1
Изобретение относится к области судостроения и предпазначено для проверки и регулировки авторулевых на судах всех классов без выхода в море.
Известно устройство, в котором применен способ воздействия на вход усилителя следящей системы бортового гидрокомнаса.
Однако оно пригодно только для судов, оборудованных авторулевым АТР и гирокомпасом КУРС-4, не предусмотрена возможность задания величины угла ухода судиа с курса. Изменение стороны ухода с курса производится вручную, нутем переключения проводников, при этом должен включаться и выключаться гирокомпас.
Цель изобретения - увеличение точности устройства.
В предложенном устройстве это достигается путем вмонтирования электродвигателя постоянного тока, скорость которого регулируется, и сельсиг -датчнка с автономным питанием. С номон1,ью такого устройства можно задавать авторулевому угол ухода судна с курса, нрнчем величина и скорость ухода с курса калнбропаны с необходимой стененью точности, а также регулируется по величине и обеспечивается автоматическое изменение стороны ухода с курса.
Принципиальная электрическая схема предложеиного устройства приведена на
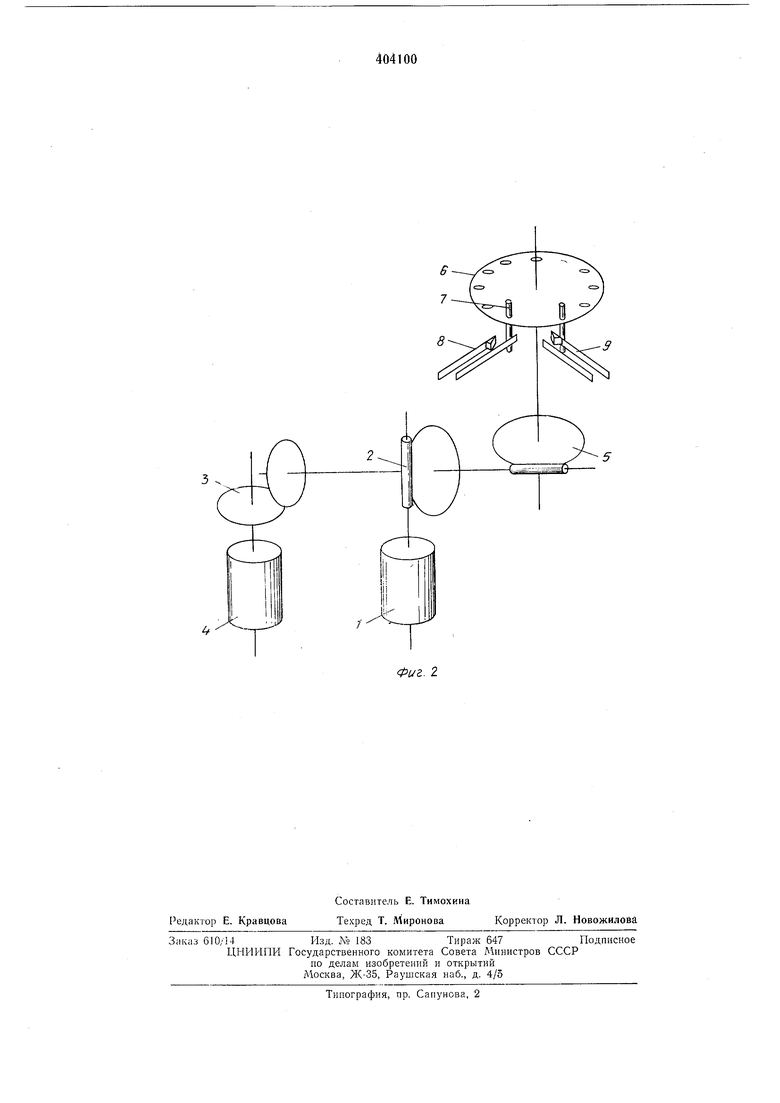
фиг. 1, а на фиг. 2 показана его кинематическая схема.
