1
Изобретение относится к механизации внутрицехового транспортирования изделий и применяется при их обработке и изготовлении.
Известен вертикально-замкнутый конвейер, содержащий опориую раму, размещенные «а ней привод конвейера и перемещаемые по направляющим грузонесущие каретки на ходовых роликах, связанные с тяговым органом привода конвейера посредством механизма сцепления.
Однако в известных конвейерах наклонное положение грузонесущих кареток при перемещении их с одного яруса на другой может являться причиной несохранности отдельных видов транспортируемых изделий, что снижает эффективность применения таких конвейеров.
Цель предлагаемого изобретения - обеспечение горизонтального положения кареток при работе конвейера, а также уменьшение тягового усилия.
Для этого в .предлагаемом вертикальнозам:кнутом конвейере механизм сцепления выполнен в виде платформы с опорными роликами, закрепленными на тяговом органе, перемещаемой по дополНителБным направляющим, установленным под направляющими каретки, и снабженной установленным по ее центру захватом, выполненным ;в виде штыря с фигурной головкой, а каретка онабл е«а закрепленными на осях зацепами с рычагами, взаимодействующими с захватом платформы.
Тяговый орган привода конвейера может быть выполнен в виде двух параллельно расположенных цепей, огибающих концевые звездочки, смещенные на величину, равную расстоянию между осями ходовых роликов платформы.
С целью центрирования грузонесущей каретки на платформе, ходовые ролики каретки могут быть выполнены с канавками по окружности под :полозья, установленные на платформе.
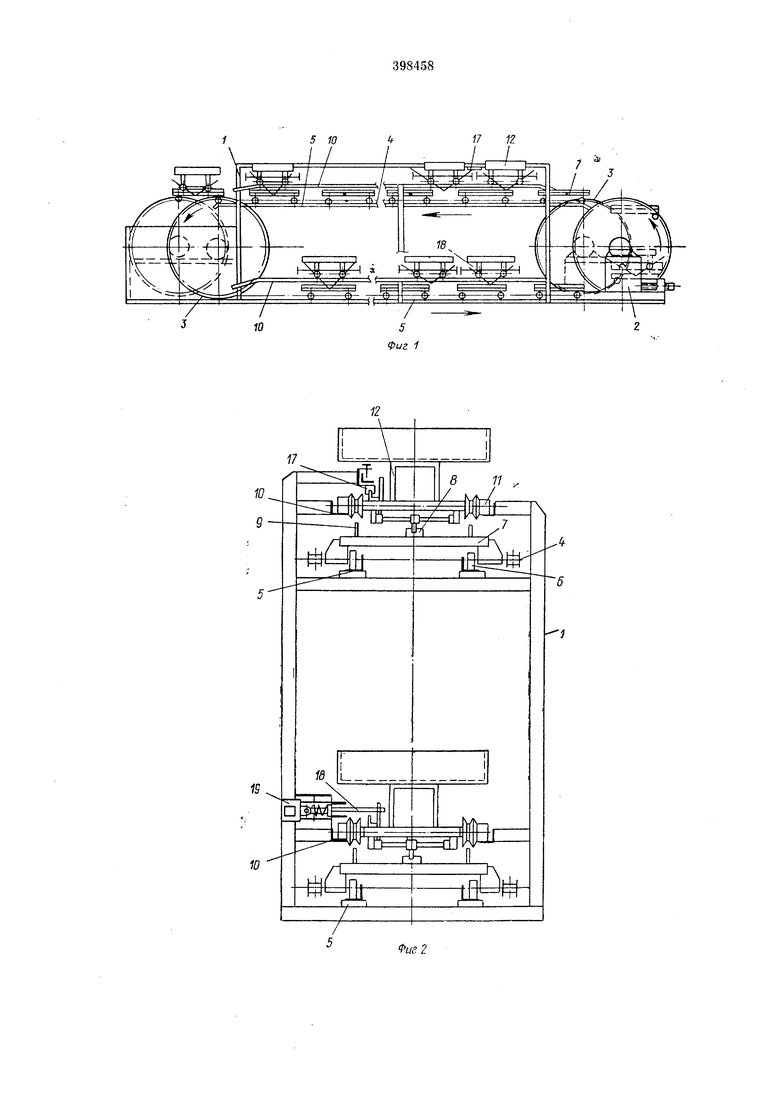
На фиг. 1 изображен предлагаемый конвейер, общий внд; на фнг. 2 - то же, поперечное сечение; па фиг. 3 - положение механизма сцепления при останове каретки; на фиг. 4 - положение механизма сцепления при переходе каретки с верхней направляющей на нижнюю или наоборот.
Иа опорной раме 1 смонтирован привод 2 с параллельно расположенными и огибающими концевые звездочки 3 тяговыми цепями 4, между которыми на направляющих 5 с помощью ходовых роликов 6 перемещаются платформы 7, снабженные по их центру захватом 8, а по краям - полозьям 9. Над направляющими 5 расположены направляющие 10, по которым с помощью ходовых роликов
11, выполненных с канавками под полозья 9,
перемещаются грузоиесущиекаретки 12, снабженные для возможности оцепления с захватами 8 зацепами 13 с 14, .подвижно закреплениыми на осях 15. Зацепы 13 шарнирно соединены с буферами 16 грузоиесущих кареток 12.
Для останова грузонесущих кареток 12 у рабочих мест на опорной раме 1 закреплены подпружиненные вы-ступы 17, а для регулирования |нодачи грузонесущих кареток 12 на верхние на правляющие 10 в «онце нижних направляющих установлен штырь 18,который при переводе каретки убирается с помощью электромагнита 19.
