Изобретение относится к транспортированию и может быть использовано в вакуумной, радиационной и химической промышленности.
Известны устройства для крепления грузонесущих механизмов к ги-бкому тяговому органу с возвратно-поступательным пере.мещением, использующие фигурные захваты, закрепляемые на гибком тяговом орга«е, для кине.матического замыкания с элементами связи, уста«авливаемы.ми на грузонесущем механизме. Однако известные устройства не обеспечивают автоматического сцепления и расцепления грузонесущего механизма с гибким тяговым органом при необходимости их совместного пере-мещения, что ограничивает применение известных устройств в автоматизированных системах тралопортировки.
Цель изобретения - обеспечить автомат:;ческое сцепление и расцепление грузонесущих мехализмов с гибким тяговым органом и их совместное перемещение.
Достигается это тем, что захват выполнен в виде Z-образного основания с продольным П-об:разным пазом и -поперечным Т-образным вырезом, перед которым и сзади него по обе стороны продольного паза установлены две пары клиновидных .направляющих, расположенных друг относительно друга так,
что передний клин имеет нревыщение над задним .клином и частично перекрывает его, а задний нроходит от К-образного выреза переднего клина и частично перекрывают Т-образный вырез в основании, приче.м упругий элемент, скользящий по клиновидным направляющим, имеет Т-образную форму с изогнутым хвостовиком.
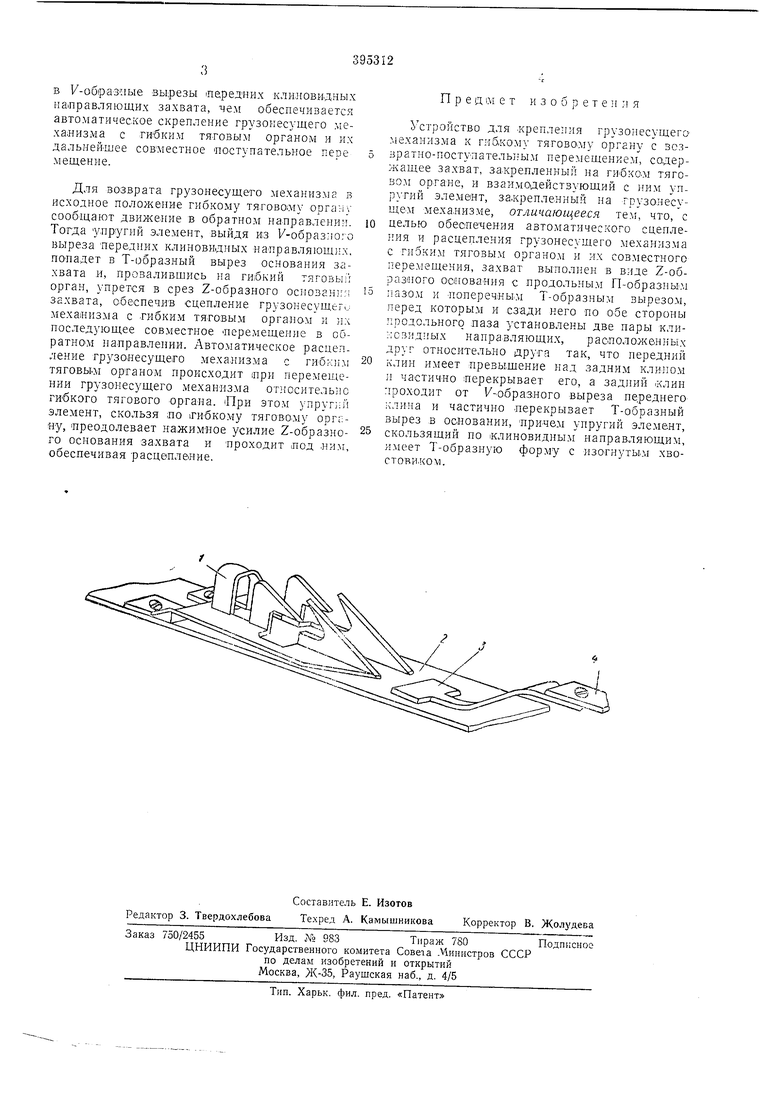
На чертеже представлено
предла.гаемое Зстройство, общий вид.
