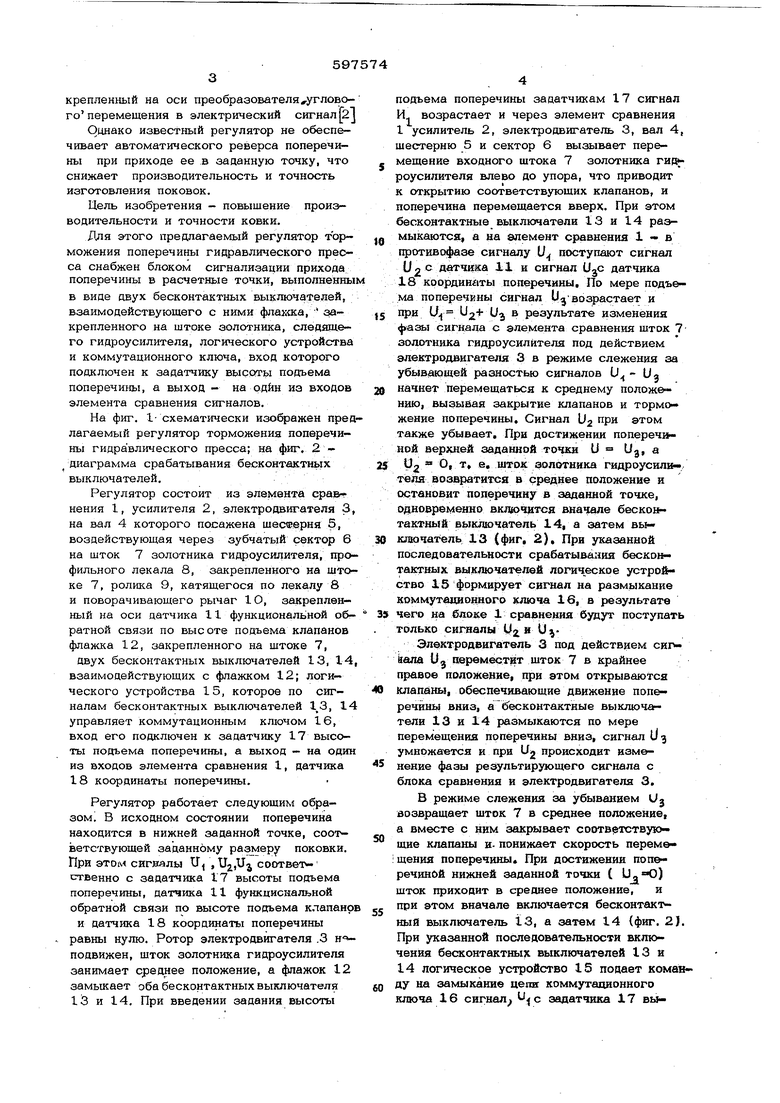
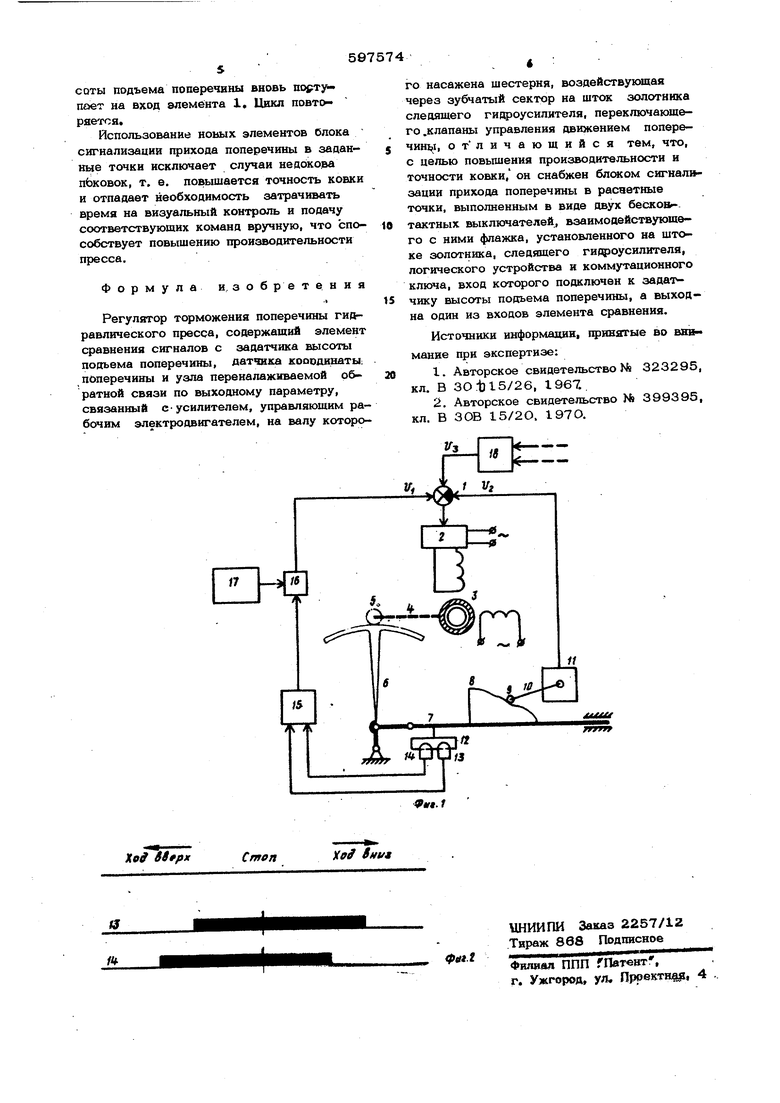
крепленный на оси преобразователя,углового перемещения в электрический сигнал 2 Оцнако известный регулятор не обеспечивает автоматического реверса поперечины при приходе ее в заданную точку, что снижает производительность и точность изготовления поковок. Цель изобретения - повышение производительности и точности ковки. Лля этого предлагаемый регулятор тор- можения поперечины гидравлического пресса снабжен блоком сигнализации прихода поперечины в расчетные точки, выполненны в виде двух бесконтактных выключателей, взаимодействующего с ними флахоса, закрепленного на штоке золотника, следящего гидроусилителя, логического устройства и коммутационного ключа, вход которого подключен к задатчику высоты подъема поперечины, а выход - на один из входов элемента сравнения сигналов. На фиг. 1- схематически пре лагаемый регулятор торможения поперечины гидравлического пресса; на фиг, 2 диаграмма срабатывания бесконтактньгх выключателей. Регулятор состоит из элемента срав нения 1, усилителя 2, электродвигателя 3 на вал 4 которого посажена шесферня 5, воздействующая через зубчатый сектор 6 на шток 7 золотника гидроусилителя, про фильного лекала 8, закрепленного на што ке 7, ролика 9, катящегося по лекалу 8 и поворачивающего рычаг 10, закрепленный на оси датчика 11 функциональной обг ратной связи по вые оте подъема клапанов флажка 12, закрепленного на штоке 7, двух бесконтактных выключателей 13, 14 взаимодействующих с флажком 12; логического устройства 15, которое по сигналам бесконтактных выключателей 1,3, 14 управляет коммутационным ключом 16, вход его подключен к задатчику 17 высоты подъема поперечины, а выход - на один из входов элемента сравнения 1, датчика 18 координаты поперечины. Регулятор работает следующим образом В исходном состоянии поперечина находится в нижней заданной точке, соответствующей заданному pasjMepy поковки. При этом сигналы U , соотве ственно с за датчика 17 высоты подъема поперечины, датчика 11 функциональной обратной связи по высоте подъема клапано и датчика 18 координаты поперечины равны нулю. Ротор электродвигателя .3 н подвижен, шток золотника гидроусилителя занимает среднее положение, а флажок 12 замыкает оба бесконтактных выключатеяя 13 и 14. При введении задания высоты подъема поперечины задатчикам 17 сигнал И возрастает и через элемент сравнения 1 усилитель 2, электродвигатель 3, вал 4, шестерню 5 и сектор 6 вызывает перемещение входного штока 7 золотника гидь. роусилителя влево до упора, что приводит к открытию соответствующих клапанов, и поперечина перемешается вверх. При этом бесконтактные выключатели 13 и 14 размыкаются, а на элемент сравнения 