Јъ 1
00
со ю
через переключатели 17 и 18 подключены цепи программной информации каждого механизма. При точном останове обоих механизмов при равенстве информации, поступающей с блоков 1,2 и по цепи 105, а также информации, поступающей с блоков 3,4 и по цепи 106, т.е. когда движение грузозахва- тов запрограммировано навстречу друг другу, возникает опасность столкновения При сдвиге во времени информации, поступающей по шине 62
каждого механизма, возникает запрет на выдвижение грузозахвата того механизма, у которого раньше поступила информация по шине 62. При отсутствии сдвига по времени информации, поступающей по цепи 62 каждого механизма, за счет временных задержек, создаваемых элементами 20 и 21, и в зависимости от положения переключателя 19 предпочтение отдается одному из механизмов. Опасность столкновения исключается. 4 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управ-лЕНия KPAHOM C дВуМя гРузОзАХВАТАМи | 1979 |
|
SU834672A1 |
| Устройство для управления автоматическими линиями обработки деталей | 1983 |
|
SU1135820A1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2309112C1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1000353A1 |
| Устройство для управления координатным транспортным средством | 1990 |
|
SU1718234A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ ПОТОКОМ СЫРЬЕВЫХ КОМПОНЕНТОВ СТЕКОЛЬНОЙ ШИХТЫ | 1991 |
|
RU2026806C1 |
| УСТРОЙСТВО для ПРОГРАММНОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ МЕХАНИЗМОМ ГАЛЬВАНИЧЕСКОЙ | 1973 |
|
SU394755A1 |
| Устройство для программного управления краном-штабелером | 1985 |
|
SU1278814A1 |
| Электропривод постоянного тока | 1985 |
|
SU1249682A1 |
| Захват автоматизированного перегружателя | 1984 |
|
SU1211201A1 |

Изобретение относится к автоматическому управлению и может быть использовано в системах программного управления погрузочно-разгрузочными механизмами. Цель изобретения - повышение надежности работы. Система для программного управления, например, двумя механизмами содержит устройства управления по вертикали 2 и 4 и по горизонтали 1 и 3. Выходы блоков датчиков фактического положения грузоподъемной платформы устройств управления по вертикали 2 и 4 и горизонтали 1 и 3 соединены с поразрядными входами блока сравнения 5. Система содержит также пять элементов И6-10, два элемента ИЛИ 11 и 12, два элемента ИЛИ-НЕ 13 и 14, два инвертора 15 и 16, три переключателя 17, 18, 19, два элемента 20 и 21 временной задержки. К соответствующим входам блока сравнения через переключатели 17 и 18 подключены цепи программной информации каждого механизма. При точном останове обоих механизмов при равенстве информации, поступающей с блоков 1,2 и по цепи 105, а также информации, поступающей с блоков 3,4 и по цепи 106, т.е. когда движение грузозахватов запрограммировано навстречу друг другу, возникает опасность столкновения. При сдвиге во времени информации, поступающей по шине 62 каждого механизма, возникает запрет на выдвижение грузозахвата того механизма, у которого раньше поступила информация по шине 62. При отсутствии сдвига по времени информации, поступающей по цепи 62 каждого механизма, за счет временных задержек, создаваемых элементами 20 и 21, и в зависимости от положения переключателя 19 предпочтение отдается одному из механизмов. Опасность столкновения исключается. 4 ил.
1
Изобретение относится к автоматическому управлению и может быть использовано в системах программного управления погрузочно-разгрузочными машинами.
Цель изобретения - повышение надежности в работе механизмов.
