1 ,
Изобретение относится к числовому программному управлению станками, может быть использовано для построения эквидистантных контуров при обработке деталей; является усовершенствованием известного устройства по авт. св. № 451061.
В основном авт. св. 451061 описан многокоординатный линейно-круговой интерполятор, содержащий блок задания скорости, первый и второй блоки линейно-круговой интерполяции, блок линейной интерполяции, первый и второй счетчики и схему совпадения. Данный линейно-круговой интерполятор, предназначенный для одновременной ,и синхронной отработки без кЬррекции двух независимых Друг от Друга контуров, может быть использован для отработки одного кон тура с корре1 цией. В этом случае вычисляются величины коррекции одновременно - приращения координат основного контура. На выходе такого устройства отдельно выдаются приращения координат основного контура и величин коррекции, которые склацываются в системе управления станком.
Однако при использовании устрой ства по авт. св. 451061 для вычис-. ления контура с коррекцией величина коррекции имеет только одно фиксированное, значение, поэтому каждому контуруобработки должен соответствовать заданный инструмент.
Кроме того, в известном интерполяторе величины коррекции вычисляют10ся независимо от того, будет использоваться коррекция или нет (на линейных участках обработки). Если контур делали имеет места изломов, при Обработке которых необходимо
5 развернуть вектор коррекции без
перешщения по основным координатам то на время разворота вектора необходимо остановить подачу инструмента. Если время остановки превышает
20 некоторую допустимую величину (например, для (й)езерных станков 0,01 сек), появляются погрешности обработки, приводящие к браку детали. Это также ограничивает функ25циональные возможности интерполятора. .
Целью дополнительного изобретения является расширение функциональных возможностей интерполятора. Это
30
постигается тем, что в интерполят ор введены блбк умножения,,-блок Деления, первый и второй блоки суммирования, причем входы первого блока суммирования соединены с первыми выходами первого и второго Олоков линейно-круговой интерполяции, вторые выходы которых подключены ко входам второго блока суммирования, выход блока деления соединен со вторым входом блока линейной интерполяции и вторым входом счетчика, ai вход блока деления подключен к выходу блока умножения.
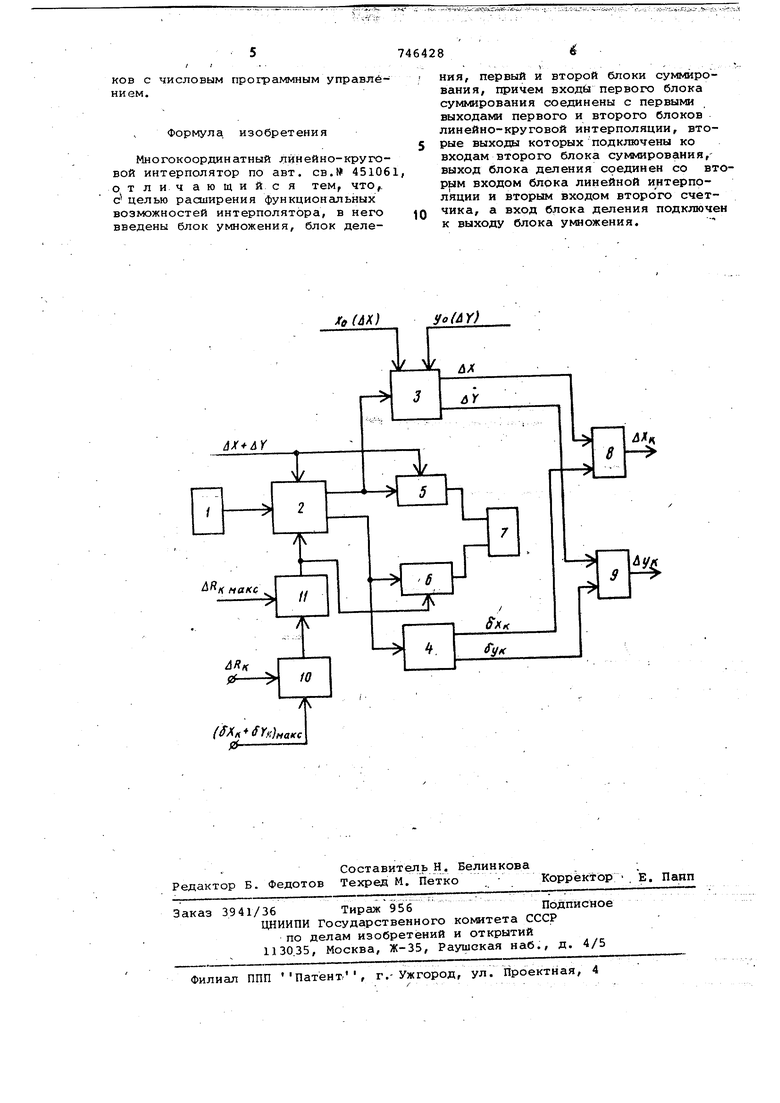
На чертеже представлена структурная схема устройства.
