1
Изобретение относится к области авто.матизации процессов на открытых горных работах, а именно к устройствам для определения производительности роторного экскаватора.
Известны устройства для определения производительности роторного экскаватора, включающие привод поворота роторной стрелы, датчик скорости поворота роторной стрелы, датчик высоты подуступа, датчик перемещения экскаватора, вычислительный блок и регистрирующий ирибор и датчик измерения текущего значения толщины стружки. Однако эти устройства сложны по своей конструкции и ненадежны в работе.
Целью изобретения является повыщение надежности устройства.
С этой целью к вычислительному блоку подключен множительный потенциометр, движок которого соединен с кривощипно-шатунным механизмом, кинематически связанным с приводом поворота роторной стрелы.
Сущность изобретения поясняется чертежом.
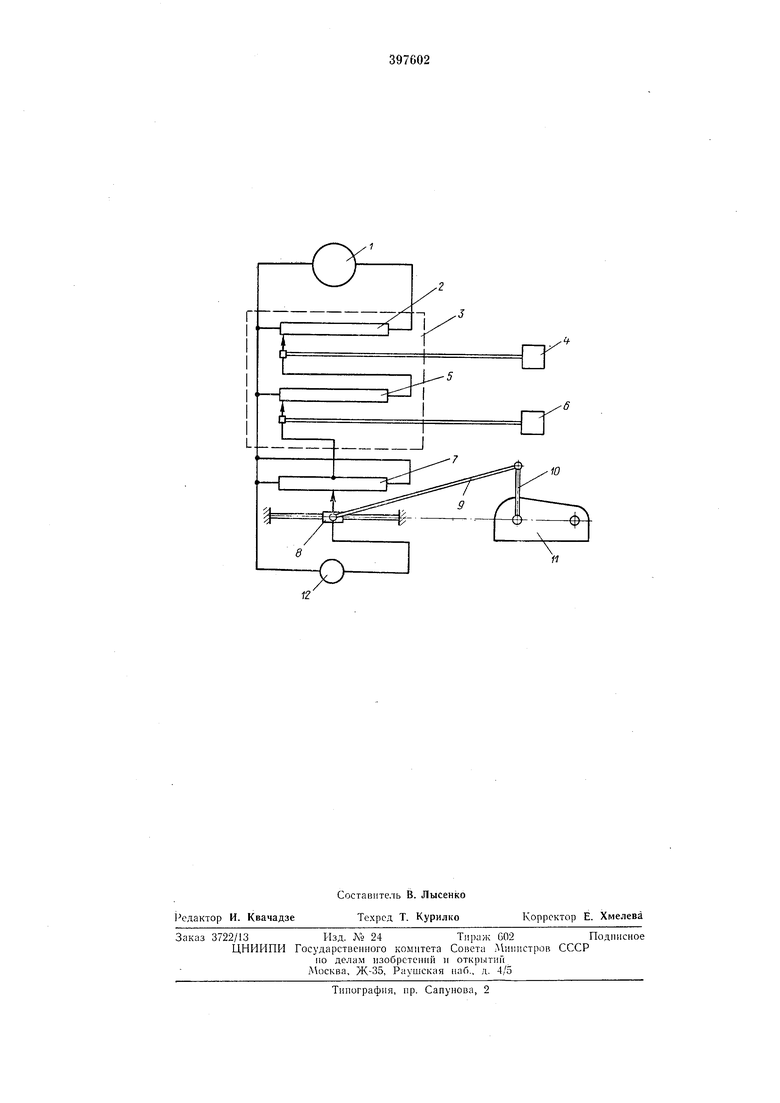
Устройство включает датчик скорости поворота роторной стрелы 1, подключенный на потенциометр 2 вычислительного блока 3. Движок потенциометра 2 механически соединен с датчиком высоты подуступа 4. К одному из зажимов датчика 1, являющемуся общей точкой всего устройства, и к движку потенциометра 2 подключен потенциометр 5, движок которого механически соединен с датчиком 6 перемещения экскаватора. К двнжку потенциометра 5 подключен средней точкой множительный потенциометр 7, начало и конец которого подключены на общую точку устройства. Движок множительного потенциометра 7 соединен с ползуном 8, который через щатун 9, кривошип 10 и редуктор 11 кинематически связан с приводом поворота роторной стрелы. Передаточное отношение редуктора 11 выбрано из условия равенства угловых скоростей вращения кривощипа 10 и роторной стрелы экскаватора. Для повыщения точности длина щатуна должна быть намного больше длины кривошипа. При поуглом ±-под
ложении роторной стрелы
к оси движения экскаватора движок множительного потенциометра 7 находится в среднем положении. К двнжку множительного потенциометра 7 и к общей точке подключен показываюндий ирибор 12.