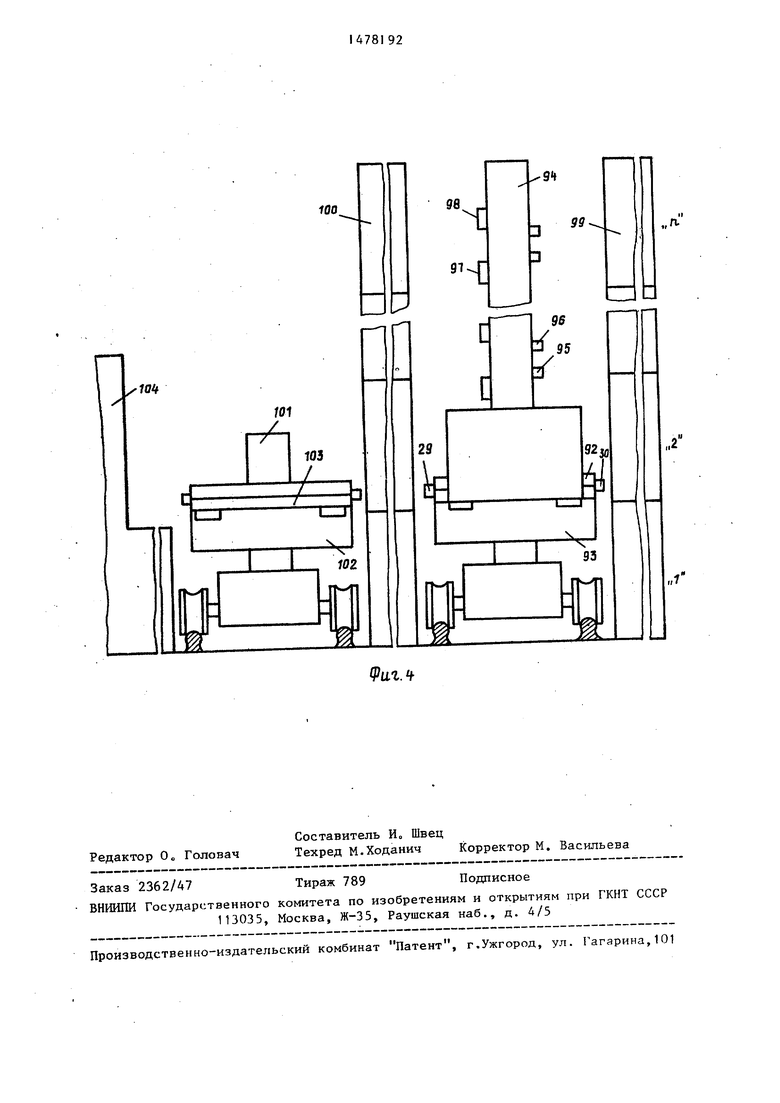
На фиг. 1 представлена функциональная схема предлагаемой системы для программного управления; на фиг 2 - функциональная схема управления по вертикали одного механизма; на фиг. 3 - функциональная схема управления по горизонтали одного механизма; на фиг. 4 - погрузочно-раз- грузочный ме- днизм.
Система дя программного управления, напр ер, двумя механизмами, один из которых содержит устройства
Iи 2 управления по горизонтали и по вертикали, а другой - устройства 3
и 4 управления по горизонтали и по вертикали, имеет блок 5 сравнения, первый 6, второй 7, третий 8, четвертый 9 и пятый 10 элементы И, первый
I1и второй 12 элементы ИЛИ, первый 13 и второй 14 элементы ИЛИ-НЕ, первый 15 и второй 16 инверторы, первый 17, второй 18 и третий 19 переключатели, первый 20 и второй 21 элементы задержки
Устройство управления по горизонтали каждого механизма содержит блок 22 задания программы, блок 23 датчиков текущего положения и блок
24сравнения, соответствующие входы которого соединены с поразрядными выходами блоков 22 и 23. Выходы блока 24 сравнения соединены с шинами
25- 27 соответственно Вперед, Равно и Назад.
Устройство программного управления по вертикали каждого механизма содержит датчик 28 фиксирования исходного положения телескопического
грузозахвата, датчики 29 и 30 фиксирования наличия груза на телескопическом грузозахвате, логический блок 31 фиксирования наличия и положения груза на телескопическом грузозахвате, импульсный блок 32, блок 33 памяти команды Пуск, блок 34 памяти и коммутации сигнала Наличие груза на телескопическом грузозахвате, датчики 35 и 36 фиксирования груза в зоне разгрузки, блок 37 датчиков текущего положения грузоподъемной платформы, блок 38 сравнения, программный блок 39, первый 40 и второй 41 блоки памяти направления перемещения грузоподъемной платформы, датчик 42 фиксирования останова грузоподъемной платформы без груза, датчик 43 фиксирования останова грузоподъемной платформы с грузом, датчик 44 фиксирования крайнего по - положения грузозахватчика, датчик
45фиксирования проезда позиции останова грузоподъемной платформой, блок
46формирования команды Опускание, блок 47 формирования команды Подъем, блок 48 формирования команды Выдвижение, блок 49 формирования команды Возврат первый 50 и второй 51 элементы ИЛИ, элемент ИЛИ-НЕ 52, первый
5 53, второй 54, третий 55, четвертый 56 и пятый 57 инверторы, элемент И 58, шину 59 Пуск, шину 60 Опускание, шину 61 Подъем, шину 62 Выдвижение, шину 63 Возврат, ши0 ну 64 Неисправность. Цепь 59
(фиг. 2) - пусковая цепь. При нажа5
тии оператором соответствующей кнопки по цепи 59 в блок 33 поступает напряжение определенной полярности, после чего система управления начинает отрабатывать цикл. Сигнал по цепи 59 может также поступать or средства вычислительной техники.
