1
Изобретение относится « обработке металлов давлением и может быть использовано, в частности, для формирования режима торможения траверсы при автоматическом управлении гидравлическими прессами свободной ковки.
Известен регулятор, содержащий блок сравнения сигнала от задающего устройства и сигнала обратной связи датчика выходного пара.метра, связанный с усилителем, уп равляющпм рабочим и демпфирующим электродвигателями, на общий вал которых насажена шестерня, Воздействующая через зубчатый сектор на шток золотника следящего гидроусилителя, (нереключающего клапаны управления движением траверсы.
Однако статическая характеристика прессп нелинейна, а также учитывая, что скорость и путь цри 1равномврно-замедленнол1 движении находятся в квадратной зависимости, известный регулятор, обладающий линейной статической характеристикой, что подтверждается пра1ктическими испытаниями и теоретическими .расчетами, не может обеспечить высокую производительность труда.
Цель предлагаемого изобретения - повышение производительности пресса и повыщеиио
точности КОВКИ.
Для этого датчИК выходного пар а.метр а снабжен узлом переналаживаемой обратной
связи, выполненным в эиде размещенного на щтоке золотника следящего гидроусилителя профильного лекала и скользящего по его профильной поверхиости рычага, закреплепного на оси датчика выходного параметра. При этом профиль левой и правой частей лекала, состоящего из трех частей, крайние из которых выполнены в виде кривой изменения квадрата скорости траверсы в зависимости от
величины перемещения штока золотника, а профиль средней части, составляющей 0,03- 0,05 от рабочей длины лекала, выполнен в виде прямой линии, проведенной под углом 5-45° к линии направления перемещения лекала.
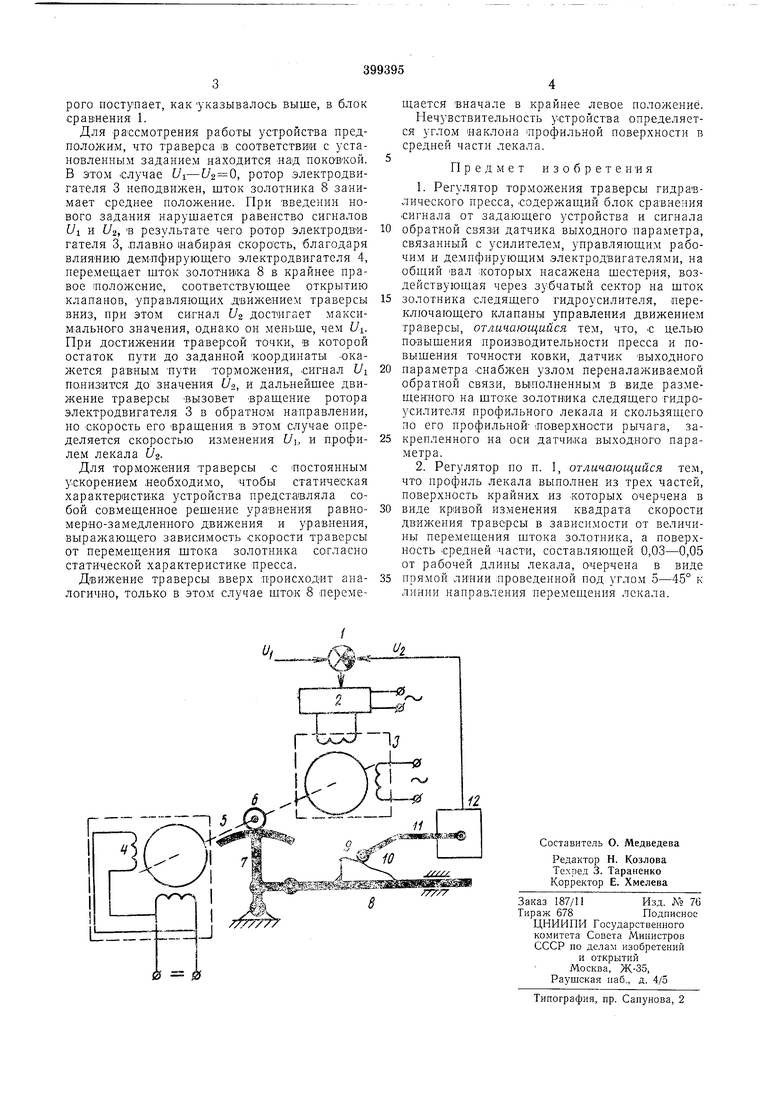
На чертеже изображено предлагаемое устройство.
Выходной сигнал (Ui) и сигнал обратной связи (U.,) ноступают в блок сравнения 1,
разность этих сигналов, усиленная усилителем 2, управляет электродвигателем 3, связанным с демпфирующим электродвигателем 4 общим вало.м 5, на которо.м сидит шестерня 6, преобразующая посредством сектора 7 вращение
ротора электродвигателя 3 в линейное пере.мещение штока золотника следящего гидроусилителя 8, вместе с которы.м неремещаегся лекало 9, ::io профильной поверхности .которого катится ролик 10 рычага 11, сидящего ia оси
датчика 12, электрический сигнал (U-2) «ото
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический усилитель системы управления гидравличесим прессом | 1976 |
|
SU582995A1 |
| Регулятор торможения поперечины гидравлического пресса | 1976 |
|
SU597574A1 |
| Регулятор торможения подвижной поперечины гидравлического пресса | 1976 |
|
SU648446A1 |
| Регулятор торможения поперечины гидравлического пресса | 1978 |
|
SU727477A1 |
| Устройство для управления транспортным средством с дизельным двигателем | 1980 |
|
SU905133A2 |
| Электрогидравлическая следящая система | 1979 |
|
SU875334A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| БИБЛИОТЕКА i | 1971 |
|
SU298692A1 |
| Регулятор торможения поперечиныгидРАВличЕСКОгО пРЕССА | 1979 |
|
SU821206A1 |