Устройство работает следующим образом.
Напряжение, пропорциональное угловой скорости поворота роторной стрелы, с датчика 1 подается на нотенциометр 2. Движок потенциометра 2 перемещается при помощи датчика высоты иодусгупа 4 на величину, пропорциональную высоте подуступа. Папряжение между движком потенциометра 2 и общей точкой становится при этом пропорциональным произведению скорости поворота роторной стрелы и высоты подуступа и подается на потенциометр 5. Движок потенциометра 5 перемещается датчиком перемещения экскаватора 6 на величину, пропорциональную перемещению экскаватора при переходе от стружки в максимальном ее сечении. Напряжение между движком потенциометра 5 и общей точкой, т. е. на выходе вычислительного устройства 3 пропорционально произведению трех сомножителей - скорости иоворота роторной стрелы, высоте подуступа и толщине стружки в максимальном сечении. Это напряжение с вычислительного устройства 3 подается на множительный потенциометр 7. В исходном положении стрела роторного экскаватора повернута на угол ф - отсчитываемый от оси движения экскаватора, движок множительного потенциометра 7 находится в среднем положении, и выходное напряжение, снимаемое с двпжка и общей точки, равно нулю. По мере поворота стрелы экскаватора выходной вал редуктора 11 будет синхронно поворачивать кривошии 10, при этом с помощью щатуна.Э будет перемещаться ползун 8 с движком иотенциометра 7 с достаточной степенью точности в функции Таким образом, выходное напряжение вычислительного устройства 3 будет умножаться на косинус угла поворота роторной стрелы, отсчитываемый от оси экскаватора. При положении роторной стрелы по оси движения экскаватора (ф 0) движок множительного потенциометра 7 будет находиться в крайнем положении и выходное напряжение будет наибольшим, соответствующее наибольшей толщине стружки. При работе экскаватора при углах поворота роторной стрелы -- движок множительного потенциометра 7 перемещается по другой половине потенциометра также в функции созф. Таким образом, выходное напряжение, снимаемое с движка потенциометра 7 и с обпцей точки, пропорционально объемной производительности экскаватора в твердой массе, так как производительность, роторного экскаватора при условиях экскавации всего объема, описываемого режущими кромками ковшей, постоянства радиуса резания, разгрузки ковшей может быть выражена следующей зависимостью:Q 3600 cos-;, где Q - производительность роторного экскаватора в твердой массе, pes - радиус резания экскаватора, м; соп - угловая скорость поворота роторной стрелы; h - высота подуступа, м; 5о - толщина стружки в максимальном значении, м. Выходное напряжение, пропорциональное объемной производительности экскаватора, измеряется показывающим прибором 12, проградуированном в . Предмет изобретения Устройство для определения производительности роторного экскаватора, включающее привод поворота роторной стрелы, датчик скорости поворота роторной стрелы, датчик высоты подуступа, датчик перемещения экскаватора, вычислительный блок и регистрирующий прибор, отличающееся тем, что, с целью повышения падежности устройства, к вычислительному блок} подключен множительный потенциометр, движок которого соединен с кривошипно-шатунным механизмом, кинематически связанным с приводам поворота роторной стрелы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ С НЕВЫДВИЖНОЙ СТРЕЛОЙ | 1966 |
|
SU214641A1 |
| Устройство программного управления роторным экскаватором | 1979 |
|
SU870596A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ УСИЛИЯ РЕЗАИИЯ РАБОЧЕГО ОРГАНА РОТОРНОГО ЭКСКАВАТОРА | 1969 |
|
SU252937A1 |
| УСТРОЙСТВО для КОНТРОЛЯ РЕЖИМА РАБОТЫ МАШИН | 1971 |
|
SU290993A1 |
| ВСЕСОЮЗНАЯ IПЛТГНИ^ | 1971 |
|
SU310463A1 |
| Устройство для управления роторным экскаватором при планировке рабочей площадки | 1981 |
|
SU1040051A1 |
| Автоматизированная система управления рабочим процессом роторного экскаватора | 1985 |
|
SU1703797A1 |
| Устройство автоматического управления роторным экскаватором | 1972 |
|
SU446601A1 |
| Устройство для контроля и управления роторным экскаватором | 1984 |
|
SU1208135A1 |
| Устройство для автоматического регулирования положения ковша гидравлического экскаватора | 1985 |
|
SU1258958A1 |
10
