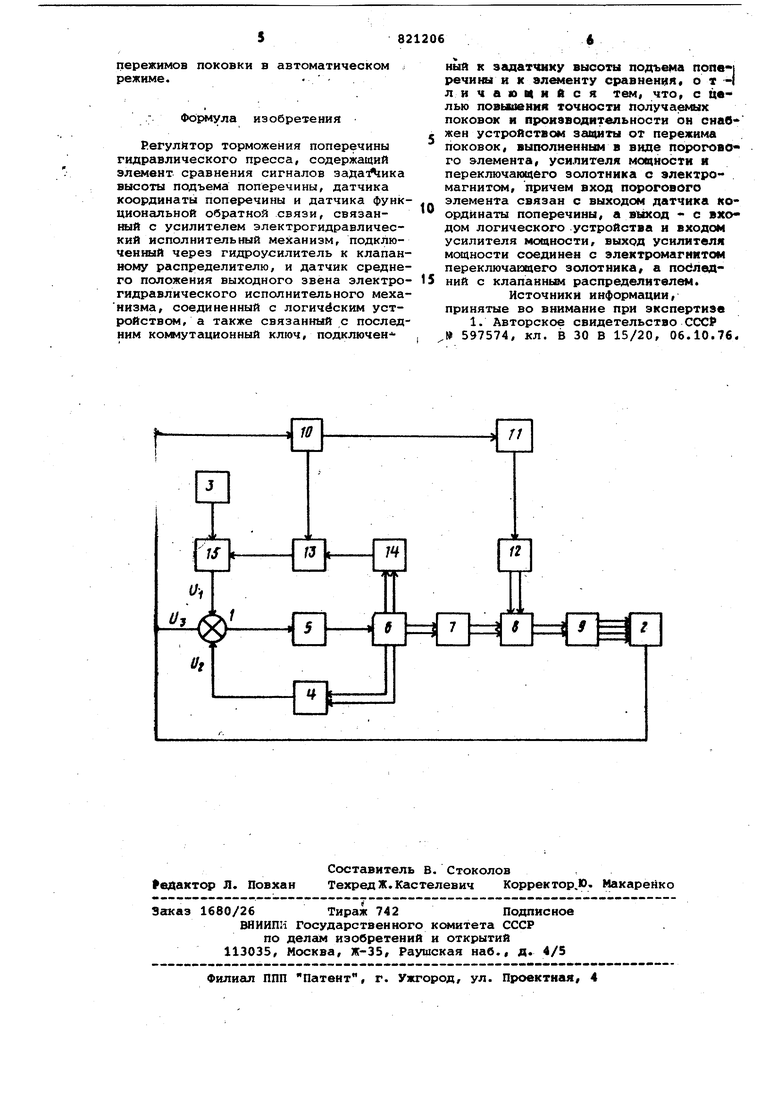
Изобретение относится к машиностроению, в частности к конструкции систем управления гидропрессами, Известен регулятор торможения поперечины гидравлического пресса, содержащий элемент.сравнения сигналов эадатчика высоты подъама поперечины, датчика координаты поперечины и датчика функциональной обратной связи, связанный с усилителем электрогидравлический исполнительный механизм, подключенный через гидроусилитель к клапанномураспределителю, и датчик среднего положения выходного звена электрогидравлического исполнительного механизма, соединенный с логическим устройством, а также .связанный с последним коммутационный ключ, подключенный к зё1датчику высот подъема поперечины и к элементу срав нения ij . Недостатками известного регулятора являются отсутствие защиты от пережимов поковок при неисправностях в усилителе и исполнительном механи ме, а следовательно, снижение произ 1водительности пресса и недостаточная точность получаемых поковок. Цель изобретения - повьшение точности получаеколх поковок и производительности. Эта цель достигается тем, что регулятор торможения поперечины гидравлического пресса снабжен устройством защиты от пережима поковок, выполненным в виде порогового элемента, усилителя мощности и переключа эщего золотника с электромагнитом, причем вход порогового элемента связан с выходом датчика,координаты поперечины, а вы- . ход - с входом логического устройства и входом усилителя мощности, выход усилителя мощности соединен с электромагнитом переключающего золотника, а последний связан с клапанным распределителем. Наличие блока засшты от пережима поковок в регуляторе позволяет в момент перехода поперечины через нижнюю заданную точку перекрыть подачу высокого давления в рабочие цилиндры пресса и остановить поперечину, что исклю чает пережим поковки и обеспечивает путем воздействия на логическое устройство перевод пресса с автоматичес.кого на ручной режим управления. На чертеже представлена блок-схема ,регулятора.
Схема регулятора состоит из элемента 1 сравнения, на вход которого поступают сигналы с датчика 2 координаты подвижной поперечины, задатчика 3 высоты подъема поперечины, датчика 4 функциональной обратной связи. Выход элемента 1 сравнения связан с усилителем 5, управляющим электрогидравлическим исполнительным механизIMOM 6, связанным с датчиком 4 функциональной обратной связи и воздействующим на шток золотника гидроусилителя 7, который управляет клапанами распределителя 8 пресса 9. Блок защиты от пережима заготовок состоит из порогового элемента 10, вход которого связан с датчиком 2 координаты поперечины, усилителя мощности 11 и переключающего золотника 12 с электромагнитом, воздействующим на клапаны подачи высокого давления распределителя 8.- Логическое устройство 13 по сигналу порогового элемента 10 переводит систему управления прессом в ручной режим, а по си-гналу от датчика 14 среднего положения, закреленного на штоке золотника гидроусилителя 7, управляет коммутационным ключом. 15, вход которого подключен к задатчику 3 высоты подъема поперечины, а выход - на один из входов элемента 1 сравнения.
