1
Изобретение относится к автоматическим устройствам контроля остойчивости судов и .предназначено для повышения безопасности мореплавания.
Известны автоматические измерители сОбственной частоты бортовой качки судна с дятчиком крена, смещенным по вертикали относительно центра тяжести судна. Однако известные измерители не всегда обеспечивают получение достоверных данных в тех случаях, когда резонансная для данного судна составляющая обладает малой энергией, так как при этом средний период качки существенн э отличается от периода свободных колебаний.
Целью изобретения является обеспечение возможности выполнения замеров собственной частоты бортовой качки судна на произвольном волнении, повышение надежности работы прибора и обеспечение постоянного масштаба измерения.
Поставленная цель достигается тем, что в измеритель введен второй датчик крена, также смещенный по вертикали от центра тяжести судна на расстояние, отличное от смещения первого, причем оба датчика содержат по одному короткопериодному кренометру, связанному кинематически с индуктивным преобразователем угла. При этом датчики электрически связаны каждый с двумя демодуляторами и далее последовательно через
выход каждого первого из них - с двумя подстроечными резисторами и через них - с первым усилителем, имеющим обратную связь и выход которого через первый выпрямитель с фильтром подключен к источнику питания, к которому также через последовательно установленные модулятор и второй усилитель подсоелт;инены оба датчика, а выход каждого второго демодулятора связан через подстроечпый конденсатор с выходом первого усилителя и через последовательно соединенные третий усилитель, имеющий обратную связь, и второй выпрямитель - с фильтром и регистрирующим прибором с ревуном.
С целью повышения точности измерения путем исключения постоянной составляющей перед входом первого и третьего усилителей установлено по одпому разделительному конденсатору, через которые усилители можно связать электрически с присоединенными к ним элементами схемы измерителя.
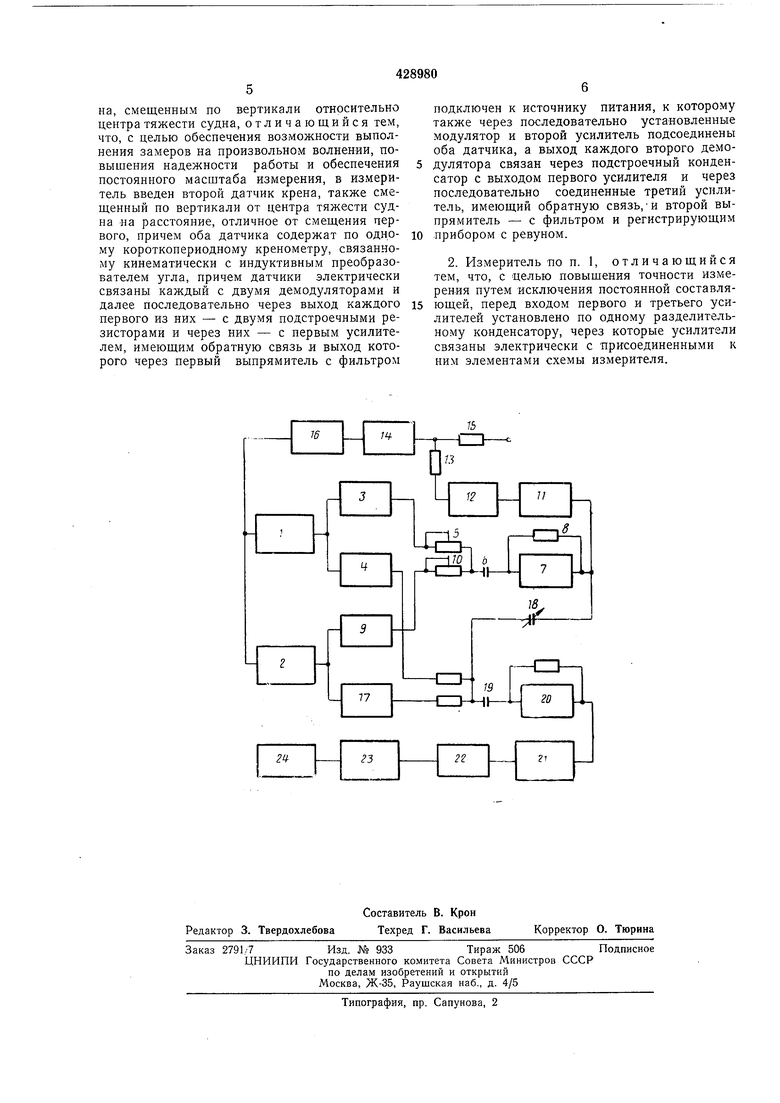
На чертеже приведена электрическая структурная схема предлагаемого измерителя.
