1
Известны токарные автоматы, в которых V-образная траверса, расположенная над шпинделями, снабжена направляющими для суппортов.
Предлагаемый токарный автомат, нанример шпиндельный, предназначен для обработки деталей типа валов в центрах и имеет жесткую конструкцию, удобную для встраивания в автоматическую линию.
Это достигается тем, что станина станка нанротив шпиндельной бабки снабжена стойкой, а Y-образная траверса соединяет ее со шпиндельной бабкой и несет на своих нродольных нанравляюших независимо приводимые рабочие суппорта и заднюю бабку, оснап;енную нинолями. Непосредственно в автомат встроены приводы транспортных средств.
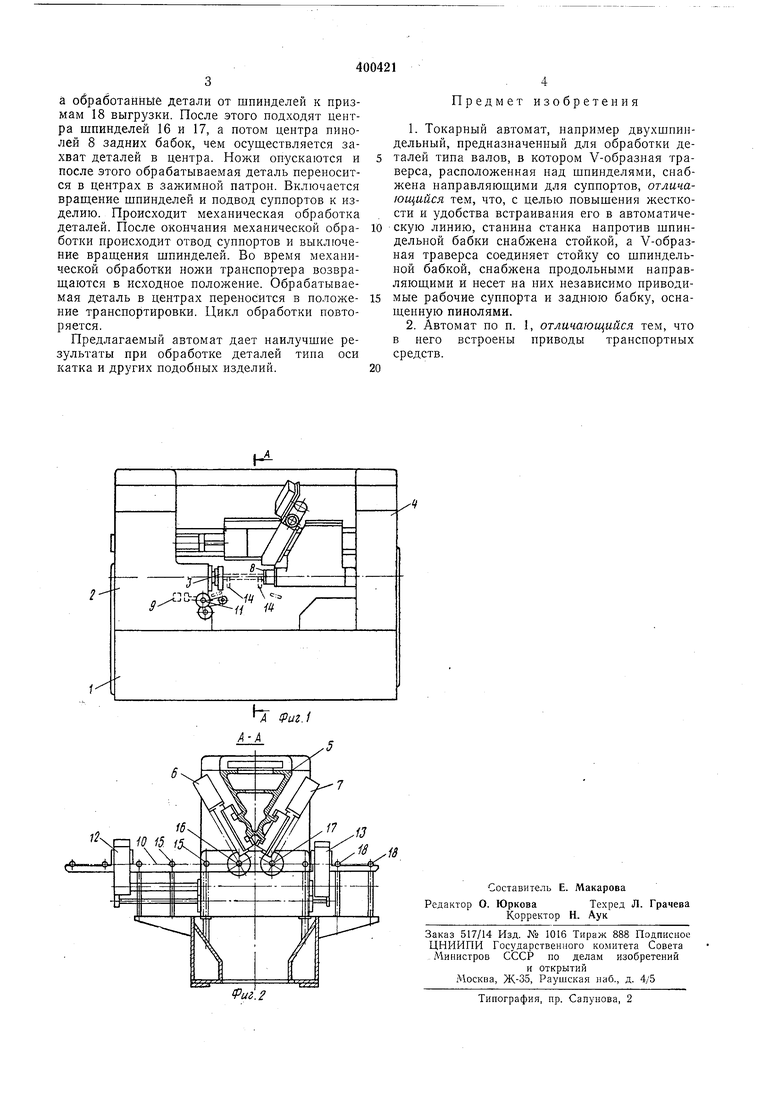
На фиг. 1 изображен предлагаемый станок, обш.ий вид; на фиг. 2 - разрез по А-А на фиг. 1.
Станина 1 является базой, на которой монтируются основные узлы автомата. Передняя бабка 2 установлена на основании вместе с вмонтированными в нее шпинделями 3. Снрава на основании установлена стойка 4. На верхних плоскостях передней бабки и стойки находится траверса 5. Траверса имеет направляюш;ие, по которым перемещаются суппорта 6 и 7 (фиг. 2), а также на них покоятся задние бабки с пинолями 8. Задние бабки имеют
наладочные перемещения по направляющим. Суппорта 6 и 7 применяются для обточки изделий поверху как для гладких, так и для ступенчатых валов (применяется однокоординатная гпдрокопировальная система), для поперечного точения при подрезке торнов и другие. Вращение шпинделей осуществляется от электродвигателя, расположенного иод передней бабкой в основании. Перемещение суппортов производится от гидропилиндров. Их насосная станция расположена под стойкой 4 в станине. Система гидроуправления размещена на верхней нлоскостн траверсы под крыщкой. В передней бабке 2 вмонтированы: гидроцилиндр 9 поворота ножей транснортера 10, поворот происходит от поворотного вала 11, цилиндр нродольного .хода транснортера 10, штоки которого закреплены непосредственно за щеки транспортеров 12 и 13.
Поднимаются ножи 14 транспортера 10 от поворотпого вала 11 и захватывают обрабатываемые детали, которые ложатся в призмы 15 ножей. После этого отходят ниноли 8 задних бабок, а за IUJMH центра 16 н 17 шпинделей передней бабки. Транспортер получает продольное неремещение на два шага (для одновременной обработки двух деталей и на один шаг при обработки различных технологических операций) н нереносит обрабатываемые детали с призм 15 загрузки к шпинделям,
а обработанные детали от шпинделей к призмам 18 выгрузки. После этого подходят центра шпинделей 16 и 17, а потом центра пинолей 8 задних бабок, чем осуществляется захват деталей в центра. Ножи опускаются и после этого обрабатываемая деталь переносится в центрах в зажимной патрон. Включается вращение щпинделей и подвод суппортов к изделию. Происходит механическая обработка деталей. После окончания механической обработки происходит отвод суппортов и выключение вращения щпинделей. Во время механической обработки ножи транспортера возвращаются в исходное положение. Обрабатываемая деталь в центрах переносится в положение транспортировки. Цикл обработки повторяется.