Клиновидный захват / жестко закреплен на гибком тяговом органе 2 и взаимодействует с упругим Т-образным элементом 3, закрепленным на грузонесущем механизме 4. Угол наклона клиновидных направляющих захвата не превышает 20-25°, а хвостовик упругого элемента имеет ширину, .меньщую, чем расстояние между клиновидными направляющими.
При подаче грузонесущего механизма на гибкий тяговый орган упругий элемент скользит по нередним .клиновидным направляющим захвата, проходит их и останавливается на задних клиновидных направляющих. В этот момент начинается иоступательное движение гибкого тягового органа совместно с захвато.м, и упругий элемент, пройдя то скосам задних клиновидных направляющих, попадает в У-образлые вырезы 1передних клиловидных направляющих захвата, чем обеспечивается автоматическое скрепление грузокесущего механизма с гибким тяговым органом и их дальнейшее совместное поступательное пере мещение. Для возврата грузонесущего механизма в исходное положение гибкому тяговому opravi-, сообщают движение в обратном направлении. Тогда упругий элемент, выйдя из 1/-образ)1о;о выреза передних клиновидных направляющих, попадет в Т-образиый вырез основания захвата и, провалившись иа гибкий тяговьп орган, упрется в срез Z-образиого оспованил захвата, обеспечив сцепление грузонесущеги механизма с -гибким тяговым органо-м и нх последующее совместпое перемещение в обратно направлении. Автоматическое расцепление грузонесущего механизма с гибк1 м тяговы.м органом происходит при перемещении грузонесущего механнзма относительно гибкого тягового органа. |При этом упруг;;й элемент, скользя по 1ГИбкому тягово.му органу, Преодолевает нажимное усилие Z-образного основания захвата и проходит .под нлуг, обеспечивая расцепление. Пред 1М е т изобретен ;i я Устройство для .крепления грузонесущего механизма к гибкому тяговому органу с воз 5ратно-поступателы ым перемещением, содержащее захват, за.крепленный на гибком тягово.м органе, и взаимодействующий с ним упругий элемент, закрепленный на грузонесущем механизме, отличающееся те.м, что, с целью обеспечения автоматического сцепления и расцепления грузонесущего механизма с гибким тяговым органом и их совместного перемещения, захват выполнен в виде Z-образного основания с продольным П-образным пазом и поперечным Т-образным вырезом, перед которым и сзади него по обе стороны продольного паза установлены две пары клиК031-1ДНЫХ направляющих, расположенных друг относительно друга так, что передний клин имеет превышение над задним клином п частично перекрывает его, а задний .клин проходит от V-образного выреза переднего ;члина и частично перекрывает Т-образный вырез в основании, причем упругий элемент, скользящий по .клиновидным направляющим, имеет Т-образную форму с изогнуты-м хвоСТОВИКОМ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортная система | 1982 |
|
SU1167115A1 |
| Устройство для транспортировки грузонесущих механизмов тележечного типа в вакуумных камерах | 1973 |
|
SU526575A1 |
| ВЕРТИКАЛЬНО-ЗАМКНУТЫЙ КОНВЕЙЕР | 1973 |
|
SU398458A1 |
| Забойный пластинчатый конвейер | 1982 |
|
SU1102724A1 |
| САМООЧИЩАЮЩИЙСЯ КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279393C1 |
| ПРОХОДЧЕСКИЙ РОБОТ И ТРАНСПОРТИРУЮЩИЙ МЕХАНИЗМ ПРОХОДЧЕСКОГО РОБОТА | 1988 |
|
SU1549153A1 |
| Вертикально-замкнутый тележечный конвейер | 1985 |
|
SU1265102A1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| Быстросъемная сцепка транспортного средства с рабочим органом | 1989 |
|
SU1654597A1 |
| Крутонаклонный ленточный конвейер | 1984 |
|
SU1703582A1 |
