1
Изобретение относится к судостроению.
Известны устройства к лрузоподъемлому средству судна, содержащие снабженный грузом поплавок, к которому прикреплены следящий трос н трос подъемной лебедки.
Целью изобретения является обеспечение возможности непрерывного измерения расстояния .между заданной точкой судна и находящимся на взволнованной новерхности поплавком.
Для этого предлагаемое устройство выполнено со следящим тросом, запасованным на снабженных приводом постоянного натяжения барабан, кинематически связанный с первичным счетчиком, измеряющим число оборотов барабана, и через сельсинную дистанционную передачу со вторичным счетчиком, показывающим длину вытравленного с барабана троса, т. е. фактически изменение расстояния между барабаном и поплавком на водной поверхности.
Для обеспечения возможности использования устройства для управления следящей системой грузоподъемного средства оно снабжено датчиком положения, который кинематически связан со вторичным счетчиком.
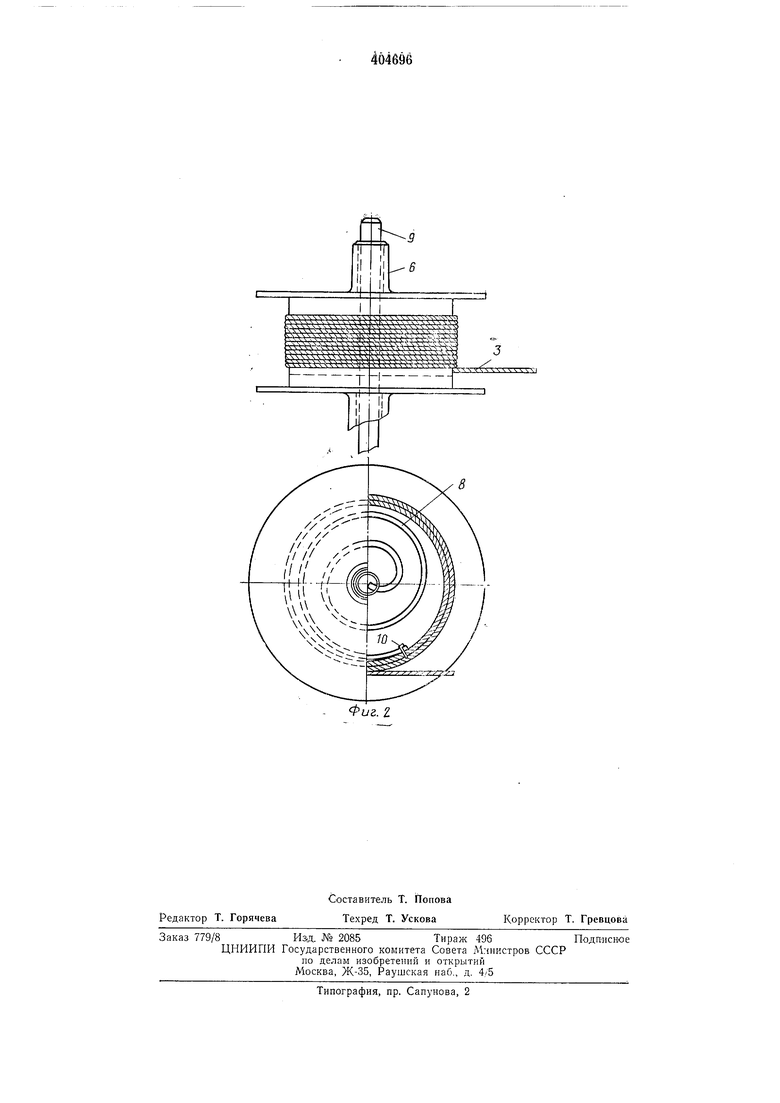
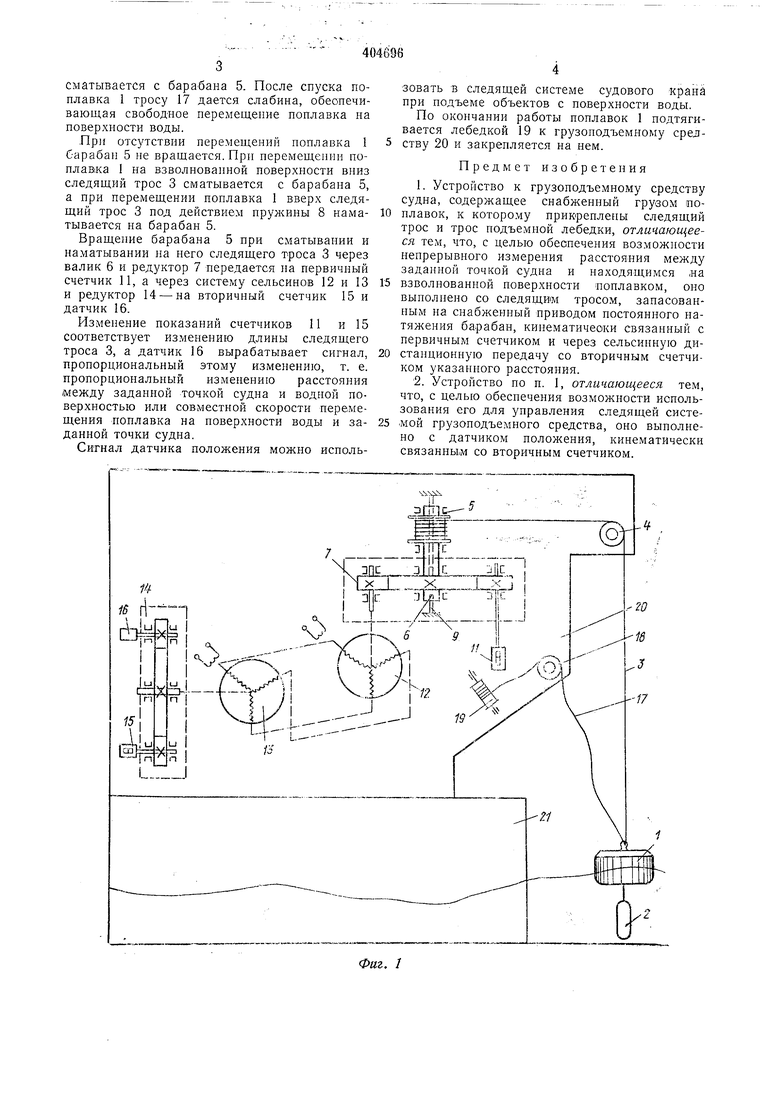
На фиг. 1 изображена общая схема описываемого устройства; на фиг. 2-барабан, две проекции.