Блок 31 фиксирования наличия и положения груза на телескопическом грузозахвате содержит элементы ИЛИ 65 И 66 и И-НЕ 67.
Импульсный блок 32 содержит повторитель 68, усилитель 69, конденсатор 70 и резистор 71. Блок 33 памяти команды Пуск содержит первый 72 и второй 73 элементы ИЛИ-НЕ„ Блок 34 памяти и коммутации сигнала Наличие груза на телескопическом грузозахвате содержит второй 74 и первый 75 элементы И-НЕ, второй 76 и первый 77 элементы И0 Первый блрк 40 памяти направления и перемещения грузоподъе ной платформы содержит первый 78 и второй 79 элементы ИЛИ-НЕ. Второй блок 41 памяти направления и перемещения грузоподъемной платформы содержит первый 80 и второй 81 элементы ИЛИ-НЕ. Блок 46 формирования команды Опускание содержит элементы ИЛИ 82 и И 83.
Блок 47 формирования комнады Подъем содержит элементы ИЛИ 84 и И 85. Блок 48 формирования команды Выдвижение содержит первый 86 и второй 87 элементы И и элемент ИЛИ 88 Блок 49 формирования команды Возврат содержит первый 89 и второй 90 элементы И и элемент ИЛИ 91„ Датчики 8 и 9 фиксирования наличия груза в зоне разгрузки установлены на телескопическом грузозахвате 92 (фиг. 2). Датчики 29 и 30 фиксирования наличия груза на телескопическом грузозахвате и сам телескопический грузозахват 92 установлены на грузоподъемной платформе 93, которая, в свою очередь, установлена на колонне 94 с возможностью подъема и опускания.
Колонна 94 оснащена признаками (датчиками) зон разгрузки (на фиг 4 не показаны), признаками 95 останова грузоподъемной платформы без груза, признаками 96 останова грузоподъемной платформы с грузом, признаками 97 проезда зоны останова при опускании грузоподъемной платформы, признаками 98 проезда зоны останова при подъеме грузоподъемной платфор-
0
5
0
5
0
5
0
5
0
5
мы Количество признаков 95-98 равно количеству зон разгрузки, при этом признаки 98 проезда зоны останова при подъеме грузоподъемной платформы установлены на колонне 94 несколько выше по уровню, чем признаки 96 останова грузоподъемной платформы с грузом, а признаки 97 проезда зоны останова при опускании грузоподъемной платформы установлены несколько ниже по уровню, чем признаки 95 останова грузоподъемной платформы без груза
Колонна 94 одного механизма установлена между стеллажами 99 и 100 с возможностью перемещения по рельсовому пути, проложенному вдоль обслуживаемых стеллажей 99 и 100, имеющих с по зоны разгрузки
Колонна 101 с грузоподъемной платформой 102 второго механизма, имеющей грузозахват 103, установлена между стеллажами 100 и 104 и перемещается по проложенному между этими стеллажами рельсовому путио
Система имеет входы 105, 106 и выходы 107-108.
Система работает следующим образом.
При перемещении и останове обоих механизмов и их грузоподъемных платформ 93 и 102 с блоков 1 - 4 на блок 5 сравнения поступает информация о фактическом положении транспортных механизмов на линии0 Одновременно с этим по цепям 105 и 106 может поступать программная информация о необходимости выдвижения телескопических грузозахватов 92 и 103 в сторону стеллажа 100.
При этом могут возникнуть следующие си туа ции„
При точном останове обоих транспортных механизмов информация, поступающая с блоков 1,2 и по цепи 105, не совпадает с информацией, поступающей с блоков 3,4 и по цепи 106 Это соответствует тому, что грузозахваты механизмов после останова механизмов находятся не друг против друга или выдвижение их запрограммировано в противоположные стороны При этом опасность встречного столкновения грузозахватов отсутствуете
На выходе блока 5 сравнения и входах элементов И 6, 7 и 9 присутствует потенциал с уровнем логичес5U
кого О Прохождение информации через элементы И 6,7 и 9 запрещено.