Предлагаемый автомат дает наилучшие результаты при обработке деталей типа оси катка и других подобных изделий.
4 Предмет изобретения
1.Токарный автомат, например двухщпиндельный, предназначенный для обработки деталей типа валов, в котором V-образная траверса, расположенная над щпинделями, снабжена направляющими для суппортов, отличающийся тем, что, с целью повыщения жесткости и удобства встраивания его в автоматическую линию, станина станка напротив шпиндельной бабки снабжена стойкой, а V-образная траверса соединяет стойку со щпиндельной бабкой, снабжена продольными направляющими и несет на них независимо приводимые рабочие суппорта и заднюю бабку, оснащенную пинолями.
2.Автомат по п. 1, отличающийся тем, что в него встроены приводы транспортных средств.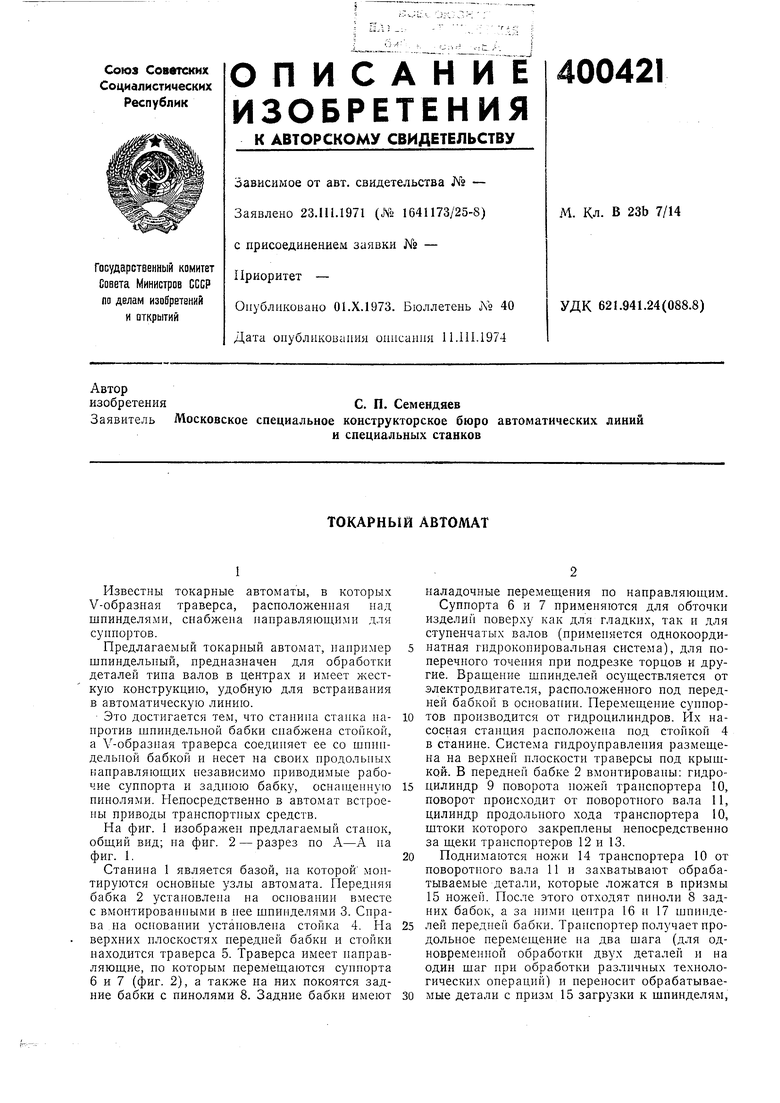
| название | год | авторы | номер документа |
|---|---|---|---|
| Токарный автомат | 1990 |
|
SU1824255A1 |
| Гибкий токарный модуль | 1987 |
|
SU1551515A1 |
| СПОСОБ КОПИРОВАЛЬНОЙ ОБРАБОТКИ, КОПИРОВАЛЬНЫЙ ТОКАРНО-ФРЕЗЕРНЫЙ СТАНОК "КТФ-1 МЕК" | 2007 |
|
RU2368484C2 |
| ТОКАРНЫЙ ГОРИЗОНТАЛЬНЫЙ МНОГОШПИНДЕЛЬНЫЙАВТОМАТ | 1971 |
|
SU305960A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ КОЛЕСНЫХ ПАР | 1992 |
|
RU2011475C1 |
| Автомат для обработки изделий | 1982 |
|
SU1174233A1 |
| Станок для обработки деталей магнито-абразивным порошком | 1977 |
|
SU776889A1 |
| Автомат токарный вертикальный двухшпиндельный | 1990 |
|
SU1834751A3 |
| ТОКАРНО-ОБТОЧНОЙ СТАНОК | 1973 |
|
SU395183A1 |
| НАСТОЛЬНЫЙ МНОГОЦЕЛЕВОЙ СТАНОК | 1994 |
|
RU2089383C1 |