1 - в противофаае сигналу U поступают сигнал и 2 датчика И и сигнал UjC датчика 18 координаты поперечины. По мере подъ&ма поперечкны сигнал М возрастает и при и U2+ УЗ в результате изменения сигнала с элемента сравнения шток 7 золотника гидроусилителя под действием электродвигателя 3 в режиме слежения за убывающей разностью сигналов U - Uj начнет перемещаться к среднему полож&нию, вызывая закрытие клапанов и торможение поперечины. Сигнал Uj при этом также убывает. При достижении поперечиной верхней заданной точки U Ug, а Ug О, т е, шток золотника гидроусилителя возвратится в среднее положение и остановит поперечину в заданной точке, одноврем 1но вкл(очится вначале бесконтактный выключатель 14, а затем выключатель 13 (фиг. 2). При указанной последовательности срабатывания бесконтактных выключателей логич еское устройство 15формирует сигнал на размыкание коммутадионного ключа 16, в результате чего на блоде 1 сравнения будут поступать только сигналы4/2 в и ) Электродвигатель 3 под действием сипаала Uj иервместит шток 7 в крайнее правое положение, при этом открываются клапаны, обеспечивающие движение поперечины вниз, а б есконтактные выключатели 13 и 14 размыкаются по мере перемещения поперечины вниз, сигнал U умножается и при LJ происходит изменение фазы результирующего сигнала с блока сравнения и электродвигателя 3. В режиме слежения за убыванием Uj возвращает шток 7 в среднее положение, а вместе с ним закрывает соответствующие клапаны и. понижает скорость перемещения поперечины При достижении поп&« речиной нижней заданной точки ( Ug-O) шток приходит в среднее положение, и при этом вначале включается бесконтактный выклкэтатель 13, а затем 14 (фиг. 2). При указанной последовательности включения бесконтактных выключателей 13 и 14 логическое устройство 15 подает команду на замыкание цепи коммутационного ключа 16 cигнaл Jjc задатчика 17 вы-
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор торможения поперечины гидравлического пресса | 1978 |
|
SU727477A1 |
| Регулятор торможения поперечиныгидРАВличЕСКОгО пРЕССА | 1979 |
|
SU821206A1 |
| Регулятор торможения поперечины гидравлического пресса | 1979 |
|
SU774967A1 |
| Регулятор торможения поперечины гидравлического пресса | 1979 |
|
SU856860A1 |
| Регулятор торможения поперечины гидравлического пресса | 1979 |
|
SU770841A1 |
| Регулятор торможения подвижной поперечины гидравлического пресса | 1976 |
|
SU648446A1 |
| Система управления гидравлическимпРЕССОМ | 1979 |
|
SU821204A1 |
| Система управления гидравлическимпРЕССОМ | 1979 |
|
SU821205A1 |
| Устройство для управления камнераспиловочным станком | 1986 |
|
SU1337269A1 |
| Система управления гидравлическим прессом | 1980 |
|
SU903213A1 |