Предлагаемый вертикально-замкнутый конвейер работает следующим образом.
В.ключением привода 2 осуществляется движение тяговых цепей 4 с закрепленными между ними платформами 7, захваты 8 которых сцепляются с зацепами 13 грузонесущих кареток 12 и перемещают последиие.
Останов на рабочем месте каретки 12 при неорерывном движении платформ 7 осуществляется подпружиненным выступом 17, взаимодействующим с рычагом 14 и поворачивающим ось 15вместе с зацепом 13, 1который,поднимаясь, отсоединяет каретку 12 от движущейся платформы 1. Следующая каретка 12, подойдя к остановленной, передним буфером 16 иаталКИвается на задний буфер стоящей каретки, при этом происходит расцепление зацепа 13 с захватом 8 и отключение от движущейся платформы 7.
После окончания обработки изделия рабочий .ручным усилием сталкивает стоящую каретку 12 с выступа 17, что приводит к возврату в исходное положение зацепа 13, опускающегося вниз под действием собственного веса, к последующему сцеплению его с захватом 8 очередной проходящей платформы 7 и перемещению каретки 12 к следующему рабочему месту.
Переход каретки 12 с верхнего рабочего яруса на нижний, нерабочий, осуществляется леремещепием ее роликов 11 с конца верхних направляющих 10 на полозья 9 платформы 7, что обеспечивает на ней центрирование и фиксацию каретки в процессе перемещения последней с верхней направляющей 10 на нижнюю.
Движение каретки 12 по нижним направляющим 10 продолжается до соприкосновения со штырем 18.
При накоцлении кареток 12 на нижней иаправляющей отключение от тягового органа очередной каретки происходит при столкновении буферов 16, при этом происходит расцепление зацепа 13 с захватом 8.
Для перевода каретки 12 на верхние направляющие 10 освобождают рычаг 14 нижней направляющей .10 от воздействия штыря 18 с помогцью электромагнита 19, вследствие чего происходит возврат зацепа 13 в исходное положение, сцепление каретки 12 с очередной
проходящей платформой 7 и дальнейшее транспортирование каретки 12.
Предмет изобретения
1. Вертикально-замкнутый конвейер, содержащий опорную раму, .размещенные на -ней привод конвейера и перемещаемые по направляющим грузонесущие каретки на ходовых
роликах, связанные с тяговым органом привода конвейера посредством механизма сцепления, отличающийся тем, что, с целью обеспечения горизонтального положения кареток при работе конвейера, а также уменьшения тягового усилия, механизм сцепления выполнен в виде платформы с опорными роликами, закрепленными на тяговом органе, перемещаемой по дополнительным направляющим, установленны.м под направляющими каретки, и
сиаб/кенной установленным по ее центру захватом, выполненным в виде штыря с фигурной головкой, а каретка снабжена закрепленными на осях зацепами с рычагами, взаимодействующими с захватом платформы.
2. Конвейер по п. 1, отличающийся тем, что тяговый оргаи иривода конвейера выполиеп в виде двух параллельно расположенных цепей, огибающих KoiuieBbie звездочки, смещенные па величину, равную расстоянию между осями
ходовых роликов платформы.
3. Конвейер по пп. 1 и 2, отличающийся тем, что, с целью центрирования грузонесущей каретки на илатформе, ходовые ролики каретки выполнены с канавками по окружности под полозья, установленные на платформе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикально-замкнутый тележечный конвейер | 1986 |
|
SU1375531A1 |
| ГОРИЗОНТАЛЬНО-ЗАМКНУТЫЙ ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР | 1994 |
|
RU2090480C1 |
| СПОСОБ ПАРКОВКИ АВТОМОБИЛЕЙ В МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКЕ, МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА С ХРАНЕНИЕМ АВТОМОБИЛЕЙ НА ПОДДОНАХ, ПРИЁМНО-ПОВОРОТНЫЙ МЕХАНИЗМ ДЛЯ МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКИ С ПОДЪЁМНОЙ КЛЕТЬЮ, КЛЕТЬ ДЛЯ ТРАНСПОРТИРОВКИ ПОДДОНА ВНУТРИ МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКИ, МЕХАНИЗМ СИНХРОННОГО ГОРИЗОНТАЛЬНОГО ПЕРЕМЕЩЕНИЯ ГРУЗОНЕСУЩИХ КАРЕТОК КЛЕТИ, АВТОМОБИЛЬНЫЙ ПОДДОН | 2002 |
|
RU2208113C1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1997 |
|
RU2120012C1 |
| Конвейер с пространственной трассой | 1982 |
|
SU1094812A1 |
| КОНВЕЙЕР ДЛЯ ТРАНСПОРТИРОВАНИЯ ТЕЛЕГРАФНЫХ БЛАНКОВ | 1971 |
|
SU417348A1 |
| Вертикально-замкнутый конвейер | 1979 |
|
SU772937A1 |
| Горизонтально-замкнутый конвейер | 1977 |
|
SU685576A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОНЕСУЩЕГО СРЕДСТВА С ГРУЗОВОЙ ПЛАТФОРМЫ ПОДЪЕМНИКА НА ПЛОЩАДКУ ПОГРУЗКИ-РАЗГРУЗКИ | 1999 |
|
RU2152340C1 |
| Крутонаклонный ленточный конвейер | 1985 |
|
SU1305066A1 |

10
117 П 12
13 7
