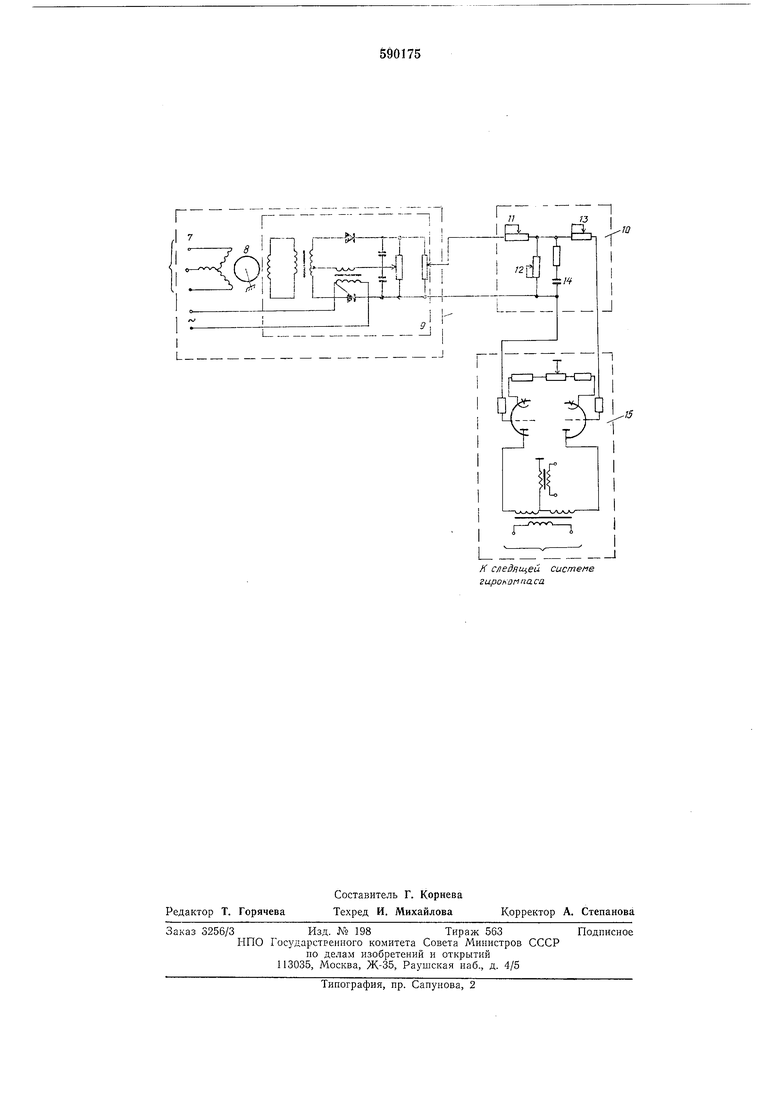
тов. в зависимости от типа судна, на котором установлен испытываемый авторулевой, и от имитируемого режима плавания (скорость хода, осадка судна), устанавливается величина резисторов И-13.
Напряжение, имитирующее внешние возмущения, действующие на судно в море (волны, ветер), может быть подано в виде сигналов переменного тока на дополнительную обмотку выходного трансформатора модулятора, либо в виде сигналов постоянного тока на сетки его лампы.
Устройство работает следующим образом.
