Изобретение относится к области судостроения, а именно к устройствам для измерения собственной частоты бортовой качки судиа.
Известны устройства для измерения собственной частоты бортовой качки судна, содержан1ие датчики относительного крена и вычислительную систему с суммирующим усилителем и умножающим аппаратом.
С целью повышения точности замеров собственной частоты бортовой качки судна на произвольном волнении в предлагаемом устройстве один из датчиков относительного крена установлен в центре тяжести судна, а другой - }ia некотором расстоянии от первого по вертикали, нрн этом выход первого датчика ирисоединен на вход суммируюн1его усилнтоля, а выход второго датчика ирисоединен к потенциометру, двнжок которого подключен к другому входу суммирующего усилителя и связан через редуктор с электродвигателем, соеднненым с выходом умножающего аннарата, один вход которого присоединен к входу суммирующего усилителя, а другой - к выходу нервого датчика.
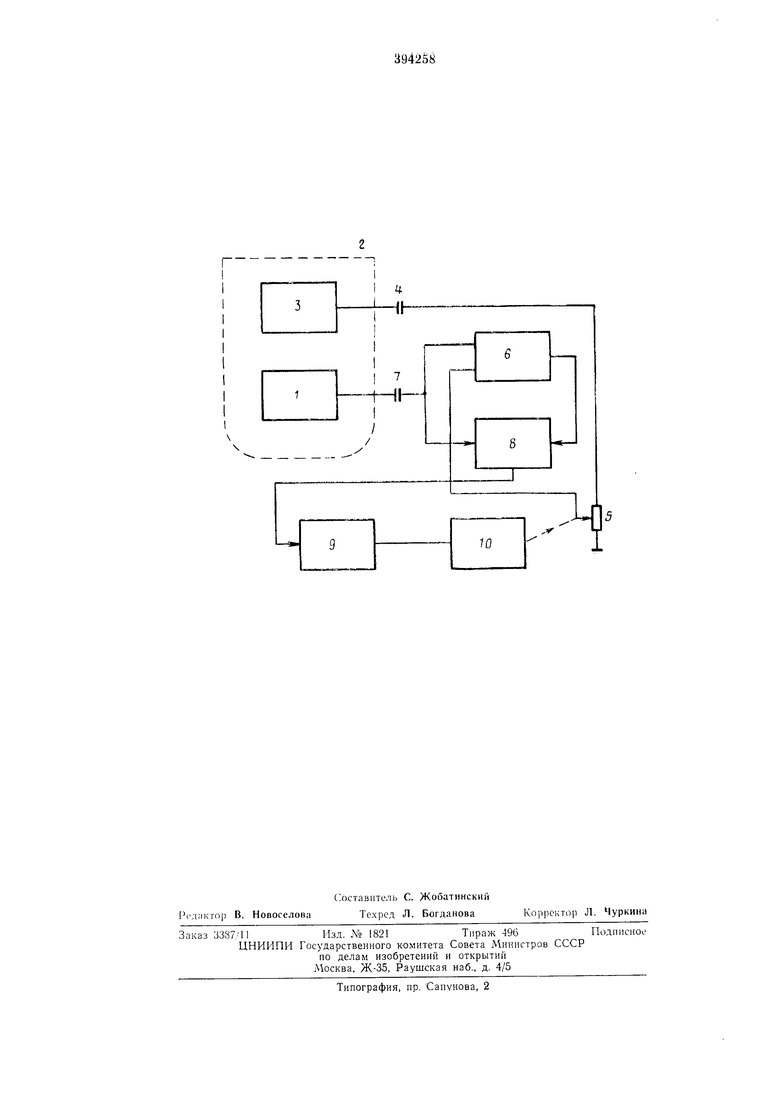
На чертеже изображена блок-схема предлагаемого устройства.
Датчик / относительиого крена, установленный в центре тяжести судна 2, и датчик 3, относительного крена установленный выще центра тяжести, нредставляет собой короткопериодные кренометры. Выход датчика крепа через конденсатор 4 подключен к потенциометру 5, двпжок которого соедипен с одним из входов суммирующего усил 1теля (.
Выход датчика / крена через конденсатор 7 соединен со вторым входом суммирующего усилителя 6 и одним из входов умножаюniero устройства 8. Второй вход умпожаюпцго аппарата включен на выход уеил1ггеля 6. На умиожаюидего устройства 8 г ключен электродвигатель 9, который через редуктор 10 соединен с движком нотенцнометра 5.