Устройство состоит из электродвигателя постоянного тока 1, связанного посредством
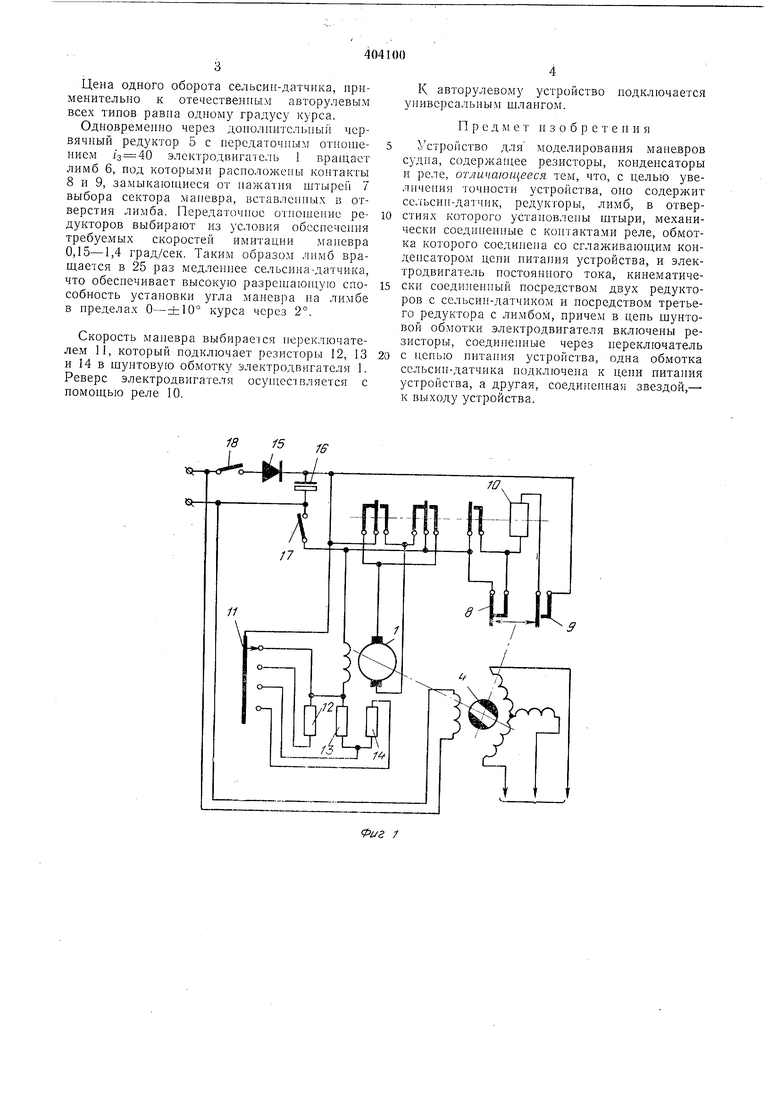
редукторов 2 и 3 (фиг. 2) с сельсин-датчиком 4 и через редуктор 5 - с лимбом 6, в отверстиях которого расположены штыри 7, механически связан1тые с контактами 8 и 9, включенными в цень реле 10.
Для управлепия скоростью маневра предусмотрен переключатель 11, одной фазой подключенный к цени питапия, а другой - к резисторам 12, 13 и 14, включенным в шунтовую обмотку электродвигателя 1. Цепь питаНИИ постоянным током состоит из последовательно включенных диода 15 и сглаживающего конденсатора 16, к ним же носледовательно нодключен выключатель 17 маневра. Для включения и выключения всего прибора
предусмотрен выключатель 18.
Прн подаче питания выключателем 18 от сети 110 в, 50 ГЦ через полупроводииковый диод 15 и сглаживающий конденсатор 16 получаст питание электродвигатель 1, вращающпй через червячный редуктор 2 с передаточным отношением ii 40 и конический редуктор 3 с передаточным отношением ,66 сельсии-датчик 4 (фиг. 1), который выдает
сигнал в авторулевой.
Цена одного оборота сельсин-датчика, применительно к отечественным авторулевым всех типов равна одному градусу курса.
Одновременно через донолнитсльнын червячный редуктор 5 с передаточным отношением электродвигатель I вращает лимб 6, под которыми расположены контакты 8 и 9, замыкающиеся от нажатия HiTbipeii 7 выбора сектора маневра, вставлеппых в отверстия лимба. Передаточпое отношение редукторов выбирают из условия обсспечепия требуемых скоростей имитации .маневра 0,15-1,4 град/сек. Таким образом лимб вращается в 25 раз медленнее сельсина-датчика, что обеспечивает высокую разрешаюндую способность установки угла маневра па лимбе в пределах О-dzlO° курса через 2°.
Скорость маиевра выбирается переключателем 11, который подключает резисторы 12, 13 и 14 в щунтовую обмотку электродвигателя 1. Реверс электродвигателя осуп;ествляется с помощью реле 10.
К авторулевому устройство
подключается универсальным шлангом.
П р е д м е и 3 о б р с т е п и я
Устройство для моделнровапия маневров судна, содержагцее резисторы, конденсаторы и реле, отличающееся тем, что, с целью увеличения точности устройства, оно содержит сельсин-датчик, редукторы, лимб, в отверстиях которого установлены штыри, механически соединенные с контактами реле, обмотка которого соединена со сглаживающим конденсатором цени питания устройства, и электродвигатель постоянного тока, кинематически соединенный посредством двух редукторов с сельсин-датчиком и носредством третьего редуктора с лимбом, причем в цепь шунтовой обмотки электродвигателя включены резисторы, соединенные через переключатель
с цепью питания ус7ройства, одна обмотка сельсин-датчика подключена к цени питания устройства, а другая, соединенная звездой,- к выходу устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОРУЛЕВОЙ | 1962 |
|
SU147104A1 |
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| Автоматический стабилизатор курса судов | 1959 |
|
SU126383A1 |
| СУДОВОЙ АВТОРУЛЕВОЙ «СИНИЦА» | 1966 |
|
SU179639A1 |
| Устройство для моделирования динамических свойств судна | 1973 |
|
SU590175A1 |
| Авторулевой | 1979 |
|
SU842725A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| ВИЗУАЛЬНЫЙ МАГНИТНЫЙ КОМПАС-ДАТЧИК | 1995 |
|
RU2098759C1 |
| АВТОРУЛЕВОЙ ДЛЯ СУДОВ | 1969 |
|
SU254356A1 |
| ОПЫТОВЫЙ МОРСКОЙ МОДУЛЬНЫЙ КОМПЛЕКС | 2021 |
|
RU2760823C1 |