Команды выдвижение грузозахвата по цепям 62 с выходов блоков 2 и 4 поступают через элементы 20 и 21 временной задержки на входы элементов И 8 и 10. При этом на других входах элементов И 8 и 10 присутствует потенциал с уровнем логической 1, так как на выходах инверторов 16 и 15 и выходе блоков 1 и 3 (точ- ,ный останов по горизонтали) потен- ,циал с уровнем логической 1. Команды Выдвижение грузозахватов по цепям 107 и 108 могут проходить i как одновременно, так и раздельно.
При точном останове обоих транспортных механизмов информация, поступающая с блоков 1 и 2 и по цепи 105, совпадает с информацией, поступающей с блоков 3 и 4 и по цепи 1060 Это соответствует тому, что грузо-- захваты транспортных механизмов после останова последних находятся друг против друга и выдвижение их запрограммировано навстречу друг другу. Возникает опасность столкновения грузозахватов, если они начнут выдвигаться одновременное
При этом могут возникнуть два состояния,,
Первое состояние - команды на выдвижение грузозахватов с блоков 2 и 4 поступаю со сдвигом во времени. Предположи что команда на выдвижение с блоз 2 по цепи 62 поступила раньше команды по цепи 62 с блока 4„ При этом сигналы с уровнем логической 1 поступают с выхода блока 5 сравнения на входы элементов И 6,7 и 9 с выхода блока 1 (точный останов по горизонтали) на входы элементов И 6,7 и 8 с выхода блока 3 (точный останов по горизонтали вто- рого транспортного механизма) на выходы элементов И 7,9 и 10 с выхода 62 блока 2, на выход элемента 20 задержки и через элемент ИЛИ 11 на входы элементов И 6 и 7. При этом че рез небольшую временную задержку на входе элемента И 8 появляется потенциал с уровнем логической 1, на остальных входах также присутствует потенциал с уровнем логической 1, так как на входе инвертора 15 потенциал с уровнем логического О, а на выходе блока 1 потенциал с уровнем логической 1. На выходе
926
107элемента И 8 появляется сигнал Выдвижение грузозахвата 0 Одновременно с этим на одном из входов элемента И 9 появляется потенциал с уровнем логического О, так как на входе инвертора 15 потенциал с уровнем логического На выходе инвертора 15 присутствует потенциал с уровнем логической 1.
На выходе инвертора 16 и входе элемента И 10 присутствует потенциал с уровнем логического О. При этом прохождение информации на выдвижение грузозахвата через элемент И 10 запрещено до тех пор, пока не закончится цикл работы грузозахвата первого транспортного механизма„
Второе состояние - команды на выдвижение грузозахватов с блоков 2 и 4 поступают одновременно.
При этом на всех входах элемента И 7 временных элементов 20 и 21 на двух из входов элементов И 8 и 10 появляется потенциал с уровнем логической 1. За счет временных задержек, создаваемых временными элементами 20 и 21, на выходах 107 и
108элементов И 8 и 10 команды Выдвижение грузозахватов не появляются. Одновременно с этим с выхода элемента И 7 через переключатель 19 потенциал с уровнем логической 1 поступает на один из входов элементов ИЛИ-НЕ 13 или 14. Если потенциал с уровнем логической 1 поступает на элемент ИЛИ-НЕ 13, то приоритет работы с грузозахватом отдается второму транспортному механизму, если на ИЛИ-КЕ 14, то приоритет работы грузозахватом отдается первому транспортному механизму. Предположим, что программой установлено отдать приоритет работы второму механизму, то тогда на выходе элемента ИЛИ-НЕ 13 и на одном из входов и выходе элемента И 6 появляется потенциал
с уровнем логического О, а на выходе инвертора 16 и входе элемента И 10 - потенциал с уровнем логической 1. Далее, после окончания временных задержек на входе элементов И 8 и 10 появляется потенциал с уровнем логической 1м, но проходит сигнал только через элемент И 10, так как на одном из входов элемента И 8 потенциал с уровнем логического О, поступивший с выхода инвертора 15. Одновременно с этим
с выхода элемента 10 по цепи 108 на вход элемента ИЛИ-НЕ 13 поступает сигнал с уровнем логической 1. Запрет на работу грузозахвата первого транспортного механизма продолжается до тех пор, пока не закончится цикл работы грузозахвата второго транспортного механизма и не снимется потенциал с уровнем логической 1 с выхода элемента ИЛИ 12. После этого цикл работы грузозахвата транспортного механизма начинается автоматические Длительность временной задержки, создаваемой временными элементами 20, 21, должна превышать суммарное время прохождения сигнала через элементы ИЛИ 11, И 7, ИЛИ-НЕ 13, И 6, инвертор 16, И 10„