Регулятор работает следующим образом.
В исходном состоянии поперечина находится в нижней точке соответствущей заданному размеру поковки. При этом сигналы U, U2 и U соответствено с задатчика 3 высоты подъема поперечины, датчика 4 функциональнор5 обратной связи по высоте подъема клапанов распределителя 8 и датчика 2 координаты равны нулю, электрогидрав лический исполнительный механизм б неподвижен,, шток золотника гидроусилителя 7 занимает среднее положение. Логическое устройство 13 выдает команду на движение вверх и на замыкание ключа 15. При введении задания высоты подъема поперечины задатчиком3 на входе элемента 1 сравнения появляется сигнал U, и,воздействуя через усилитель 5 на электрогидравлический исполнительный механизм б, вызывает перемещение штока золотника гидроусилителя 7 в крайнее положение, соответствующее открытию клапанов распределителя В на движение поперечины пресса 9 вверх. На элемент 1 сравнения в противофазе сигналу (i поступает сигнал Ug с датчика 4 и сигнал и 3 с датчика 2. По мере подъема поперечины сигнал U-j возрастает и при и( () в результате изменения фазй сигнала с элемен а сравнения шток золотника гидроусилителя 7 под действием электрогидравлического исполнительного механизма б в режиме слежения за убывающей разностью
U,j-(U2+U) начнет перемещаться к среднему положению, вызывая закрытие клапанов и торможение поперечины. Сигнал и при этом также убывает.- При достижении поперечиной верхней заданной точки , и шток золотника Возвратится в среднее положение, клапаны полностью закроются, и поперечина остановится в заданной точке. Одновременно с датчика 14 среднего положения поступает сигнал, соответствующий приходу поперечины вверх. При этом логическое устройство формирует сигнал на размыкание ключа 15, в результате чего на элемент 1 сравнения поступают только сигналы .и 2 и Uj. Электрогидравличес1 ий исполнительный механизм 6 перемещает , шток золотника гидроусилителя 7 в положение, соответствующее открытию клапанов на движение поперечины вниз. Сигнал и «5 уменьшается, и при равенстве его сигналу Ug происходит изменение фазы резуль.тирующего сигнала с блока 1 сравнения. В режиме слежения за убывающим сигналом гидроусилитель 7 закрывает клапаны и понижает скорость движения поперечины. При достижении поперечиной нижней заданной точки с датчика 14 среднего положения поступает соответствующий сигнал в логическое устройство 13, которое подает команду на замыкание ключа 15. Сигнал 0 задатчика 3 высоты подъема поперечи«ы вновь поступает на вход элемента 1. Цикл повторяется.
В случае неисправности в электрогидравлическом исполнительном механизме б или выходе из строя усилителя 5 в логическом устройстве 13 не будет сформирована команда на реверс поперечины или она не будет выполнена электрогидравлическим исполнительным механизмом 6, следовательно, при приближении поперечины к нижней заданной точке не произойдет закрывания клапанов подачи высокого давления, и поперечина будет продолжать обжатие поковки. Но сигнал и с Датчика 2 координаты поперечины при переходе через нунулевое значение в нижней заданной точке поперечины включает пороговьЛ элемент Ю, сигнал с которого, усилителем мощности 11, подключит электромагнит переключающего золотника 12, VI клапаны подачи высокого давления закроются, а поперечина остановится. Сигнал с порогового элемента 10 поступает также в логическое устройство 13, которое переключит систему на ручной режим управления прессом 9. Дальнейший переход на автоматический режим возможен после уст анения неисправностей.
Использование предлагаемого регулятора обеспечивает повышение производительности пресса и точность ковки вследствие уменьшения брака от пережимов поковки в автоматическом режиме. ; Формула изобретения Регулйтор торможения поперечины гидравлического пресса, содержащий элемент сравнения сигналов эадао ика высоты подъема поперечины, датчика координаты поперечины и датчика функ циональной обратной связи, связангалй с усилителем электрогидравлический исполнительный механизм, подключенный через гидроусилитель к клапан ному распределителю, и датчик средне го положения выходного звена электро гидравлического исполнительного меха °низма, соединенный с логическим устройством, а также связанный с послед ним ко1«1утационный ключ, подключен- вый к эадатчнку высоты подъема none-i речины и к ал&леиту сравнения, о т -i л и ч а ю ц и и с я тем что, с лью пов1Л11ения точности получаемых поковок и производительности он жен устройством защиты от пережима поковок, выполненным в виде порогоао го элемента, усилителя мощности я переключающего золотника с электромагнитом, причем вход порогового элемента связан с выходом датчика координаты поперечины, а выход - с вхо« дом логического устройства и входом усилителя мощности, выход усилителя мощности соединен с электромагнитом переключа1эщего золотника, а последНИИ с клапанным распределителем. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 597574, кл. В 30 В 15/20, 06.10.76.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления гидравлическимпРЕССОМ | 1979 |
|
SU821204A1 |
| Система управления гидравлическимпРЕССОМ | 1979 |
|
SU821205A1 |
| Регулятор торможения поперечины гидравлического пресса | 1979 |
|
SU774967A1 |
| Регулятор торможения поперечины гидравлического пресса | 1979 |
|
SU856860A1 |
| Регулятор торможения поперечины гидравлического пресса | 1979 |
|
SU770841A1 |
| Регулятор торможения поперечины гидравлического пресса | 1976 |
|
SU597574A1 |
| Система управления гидравлическим прессом | 1980 |
|
SU903212A1 |
| Система управления гидравлическим прессом | 1980 |
|
SU903213A1 |
| Регулятор торможения поперечины гидравлического пресса | 1978 |
|
SU727477A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1991 |
|
RU2010108C1 |