Наличие статического крена судна 2 нрнводнт к появлешпо постоянно составляюпич в спгналах датчиков / и Л относнтельног, крепа, которая отфнльтровывается конденсагналы датчиков / н ,) к|)ена
торамн -/ н 7. Ci тельным углом качки вырасвязаны с ОТПОС1 жеппями:
Л-, Q-a.,
x. Q - y.- -- Н,
спгпал датчика /,
е
Al сигнал датчика 3, А2
в, е
угол крена и его нроизводпая по
временн, а - угол поверхностного волнового
в yiiaijiiciiiiii ooproBoii клчки lioMiiMi) i.;;; Koii чгнчи iioaMvinnioineio момента читываетvH так/ко cocT,:ii..iHi(jin;iH, 11р()1И}|)цн() скорости iiiMCiiciiiin XT.ia иолиого С1 ло11а:
И-|-2o И-f-l oH 2o7-j-IF; ;,
394258
Так как
210.11 sign i
-v, sign .V, +
z 0
iSi-n.V: -.. 0
Тогда сигналы датчиков / и .-I мп/Kiii.) анисать li слсдуюн1см виде: Сшигипы датчиков / и / крена с f)aiMibi ni знаками иостунают на входы с лп;и :)у1оицмч) 20 уси;1ителя 6. Пои этом коэффипшент /(, с к,;торыА суммируется снгиал датчика о Kpeiia, изменяется с номоин к) н()тени,нометр; 5, тогда (чпиа.т на выходе хсилнтеля равен; К+ Х-г,-f 2ол-,. (Л1гиа;1 у с выхода схммнруюицмч) хсилигеля С) ностунает на один из входов yMiio/KaiOHieio устройства 5, где умножается га (ЛНнала датчика / крена: X А-, Sign Л-, , Sign л-,. Электродвигател) 9, нодг люченн) на выход умножаклнего aiHiapara i, через 10, iLMCioHUiii бол1)1оое нередаточ1гос отношеннс, иеремеи1ает двнжок нотснцномеч-ра 5 в такое нол(;)/кен1 е, нрн котором С})едн1;-е 45 ч(ине напряжения на дщпате.че 9 ста.ло бы :iaBHO нулю. 30 35 40 II;i ;1ослед 1ег1) paBeiicriia |1асче| ein для 1)ЫТ11ел1Ч1ии 1 елич11ны W 2 К 1акнм образом гю И1ь:але, С15язаи1)Г| с ;и;и: чком нотен1ии)метра 5, быт1 (;1тсчига1;; 311ачс ие coocTijeiHHjH чае|оты 6o:)Ti)B{iii кач.устройство Д.1Я ii п-еречия сооственнои частоты oopTOijoii качки , содер/кан1ее датчики отн()снтел1 |1О1Ч) к)ена и нычислнтел)Нук; ciiCTCMy с )у1(лним хсилнтелем и yi iiio:Ка огним аннаратом, olличиющссся icM. что, с нелвк) н(),чия точности ia.iepoij собстlieiHioil частоты бортово качки схдна iiai ироЛЗВОЛЬНОМ волнении, один из датчиков (ПЧЮСИTC.ibHoro Kpeifa установлен в )е тяжести , а )1) на. некспч ром расстоянии (Л HepBoio но 1 ертика:|;|, нри biioM выход первого датчика нрисоедниен на вход с мл1иi)yiOHU4-o си;лг1еля, а в1)1ход второго да.тчнj.:a :1р;ич)едииен к ютешиометру, ()К оi4)or(j нодкл очсн к дpyiЧJ 1 :5ход с ммир ющсло усилите,чя i ciuirsaH 4epje;j ) с лект|)идв 1гате;|еА;, еоединенным е выходом хмножакннего ;л1нарата, одни вход которого :1р:1соедниен i |5Ход .хг 1ирукянег() уси.чите,чя. а другоИ -- к нерво1ч;1 датчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель собственной частоты и коэффициента демпфирования бортовой качки судна | 1971 |
|
SU441193A1 |
| АВТОМАТИЧЕСКИЙ ИЗМЕРИТЕЛЬ СОБСТВЕННОЙ ЧАСТОТЫ БОРТОВОЙ КАЧКИ СУДНАВПТБЛ(^!!Л ^?!П.~Г'^т;^^ Ji ^'bni\. ^.;Ь.ГиГ й^Й | 1971 |
|
SU428980A1 |
| Стабилизатор качки судна | 1972 |
|
SU449850A1 |
| Корректор угла крена для успокоителя бортовой качки судна | 1974 |
|
SU468831A1 |
| Устройство для раскачивания модели судна | 1981 |
|
SU962774A1 |
| Устройство для измерения углов бортовой и килевой качки судна | 1986 |
|
SU1434254A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УСПОКОИТЕЛЯ КАЧКИ СУДНА С БОРТОВЫМ УПРАВЛЯЕМЫМ РАЗРЕЗНЫМРУЛЕМ | 1970 |
|
SU265745A1 |
| Устройство для амортизирующего крепления надстройки к корпусу судна | 1986 |
|
SU1311998A1 |
| Устройство для управления бортовыми рулями успокоителя качки судна | 1983 |
|
SU1147636A1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2009 |
|
RU2405712C1 |