Датчики 1 и 2 относительного крена представляют собой короткопериодные кренометры, механически соединенные с индуктизными преобразователями угла. Выход датчика 1 крена соединен с демодуляторами 3 и 4. Выход демодулятора 3 через подстроенный резистор 5 и конденсатор 6 соединен с входом усилителя 7, в цепи обратной связи которого установлен резистф 8. К входу усилителя 7 подключен также датчик 2 крена через демодулятор 9, подстроечный резистор 10 и конденсатор 6. На выход усилителя 7 включен выпрямитель 11, соединенный через фильтр 12 и резистор 13 с модуляторами 14 и резистором 15, на который подается опорное напряжение. Модулятор, 14 включен на вход усилителя 16, нагрузкой которого являются обмотки возбуждения индуктивных преобразователей датчиков 1 и 2 крена. Выход датчика 2 крена через демодулятор 17, выход усилителя 7 через подстроечный конденсатор 18, а также выход демодулятора 4 подсоединены к конденсатору 19, включенному на вход усилителя 20, выход которого через выпрямитель 21 и фильтр 22 соединен с регистрирующим прибором 23, связанным с ревуном 24. Сигналы датчиков 1 и 2 крена связаны с относительным углом качки выражениями : е - а - ATg zz: в - а - - в, где Xi, Xz - сигналы датчиков относительного крена; г, Г2 - расстояния по вертикали датчиков крена от центра тяжести судна; в, в - угол крена судна и его производная; а - угол поверхностного волнового склона; g - ускорение силы тяжести. В уравнение бортовой качки, помимо главной части возмущающего момента, входит также составляющая, пропорциональная скорости измерения угла волнового склона: в + 289 + юов : 2ба + («оя, где б - коэффициент сопротивления бортовой качке; соо - собственная частота бортовой качки. Тогда сигналы датчиков можно записать в следующем виде л, z А +-: ш )(9 - а) + 28 (9 - а)-; S Jg , f 1 + - 0) V9 - а) + 2S (0 - а)-. S Jg При наличии бортовой качки судна сигналы с датчиков 1 и 2 крена поступают на демодуляторы 3 и 4, 9 и 17, осуществляющие фазочувствительное выпрямление так, что сигналы двух демодуляторов, подключенных к одному датчику крена, имеют разные знаки. Сигналы с демодуляторов 3 и 9 поступают с разными знаками на вход сумматора, образованного операционным усилителем 7, резистором 8 обратной связи и входными подстроечными резисторами 5 и 10. При этом коэффициент, с.которым суммируется сигнал датчика 1 крена, с помощью подстроечного резистора 5 установлен пропорциональным расстоянию по вертикали датчика 2 относительного крена от центра тяжести судна, а коэффициент, с которым суммируется сигнал второго датчика, с помощью подстроечного резистора 10 установлен пропорциональным расстоянию первого датчика от центра тяжести судна. Конденсаторы б и 19 отфильтровывают постоянные составляющие соответствующих сигналов. В этом случае сигнал z/i на выходе усилителя 7 равен У 1 - Г.Х., - (г, - г,) (9 -а). Сигнал с выхода усилителя 7 через дифференцирующий конденсатор 18 с коэффициенТОМ, равным - , поступает на вход операционного усилителя 20, на два других входа которого поступают сигналы с демодуляторов 4 и 17 с разными знаками. Сигнал г/2 на выходе усилителя 20 определяется выражением ,..... 