Известны корректоры угла крена для успокоителя бортовой качки судна, содержащие датчик линейной скорости судна, датчик угловой скорости рыскания судна и суммирующий усилитель, первый вход которого подключен к маятниковому датчику крена.
Все известные корректоры недостаточно точны.
Предложенное устроство отличается тем, что содержит блок умножения, входы которого подключены соответственно к датчику линейной скорости судна и к датчику угловой скорости рыскания судна, а выход - к второму входу суммирующего усилителя.
Это позволяет повысить точность устройства.
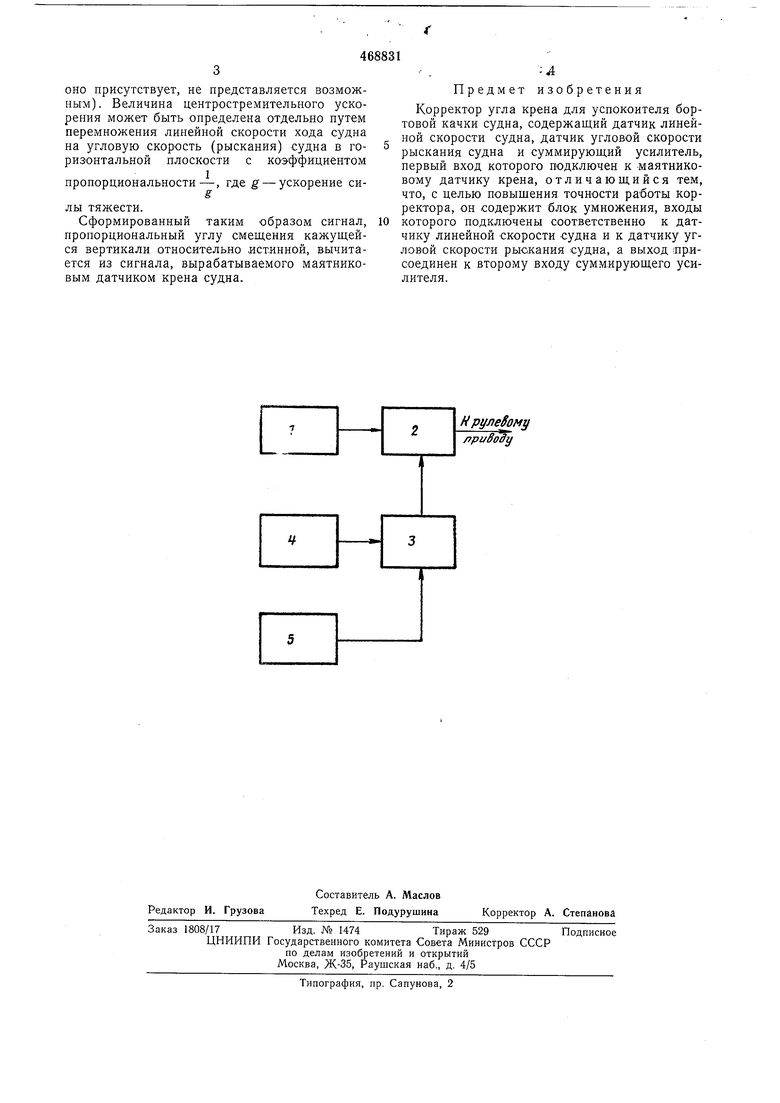
На чертеже приведена блок-схема устройства.
Оно -состоит из маятникового датчика 1 крена, суммирующего усилителя 2, на котором алгебраически суммируется напряжение, пропорциональное крену с методической ошибкой измерения, с отдельно выработанным напряжением, пропорциональным этой ощибке. Величина ошибки измерения угла крена снимается с выхода блока 3 умножения, к входам которого подключены соответственно датчик 4 линейной скорости хода судна и датчик 5 угловой скорости рыскания судна. На входе суммирующего усилителя 2 формируется напряжение, пропорциональное углу крена судна без методической ошибки, которое поступает на вход управления рулевым приводом успокоителя качки. Принцип работы устройства следующий.
При сильных маневрах, так же как и при рыскании судна по курсу, маятниковый датчик 1 крена вводит дополнительную ошибку в измеряемый угол крена судна, так как датчик устанавливается относительно кажущейся вертикали, а не истинной. Отклонение кажущейся вертикали от истинной может достигать нескольких градусов и определяется составляющей ускорения, действующей па судно в
поперечной плоскости. Во время циркуляции (или при сильном рыскании) судна в горизонтальной плоскости появляется центростремительное ускорение, величина котооого может достигать 4-9% от ускорения силы тяжести,
т. е. кажущаяся вертикаль уходит от истинной на 3-5°.
Для устранения ошибки измерения угла крена в устройстве формируется величина
ошибки измерения путем использования косвенной информации по линейной скорости судна и текущей угловой скорости рыскания судна по курсу. (Непосредственно измерить только ускорение силы тяжести и при этом не измерять центростремительное ускорение, если
оно присутствует, не представляется возможным). Величина центростремительного ускорения может быть определена отдельно путем перемножения линейной скорости хода судна на угловую скорость (рыскания) судна в горизонтальной плоскости с коэффициентом
пропорциональности-, где g - ускорение сиб
лы тяжести.
Сформированный таким образом сигнал, пропорциональный углу смещения кажущейся вертикали относительно .истинной, вычитается из сигнала, вырабатываемого маятниковым датчиком крена судна.
Предмет изобретения
Корректор угла крена для успокоителя бортовой качки судна, содержащий датчик линейной скорости судна, датчик угловой скорости рыскания судна и суммирующий усилитель, первый вход которого подключен к маятниковому датчику крена, отличающийся тем, что, с целью повышения точности работы корректора, он содержит блок умножения, входы которого подключены соответственно к датчику линейной скорости -судна и к датчику угловой скорости рыскания судна, а выход присоединен к второму входу суммирующего усилителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГОРИЗОНТАЛЬНОЙ ОРИЕНТАЦИИ АППАРАТА | 2007 |
|
RU2373562C2 |
| Одноосный силовой горизонтальный гиростабилизатор | 2020 |
|
RU2748143C1 |
| Адаптивная бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2647205C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ САМОЛЕТА | 2003 |
|
RU2240507C1 |
| Способ выставки БИНС ЛА корабельного базирования и устройство для его осуществления | 2016 |
|
RU2635398C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УСПОКОИТЕЛЯ КАЧКИ СУДНА С БОРТОВЫМ УПРАВЛЯЕМЫМ РАЗРЕЗНЫМРУЛЕМ | 1970 |
|
SU265745A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ УСПОКОИТЕЛЕМ КАЧКИ СУДНА | 1991 |
|
RU2013295C1 |
| Способ определения центра качания судна | 2024 |
|
RU2823383C1 |
| АВТОНОМНЫЙ ПОПЛАВКОВЫЙ ОДНОГИРОСКОПНЫЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОКОМПАСА | 1996 |
|
RU2120607C1 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