Временной сдвиг при программировании перемещений транспортных механизмов учитывается, но отрабатывание последовательно циклов сначала одним, потом другим механизмом снижает производительность работы транспортных механизмов В предлагаемой системе временной сдвиг может быть минимален. При этом главное заключа - ется в том, чтобы после установки груза в ячейку первым транспортным механизмом второй не начинал бы его взятие до тех пор, пока первый не убрал грузозахват в исходное положение, т0е0 дать первому механизму закончить цикло
С целью исключения возможности столкновения грузозахватов (например, при сбоях в программировании взаимной работы транспортных механизмов) система автоматически отдает приоритет тому механизму, который первым начал отрабатывать цикл грузозахватом„
Вероятность того, что отработка грузозахватами циклов начнется одновременно (например, при сбоях в программировании) ничтожно мала, но в системе предусмотрена блокировка и на эту ситуацию, при этом предпочтение отдается одному из механизмов. Для этого переключатель 19 (фиг. 1) устанавливается однажды и на все время в положение, при котором приоритет отдается какому-то одному механизму. Но эта блокировка срабатывает только в случае начала одновременной работы грузозахватов обоих механизмов. Если один из грузозахватов
начнет обработку раньше другого, то приоритет автоматически отдается ему. Таким образом, предлагаемая система для программного управления двумя механизмами позволяет повысить надежность и безопасность работы механизмов за счет исключения столкновения выдвигающихся навстречу грузозахватов двух соседних механизмов
Формула изобретения
Система для программного управле5 ния механизмами, содержащая для каждого механизма устройство управления по вертикали и по горизонтали, состоящее из блока сравнения, первые входы которого соединены с
0 поразрядными выходами блока датчиков текущего положения, вторые входы - с выходами блока задания программы, отличающаяся тем, что, с целью повышения надежности в работе
5 механизмов, в систему введены дополнительный блок сравнения, два элемента ИЛИ, пять элементов И, два инвертора, два элемента ИПИ-НЕ, три переключателя и два элемента за0 держки, поразрядные выходы блоков датчиков положения грузоподъемной платформы каждого механизма соединены с поразрядными входами дополнительного блока сравнения, выходы
5 блоков формирования команд Опускание, Подъем, Выдвижение и Возврат схемы управления по вертикали первого механизма подключены через первый элемент ИЛИ к первым входам
0 первого и второго элементов И, причем первый вход первого элемента ИЛИ подключен к выходу блока формирования команды Выдвижение и через первый временный элемент к первому входу
5 третьего элемента И, выходы блоков формирования команд Опускание, Подъем, Выдвижение и Возврат схемы управления по вертикали второго механизма подключены через второй
0 элемент ИЛИ к второму входу второго элемента И и к первому входу четвертого элемента И, причем первый вход второго элемента ИЛИ подключен к выходу блока формирования команды Выдвижение и через второй временной элемент - к первому входу пятого элемента И, выход по шине Равно схемы управления по горизонтали первого механизма подключен одновременно к третьему входу второго элемента И и к вторым входам первого и третьего элементов И, выход по шине Равно схемы управления по горизонтали второго механизма подключен к четвертому входу второго элемента И и к вторым входам четвертого и пятого элементов И, цепи программной информации каждого механизма подключены через первый и второй переключатели к соответствующим входам блока сравнения, выход которого подключен к третьим входам первого и четвертого элементов И и к пятому входу второго элемента И, выход которого подключен к общему выводу третьего переключателя, размыкающий контакт
0
которого подключен к первому входу первого элемента ИПИ-НЕ, а замыкающий контакт - к первому входу второго элемента ШШ-НЕ, второй выход которого подключен к выходу третьего элемента И, а выход - к четвертому входу четвертого элемента И, выход которого через первый инвертор подключен к третьему входу третьего элемента И, выход пятого элемента И подключен к второму входу первого элемента ИЛИ-НЕ, выход которого подключен к четвертому входу первого элемента И, выход которого через второй инвертор подключен к третьему входу пятого элемента И0
Фиг. 2
Фагл
| Авторское свидетельство СССР № 1032916, кл„ G 05 В 19/18, 1981 | |||
| Устройство для управления автооператорами автоматической линии | 1976 |
|
SU616610A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