Устройство содержит поплавок 1, к которому прикрепляется груз 2, заглубляемый на величину, обеспечивающую стабилизацию поплавка на взволнованной поверхности воды.
К поплавку 1 прикреплен следящий трос 3, перекинутый через блок 4 и запасованный на барабан 5, который валиком 6 соединяется с редуктором 7. Барабан 5 снабжен приводом постоянного натяжения, выполненным в виде
спиральной пружины 8, один конец которой крепится на оси 9, а другой на корпусе барабана 5 винто м 10.
Редуктор 7 кинематически связывает барабан 5 с помощью цилиндрических шестерен с
первичным счетчиком 11 измерительного устройства и сельсином-датчиком 12 сельсинной дистанционной передачи.
Вал сельсипа приемника 13 через редуктор 14 кинематически связан со вторичным счетчиком 15, с которым .кинематически связан датчик 16 положения следящей системы.
Для снуска и подъема поплавка 1 служит трос 17, перекинутый через блок 18 и запасованный на барабан подъемной лебедки 19.
Устройство смонтировано на грузоподъемном средстве 20, установленном на палубе судна 21.
Устройство работает следующим образом. При работе поплавок 1 с грузом 2 спускается на воду лебедкой 19, при этом трос 3
сматывается с барабана 5. После спуска поплавка 1 тросу 17 дается слабина, обеспечивающая свободное перемещение поплавка на поверхности воды.
При отсутствии перемещений поплавка 1 барабан 5 не вращается. При перемещении поплавка 1 на взволноваиной поверхности вниз следящий трос 3 сматывается с барабана 5, а при перемещении поплавка 1 вверх следящий трос 3 под действием пружины 8 наматывается на барабан 5.
Вращение барабана 5 при сматывании и наматывании на него следящего троса 3 через валик 6 и редуктор 7 передается на первичный счетчик И, а через систему сельсинов 12 и 13 и редуктор 14 - на вторичный счетчик 15 и датчик 16.
Изменение показаний счетчиков И и 15 соответствует изменению длины следящего троса 3, а датчик 16 вырабатывает сигнал, пропорциональный этому изменению, т. е. пропорциональный изменению расстояния между заданной точкой судна и водной поверхностью или совместной скорости перемещения поплавка на поверхности воды и заданной точки судна.
Сигнал датчика положения можно использовать в следящей системе судового крана при подъеме объектов с поверхности воды.
По окончании работы поплавок 1 подтягивается лебедкой 19 к грузоподъемному срелству 20 и закрепляется на нем.
Предмет изобретения
1. Устройство к грузоподъемному средству судна, содержащее снабженный грузом поплавок, к которому прикреплены следящий трос и трос подъемной лебедки, отличающееся тем, что, с целью обеспечения возможности непрерывного измерения расстояния между заданной точкой судна и находящимся .на
взволнованной поверхности поплавком, оно выполнено со следящим тросом, запасованным на снабженный приводом постоянного иатяжения барабан, кинематически связанный с первичным счетчиком и через сельсинную дистанционную передачу со вторичным счетчиком указанного расстояния.
2. Устройство по п. I, отличающееся тем, что, с целью обеспечения возможности использования его для управления следящей систе юй грузоподъемного средства, оно выполнено с датчиком положения, кинематически связаниьш со вторичным счетчиком. .Ж1;- -Ж... CXIL... T.--.... 1 TV .jTZJL .,.
Фаг, 1 I I
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ПРИ ВОЛНЕНИИ | 1973 |
|
SU378372A1 |
| Система управления двухканатной грузовой дорогой между судами в море на ходу | 1974 |
|
SU600025A1 |
| Устройство для стабилизации на заданной глубине опущенных на тросе объектов | 1975 |
|
SU537889A2 |
| ГРУЗОВАЯ ЛЕБЕДКА | 1964 |
|
SU164211A1 |
| УСТРОЙСТВО для СТАБИЛИЗАЦИИ ГОРИЗОНТАЛЬНОГО ПОЛОЖЕНИЯ ПЛАВУЧЕГО СООРУЖЕНИЯ НАД ТОЧКОЙСТОЯНКИ | 1967 |
|
SU205748A1 |
| Ш БИБЛИОТЕКА | 1972 |
|
SU356196A1 |
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| УСТРОЙСТВО ДЛЯ БЕЗУДАРНОЙ ПОГРУЗКИ ГРУЗА НА ПАЛУБУ СУДНА ПРИ ВОЛНЕНИИ МОРЯ | 1973 |
|
SU368111A1 |
| Поплавковый уровнемер | 1976 |
|
SU587337A1 |
| СЛЕДЯЩЕЕ УСТРОЙСТВО к СУДОВЫМ КРАНАМДля | 1969 |
|
SU247814A1 |