1
Изобретение относится к области числового программного управления металлорежущими станками.
Известный цифровой интерполятор, содержащий блок линейно-круговой интерполяции, соединенный с выходом блока скорости и входом счетчика суммы, обладает недостаточно широкими функциональными возможностями.
Цель данного изобретения -расширение функциональных возможностей интерполятора. Интерполятор содержит блок круговой интерполяции, ко входу которого подключен выход делителя, его вход соединен с выходом умножителя, ко входу последнего подключен выход блока скорости.
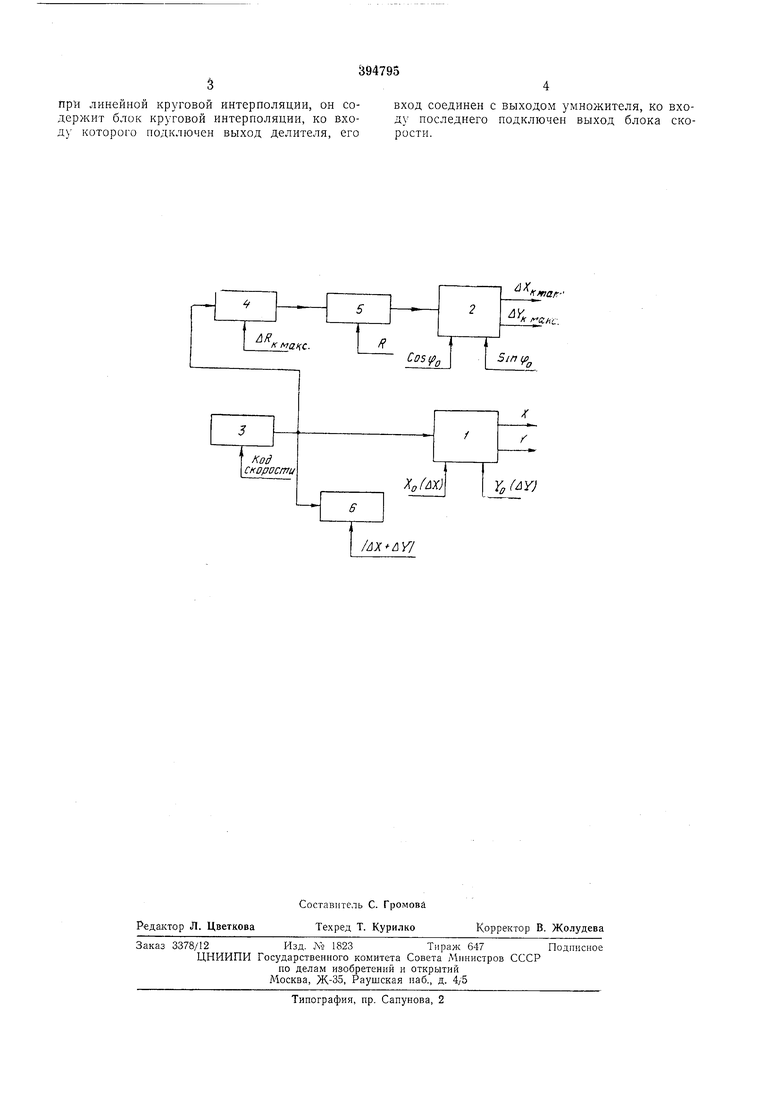
На чертеже приведена блок-схема интерполяции: блок линейно-круговой интерполяции /, блок круговой интерполяции 2, блок скорости 3, умножитель 4, делитель 5, счетчик суммы 6.
в качестве исходных данных в режиме круговой интерполяции задаются: в блок / координаты начала обработки .о, о, в блок 2 - функции начального угла обработки
XolJ и sjncpe .
в счетчик суммы 6 - сумма приращений по координатам основного контура (), указываются направления обработки и скорость. С пуском схемы импульсы с блока задания скорости 3 попадают в основной интерполятор / и через блоки умножения 4 и деления 5 - в блок круговой интерполяции 2. Они же подсчитываются счетчиком 6, который в нужный момент производит остановку решения.
В умножителе 4 происходит умножение числа импульсов, приходящих из блока заДания скорости 3 на величину макс; в делителе 5 полученное число импульсов делится на величину радиуса R отрабатываемой окружности. Выходные импульсы делителя 5 подаются в блок круговой интерполяции 2..
В режиме линейного интерполирования в блок / задаются проекции участка отработки на координатные оси АХ и АУ блок 2 не работает. В счетчик суммы задается (). Устройство позволяет производить в режиме круговой интерполяции синхронное вычисление величин приращений коррекции и координат основного контура.
Предмет изобретения
Цифровой интерполятор, содержащий б.пок линейно-круговой интерполяции, соединенный с выходом блока скорости и входом счетчика суммы, отличающийся тем, что, с целью одновременного вычисления приращений координат основного контура и величин коррекции
при линейной круговой интерполяции, он содержит блок круговой интерполяции, ко входу которого подключен выход делителя, его
вход соединен с выходом умножителя, ко входу последнего подключен выход блока скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| Многокоординатный линейно-круговой интерполятор | 1978 |
|
SU746428A2 |
| Линейно-круговой интерполятор | 1982 |
|
SU1149218A1 |
| Цифровой интерполятор | 1977 |
|
SU665286A1 |
| Линейно-круговой интерполятор | 1984 |
|
SU1215090A2 |
| Многокоординатный линейно-круговой интерполятор | 1984 |
|
SU1156008A1 |
| Линейно-круговой интерполятор | 1985 |
|
SU1302241A2 |
| Линейно-круговой интерполятор | 1977 |
|
SU734615A1 |
| Линейно-круговой интерполятор | 1975 |
|
SU555381A1 |
| Линейно-круговой интерполятор | 1978 |
|
SU860004A2 |
ктакXofuX)
