1
Изобретение относится к судостроению, в частности к стабилизаторам качки судна.
Известны стабилизаторы качки судна, содержащие асинхронный электродвигатель привода бортовых рулей, электрически подключенный к выходу суммирующего магнитного усилителя, датчики угла крена, скорости и ускорения изменения угла крена, связанные с преобразователем.
Цель изобретения - уменьщение дисперсии углов качки судна. Это достигается тем, что интегрирующий усилитель преобразователя посредством обратной связи подключен к суммирующему магнитному усилителю, а выходы датчиков подключены к суммирующему магнитному усилителю и интегрирующему усилителю преобразователя.
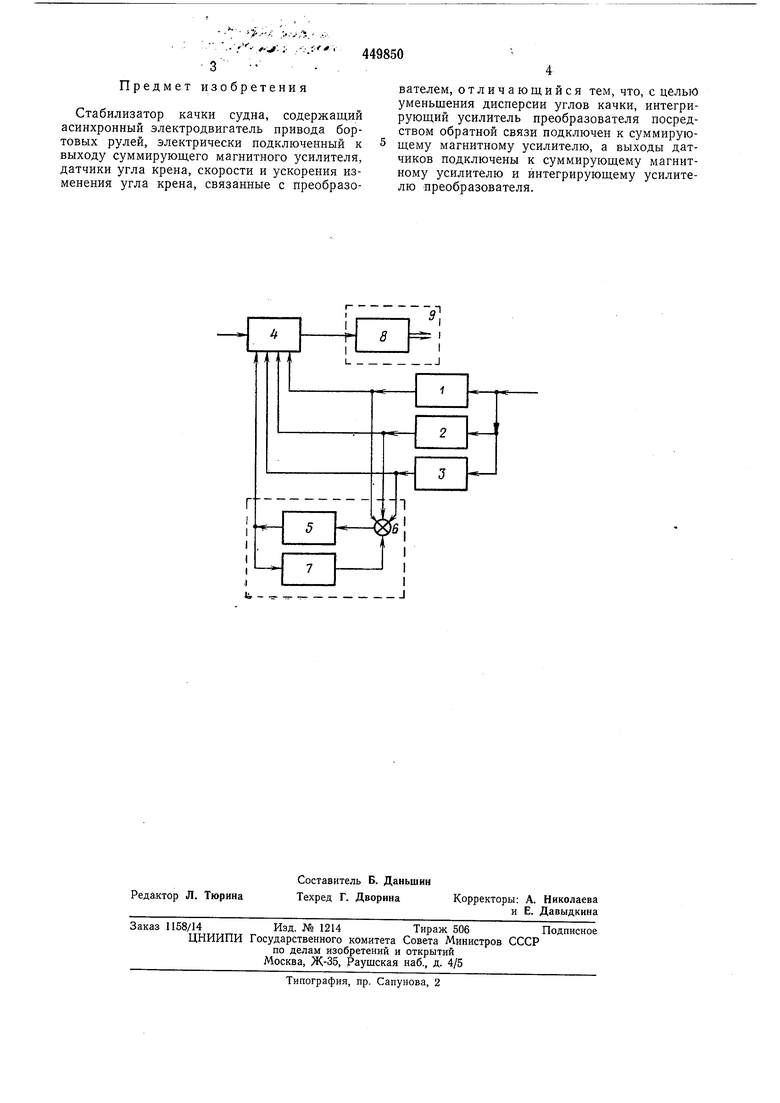
На чертеже схематически изображен описываемый стабилизатор.
Стабилизатор качки судна содержит датчик 1 угла крена, датчик 2 скорости изменения угла крена и датчик 3 ускорения угла крена, которые электрически подключены к суммирующему магнитному усилителю 4 и на вход интегрирующего усилителя 5 преобразователя 6. Интегрирующий усилитель 5 охвачен положительной обратной связью 7. Магнитный усилитель 4 подключен к асинхронному двигателю 8 привода руля 9.
Выходной сигнал (угол крена) объекта регулирования (судна) измеряется датчиком угла крена, датчиком скорости изменения угла крена и датчиком ускорения угла крена. Сигналы, пропорциональные соответственно нулевой, первой и второй производным угла крена, подаются на входы суммирующего магнитного усилителя 4 и на вход интегрирующего усилителя 5 преобразователя 6. В суммирующем магнитном усилителе 4 сигналы датчика
1, 2 и 3 суммируются между собой, и сумма этих сигналов вычитается из сигнала, задающего угол крена.
В результате непосредственной обработки сигналов датчиков магнитным усилителем
образуется первая составляющая управляющего воздействия.
Выход интегрирующего усилителя подключен на вход суммирующего магнитного усилителя 4.
В результате последовательного преобразования сигналов датчиков преобразователем 6 и суммирующим магнитным усилителем образуется вторая составляющая управляющего воздействия.
К выходу суммирующего магнитного усилителя электрически подключен асинхронный двигатель 8 привода бортового руля 9.
Получается управляющее воздействие, которое является оптимальным для стабилизации бортовой качки.
,--/ .-хЛ.
-. -V.
3
Предмет изобретения
Стабилизатор качки судна, содержащий асинхронный электродвигатель привода бортовых рулей, электрически подключенный к выходу суммирующего магнитного усилителя, датчики угла крена, скорости и ускорения изменения угла крена, связанные с преобразо449850
вателем, отличающийся тем, что, с целью уменьщения дисперсии углов качки, интегрирующий усилитель преобразователя посредством обратной связи подключен к суммирующему магнитному усилителю, а выходы датчиков подключены к суммирующему магнитному усилителю и интегрирующему усилителю преобразователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УСПОКОИТЕЛЯ КАЧКИ СУДНА С БОРТОВЫМ УПРАВЛЯЕМЫМ РАЗРЕЗНЫМРУЛЕМ | 1970 |
|
SU265745A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ УСПОКОИТЕЛЕМ КАЧКИ СУДНА | 1991 |
|
RU2013295C1 |
| Система стабилизации судна по курсу и бортовой качке | 1982 |
|
SU1030260A1 |
| Устройство для управления бортовыми рулями успокоителя качки судна | 1983 |
|
SU1147636A1 |
| АВТОМАТИЧЕСКИЙ ИЗМЕРИТЕЛЬ СОБСТВЕННОЙ ЧАСТОТЫ БОРТОВОЙ КАЧКИ СУДНАВПТБЛ(^!!Л ^?!П.~Г'^т;^^ Ji ^'bni\. ^.;Ь.ГиГ й^Й | 1971 |
|
SU428980A1 |
| Стабилизатор бортовой и килевой качки глиссера с носовым крылом и закрылками | 1973 |
|
SU495229A1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2014 |
|
RU2585500C1 |
| Устройство для формирования сигнала управления бортовыми рулями успокоителя качки судна | 1985 |
|
SU1252238A2 |
| Измеритель собственной частоты и коэффициента демпфирования бортовой качки судна | 1971 |
|
SU441193A1 |
| Система управления судном | 1977 |
|
SU644666A1 |
