1
Изобретение относится к вспомогательным устройствам металлорел уш;их станков.
Известны устройства для перемещения механической руни, установленной на приводном валу, в корпусе которого размещены неподвижные и подвижные упоры.
С пелью повышения точности фиксации и надежности в предлагаемом устройстве приводной вал снабжен двумя кулачками, взаимодействующи1ми с двумя перемещающимися в расточках корпуса yпopa №, каждый из которых снабжен подпружиненными и жестким пальцами, при этом один из кулачков выполнен с овальным выступом, взаимодействующим попеременно с подпружиненными пальцами упоров, а другой - с двумя фиксирующими уступами, взаимодействующими попеременно с упорами.
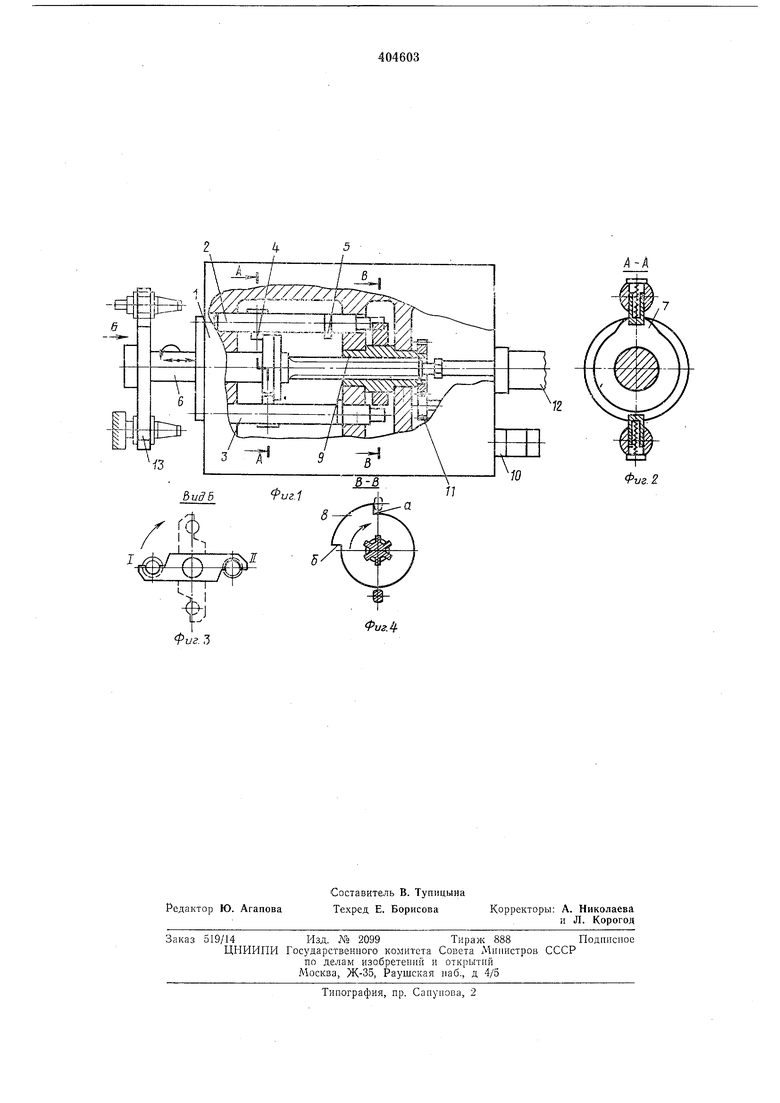
Иа фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - разрез по А-А на фиг. 1; на фиг. 3 - вид по стрелке Б на фиг. 1; на фиг. 4 - разрез по В-В на фиг. 1.
Устройство для перемещения механической руки содержит корпус 1, в расточках которого размещены два подвижных упора 2 и 3, каждый из которых снабжен подпружиненным 4 и жестким 5 пальцами.
На приводном валу 6 установлены два кулачка 7 и 8, из которых кулачок 7 выполнен
2
с овальным выступом, взаимодействующим попеременно с подпружиненными пальцами 4, а кулачок 8 выполнен с двумя уступами, взаимодействующими попеременно с подвижными упорами 2 и 3. Кулачок 8 закреплен на вращающейся втулке 9, в шлицевом отверстии которой перемещается шлицевой участок приводного вала 6.
Вал 6 вращается от гидромотора 10, расположенного на корпусе 1, через зубчатый редуктор И. Продольное перемещение вала обеспечивается гидроцилиндром 12, расположенным на корпусе 1.