2В г., -г, 0)0 (9 - а). i/2 - а У - Выпрямитель 21 и фильтр 22 формируют напряжение, пропорциональное среднему значению модуля сигнала на выходе усилителя 20 Кроме того, выпрямитель И и фильтр 12 формируют напряжение, пролорциональное среднему значению модуля сигнала на выходе усилителя 7 y. (,)Q-a.. Это напряжение с фильтра 12 через резистор 13 поступает на модулятор 14, где вычитается из опорного напряжения, поданного через резистор 15. Полученную разность модулятор преобразует в сигнал переменного тока, который затем усиливается усилителем 16, с выхода которого напряжение поступает на обмотки возбуждения индуктивных преобразователей датчиков 1 и 2 крена. Усилитель 16 имеет больщой коэффициент усиления, поэтому среднее значение модуля сигнала на выходе усилителя сохраняется постоянным независимо от параметров качки судна и равным I f/i I ( - i) I 0 - а I : const а. Тогда выражение для сигнала на выходе фильтра 22 может быть записано как 1-I а 2 . Сигнал с фильтра 22 поступает на регистрирующий прибор 23, по шкале которого и отсчитывают значение собственной частоты бортовой качки судна. При критических значениях частоты регулирующий орган регистрирующего прибора 23 включает ревун 24. Предмет изобретения 1. Автоматический измеритель собственной частоты бортовой качки судна с датчиком крена, смещенным по вертикали относительно центра тяжести судна, отличающийся тем, что, с целью обеспечения возможности выполнения замеров на произвольном волнении, повышения надежности работы и обеспечения постоянного масштаба измерения, в измеритель введен второй датчик крена, также смещенный по вертикали от центра тяжести судна на расстояние, отличное от смещения первого, причем оба датчика содержат по одному короткопериодному кренометру, связанному кинематически с индуктивным преобразователем угла, причем датчики электрически связаны каждый с двумя демодуляторами и далее последовательно через выход каждого первого из них - с двумя подстроечными резисторами и через них - с первым усилителем, имеющим обратную связь и выход которого через первый выпрямитель с фильтром
подключен к источнику питания, к которому также через последовательно установленные модулятор и второй усилитель подсоединены оба датчика, а выход каждого второго демодулятора связан через подстроечный конденсатор с выходом первого усилителя и через последовательно соединенные третий усилитель, имеющий обратную связь, и второй выпрямитель - с фильтром и регистрирующим
прибором с ревуном.
2. Измерительно п. 1, отличающийся тем, что, с целью повышения точности измерения путем исключения постоянной составляющей, перед входом первого и третьего усилителей установлено по одному разделительному конденсатору, через которые усилители связаны электрически с присоединенными к ним элементами схемы измерителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель собственной частоты и коэффициента демпфирования бортовой качки судна | 1971 |
|
SU441193A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СОБСТВЕННОЙ ЧАСТОТЫ БОРТОВОЙ КАЧКИ СУДНА | 1973 |
|
SU394258A1 |
| Устройство для определения динамических наклонений морского судна на качке | 1987 |
|
SU1525461A1 |
| Судовой электронный кренодифферентометр | 2023 |
|
RU2817308C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ДЛЯ СУДОВ ЛЕДОВОГО ПЛАВАНИЯ | 2011 |
|
RU2487365C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПОСАДКИ АВАРИЙНОГО ПОДВОДНОГО ОБЪЕКТА В НАДВОДНОМ ПОЛОЖЕНИИ В УСЛОВИЯХ КАЧКИ | 1997 |
|
RU2116929C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УСПОКОИТЕЛЯ КАЧКИ СУДНА С БОРТОВЫМ УПРАВЛЯЕМЫМ РАЗРЕЗНЫМРУЛЕМ | 1970 |
|
SU265745A1 |
| Способ коррекции магнитного курса судна | 2024 |
|
RU2839828C1 |
| АКТИВНЫЙ УСПОКОИТЕЛЬ БОРТОВОЙ КАЧКИ СУДНА | 2015 |
|
RU2616505C1 |
| Система стабилизации судна по курсу и бортовой качке | 1982 |
|
SU1030260A1 |
15