Устройство содержитблок задания скорости 1, блок линейной интерполяции 2, первый и второй блоки 3, 4 линейно-круговой интерполяции, первый и второй счетчики 5, 6, схему совпадения 7, первый и второй блоки 8, 9 суммирования, блок умноЛенкя 10, блок деления 11.
Устройство работает следующим образом.
В режиме круговой интерполяции с перфоленты вводят: в блок задания скорости 1 - код скорости; в блок линейной интерполяции 2 и в счетчик 5 - сумму координатных приращений основного контура (Дх + ДV ); в блок линейно-круговой интерполяции 3 - координаты начальной точки основной дуги Хр, Y(,; в блоки сумгдарования 8, 9 - знак суммирования приращений; в блок умножения 10 - сумму координатных приращений контура коррекции {6х )„ахс - максимального значения радиуса и необходимую величину коррекции Л.
Сумма координат приращений контура коррекции для. максимального значения радиуса коррекции;
-uf. А
к/иокс.
где (АХ + ДУ)
- сумма координатных приращений осНОБНОго контура;
R - радиус окружности основго о контура;
VaKC- максимально возможная величина радиуса коррекции.
С пуском схемы в блоке умножения 10 проходит перемножение ( Sy)jijg,f(C необходимую величину радиуса коррекции uR, а в блоке 11 деление полученной величины на Кмтс выходе блока 11 образуется величина (ОХ„ + ОУ ), соответ.ствующая сумме координатных приращёний контура коррекции даЯ эаданного радиуса коррекции А RK. Таким образом, исходными данными для блока 5 являются:
(Дх +дУ) - сумма координатных приращений основного контура и (Sх + (5V ) - сумма координатных прирсинений контура коррекции.
Кроме того, величина ( ) с выхода блока деления 11 поступает на вход счетчика 5.
Блок 2 распределяет импульсы,поступающие на его вход с блока 1 задания скорости, на блоки линейно-круговой интерполяции 3, 4 в соответствии с отношением (их +ДУ) ; (ох +
+ ).. .
В блоке линейно-круговой интерполяции 3 происходит вычисление приращений координат лх,ДУ основного контура, а в блока линейно-круговой интерполяции 4 - приращение координат
контура коррекции их, сЯг,, .
В соответствии
с установленными знаками суммирования в блоке 8 образуются приращения координаты Лх для скорректированного контура, а в блок 9 - приращения координаты лУ,.
Момент окончания отработки определяется счетчиками 5,6 и схемой совпадения 7 .
В режиме линейной интерполяции, когда вводить коррекцию контура нет необходимости ( AR 0) / сигнал на выходе блока умножения 10 равен нулю.
Следовательно, с выхода блока деления 11 на второй вход блока линейной интерполяции 2 и второй вход счетчика 6 не поступает никакой информсщии, поэтому,в режиме линейной интерполяции работают блок задания, скорости 1, блок линейной интерполяции 2, блок линейно-круговой интерполяции 4, счетчик 6.,
В качестве исходных данных задают:
в блок 1 - код скорости,
в блок 2 и в счетчик 6 - сумму координатных приращений контура ( Л X +лУ), в блок 3 - приращения координат линейного участка Дх,лу.
Применение предлагаемого изобретения позволяет использовать для изготовления деталей на станках с числовым программным управлением немерный инструмент, т.е. не требует точного соответствия размеров обрабатывающего инструмента расчетному эквидистантному контуру. Использование данного устройства повышает таттже точность обработки контуров со сложной конфигурацией, имеющей места изломов.
Кроме того, управляющая программа, рассчитанная на один строго фиксированный размер инструмента, может быть использована для инструмента, размер которого отличается от расчетного на величину - f,, без пересчета исходных данных, что упрощает подготовку программ для станков с числовым программным управлением.
Формула, изобретения
Многокоординатный линейно-круговой интерполятор по авт. св. 451061, от л ич аю щи йс я тем, что,. с целью расширения функциональных возможностей интерполятора, в него введены блок умножения, блок делеНИН, первый и второй блоки суммирования, причем входи первого блока суммирования соединены с первыми выходами первого и второго блоков линейно-круговой интерполяции, вторые выходы которых подключены ко входам второго блока суммирования,выход блока деления соединен со втор м входом блока линейной интерполяции и вторым входом второго счетчика, а вход блока деления подключен к выходу блока умножения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многокоординатный линейно-круговой интерполятор | 1984 |
|
SU1156008A1 |
| Линейно-круговой интерполятор | 1982 |
|
SU1149218A1 |
| Многокоординатный линейно-круговой интерполятор | 1977 |
|
SU732815A2 |
| Линейно-круговой интерполятор | 1984 |
|
SU1215090A2 |
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| Линейно-круговой интерполятор | 1985 |
|
SU1302241A2 |
| Линейно-круговой интерполятор | 1985 |
|
SU1259218A1 |
| ЦИФРОВОЙ ИНТЕРПОЛЯТОР | 1973 |
|
SU394795A1 |
| Линейно-круговой интерполятор | 1975 |
|
SU555381A1 |
| Линейно-круговой интерполятор | 1983 |
|
SU1265700A2 |
(S)( ,
HoUY)
/tf (&)()