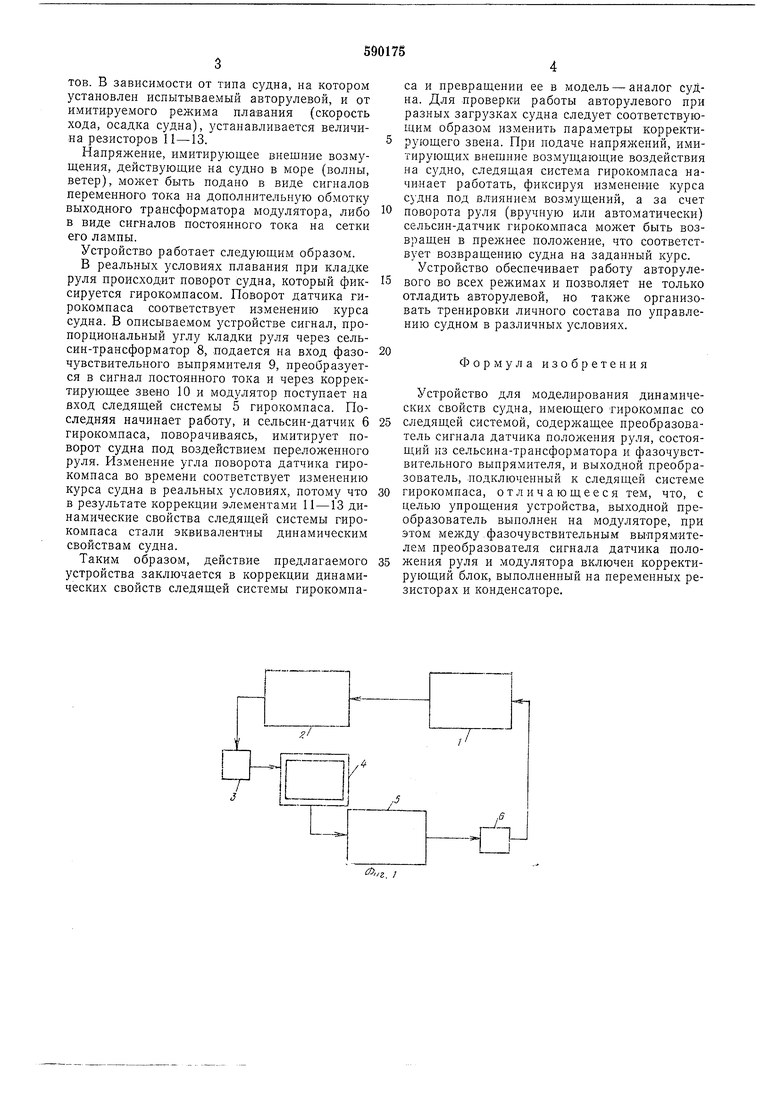
В реальных условиях плавания при кладке руля происходит поворот судна, который фиксируется гирокомпасом. Поворот датчика гирокомпаса соответствует изменению курса судна. В описываемом з стройстве сигнал, пропорциональный углу кладки руля через сельсин-трансформатор 8, подается на вход фазочувствительного выпрямителя 9, преобразуется в сигнал достоянного тока и через корректирующее звено 10 и модулятор поступает на вход следящей системы 5 гирокомпаса. Последняя начинает работу, и сельсин-датчик 6 гирокомпаса, поворачиваясь, имитирует поворот судна иод воздействием переложенного руля. Изменение угла поворота датчика гирокомпаса во времени соответствует изменению курса судна в реальных условиях, потому что в результате коррекции элементами 11-13 динамические свойства следящей системы гирокомпаса стали эквивалентны динамическим свойствам судна.
Таким образом, действие предлагаемого устройства заключается в коррекции динамических свойств следящей системы гирокомпаса и превращении ее в модель - аналог судна. Для проверки работы авторулевого при разных загрузках судна следует соответствующим образом изменить параметры корректирующего звена. При подаче напряжений, имитирующих внешние возмущающие воздействия на сулно, следящая система гирокомпаса начинает работать, фиксируя изменение курса судна под влиянием возмущений, а за счет поворота руля (вручную или автоматически) сельсин-датчик гирокомпаса может быть возвращен в прежнее положение, что соответствует возвращению судна на заданный кзфс.
Устройство обеспечивает работу авторулевого во всех режимах и позволяет не только отладить авторулевой, но также организовать тренировки личного состава ио управлению судном в различных условиях.
Формула изобретения
Устройство для моделирования динамических свойств судна, имеющего гирокомпас со следящей системой, содержащее преобразователь сигнала датчика пололсения руля, состоящий из сельсина-трансформатора и фазочувствительного выпрямителя, и выходной преобразователь, подключенный к следящей системе гирокомпаса, отличающееся тем, что, с целью упрощения устройства, выходной преобразователь выполнен на модуляторе, при этом между .фазочувствительным выпрямителем преобразователя сигнала датчика положения руля и модулятора включен корректирующий блок, выполненный на переменных резисторах и конденсаторе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| Авторулевой | 1979 |
|
SU842725A1 |
| Авторулевой | 1988 |
|
SU1533950A1 |
| АВТОРУЛЕВОЙ | 1962 |
|
SU147104A1 |
| Авторулевой | 1988 |
|
SU1527092A1 |
| СУДОВОЙ АВТОРУЛЕВОЙ «СИНИЦА» | 1966 |
|
SU179639A1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| АВТОРУЛЕВОЙ СУДНА | 2009 |
|
RU2410282C1 |
I
nJ
10
к следяцей систе/ е гирокоппаса