Иа другом конце приводного вала закреплена механическая рука 13, которая переноОит инструмент из инструментального магазина в нлпиндель (на фигурах не показаны). Иальцы 4 выполнены подпружиненными и
при взаимодействии с кулачком 7 утапливаются внутрь упоров 2 и 3, не мешая при этом повороту кулачка 7.
Работа устройства производится по следующему циклу: поворот механической руки
на 90° - ход вперед, поворот на 180° - ход назад, поворот на 90° в исходное положение. От гидромотора 10 через зубчатый редуктор 11 и приводной вал 6 из исходного положения происходит первый по циклу поворот механической руки 13 на 90° для захвата инструмента из инструментального магазина.
Конец поворота ограничивается подвижным унором 2, в который упирается фиксирующий выступ а кулачка 8.
Второй по циклу ход механической руки 13 вперед. При этом приводной вал 6 от гидроцилиндра 12 перемещается влево. Вместе с ним перемещается кулачок 7. В конце хода вперед кулачок 7 упирается в подпружиненный палец 4 подвижного упора 2, сдвигая при ЭТОМ подвижной упор 2 влево и освобол дая кулачок 8 для возможности следующего, третьего по циклу поворота механической руки 13 на 180° в ту же сторону (по часовой стрелке) для смень инструмента. Поворот происходит до тех пор, пока кулачок 8 фиксирующим вьютупом а не упрется в подвижной упор 3. При повороте кулачок 7, взаимодействуя с подпружиненным пальцем 4 подвижного упора 3, утапливает его и свободно поворачивается.
Четвертый по циклу ход механической руки 13 .назад. При этом кулачок 7 упирается в жесткий палец 5 подвижного упора 2 и сдвигает последний вправо в исходное положение.
Последним по циклу происходит поворот механической руки 13 на 90° против часовой стрелки в исходное положение П. В конце поворота фиксирующий выступ б кулачка 8 упирается в подвижный упор 2.
Затем из исходного положения П происходит первый по циклу поворот механической руки на 90°. Конец поворота ограничивается подвижным упором 3, в который упирается фиксирующий выступ а кулачка 8.
Второй по циклу ход механической руки 13 вперед. В конце этого хода кулачок 7 упирается в подпружиненный палец 4 подвижного упора 3, сдвигает его вправо и освобождает кулачок 8.
Третий по циклу поворот механической руми 13 на 180° до тех пор, пока фиксирующий выступ а кулачка 8 не упрется в подвижной упор 2. При повороте кулачок 7, взаимодействуя с подпружиненным пальцем 4 подвижного упора 2, утапливает его.
Четвертый по циклу ход механической руки 13 назад. При этом кулачок 7 упирается в жесткий палец 5 подпружиненного упора 3 и возвращает последний в исходное положение.
Последним по циклу происходит поворот механической руки 13 на 90° против часовой стрелки в исходное положение I. В конце поворота фиксирующий выступ б кулачка 8 упирается в подвижной упор 2, и цикл заканчивается. Далее цикл повторяется.
Предмет изобретения
1. Устройство для перемещения механической руки, установленной на приводном валу, в корпусе которого разамещены подвижные упоры, отличающееся тем, что, с целью повышения точности фиксации и надежности, приводной вал снабжен двумя кулачками, взаимодействующими с двумя перемещающимися в расточках корпуса упорами, каждый из которых снабжен подпружиненным и жестким .пальцами.
2; Устройство цо п. 1, отличающееся тем, что один из кулачков выполце.н с овальным
выступом, взаимодействующим попеременно с подпружиненными пальцами упоров, а другой - с двумя фиксирующими уступами, взаимодействующими попеременно с упорами. .rfiEbrn /. (чО
Фиг. Л
ФигЛ у
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПЕРИОДИЧЕСКОГО ВОЗВРАТНО- ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ | 1966 |
|
SU182464A1 |
| Полуавтомат для стачивания деталей по заданному контуру | 1974 |
|
SU506665A1 |
| Приводной механизм диапроектора | 1972 |
|
SU443354A1 |
| ШАГОВЫЙ ПРИВОД | 1972 |
|
SU335752A1 |
| Устройство для изготовления гиперболоидных контактных узлов Карташева В.В. | 1987 |
|
SU1554058A1 |
| Револьверная головка | 1974 |
|
SU531661A1 |
| Устройство для тренировки пловцов | 1986 |
|
SU1395343A1 |
| Токарный самоцентрирующий патрон | 1988 |
|
SU1710207A1 |
| Автооператор | 1974 |
|
SU554129A1 |
| ПЕРЕСТРАИВАЕМЫЙ ГЕНЕРАТОР СВЧ | 1987 |
|
SU1841023A1 |