Известны грузовые лебедки со следяш,им гидравлическим приводом, преимуш,ественно для предотвращения ударов груза о палубу при перегрузке его с одного судна (кранового) на другое (некрановое) в открытом море.
Предлагаемая грузовая лебедка относится к тому же типу машин, но отличается от известных тем, что, с целью повышения безопасности перегрузочных работ, следящий гидравлический привод связан с барабаном лебедки через дифференциальный редуктор и управляется датчиком, установленным на палубе некрапового судна. Датчик воздействует на насос следящего привода таким образом, что при заторможенном подъемном приводе расстояние от палубы некранового судна до перегружаемого груза остается практически неизменным при изменении расстояния от палубы этого судна до оголовка стрелы.
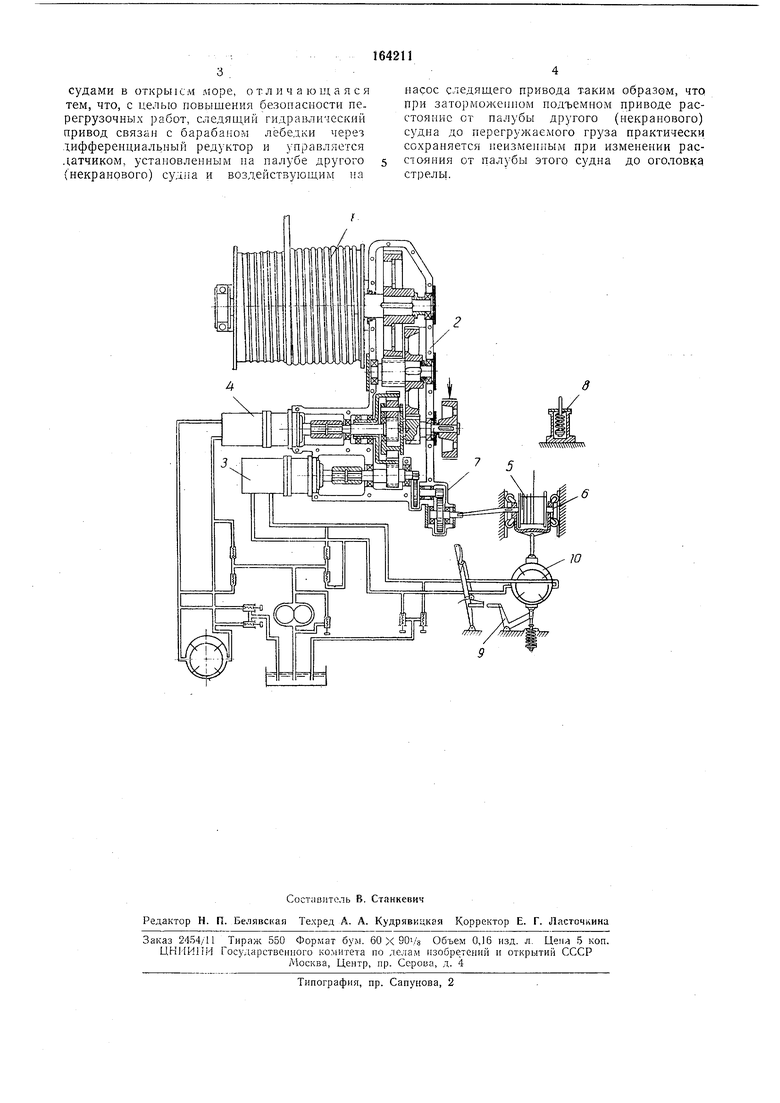
Па чертеже изображена предлагаемая грузовая лебедка.
Лебедка включает в себя барабан /, дифференциальный редуктор 2, следящий 5 и подъемный 4 гидравлические приводы, а также следящую систему. Последняя состоит из подпружиненной катушки 5 с тросом управления, перемещающейся в направляющих 6; передачи 7, кинематически связывающей катушку со следящим приводом так, что при заторможенном гидродвигателе подъема и работающем гидродвигателе следящей системы скорости намотки грузового каната и троса управления одинаковы. Регулирование следящего гидравлического привода отсуществляется датчиком автоматического упранлеиия 8, установленным на палубе некранового судна. Этот датчик представляет собой груз (весьма малый по сравнепию с перегружаемым), соединенный с концом тросика управления пружиной. Ручное устройство 9 предназначено для изменения производительности насоса 10 следящего привода.
Во время перегрузки груза с кранового судна на некрановое при волнении следящий привод включается только тогда, когда груз находится над некрановым судном. Сначала следящий привод включается на опускание, а подъемный - на нодъем. Как только .датчик следящего устройства коснется палубы некранового судна, следящий привод переключится на автоматический режим, а подъемный - на опускание, при этом перегружаемый груз опустится на палубу этого судна.
Предмет изобретения
Грузовая лебедка со следящим гидравлическим приводом, преимущественно для предотвращения ударов груза о палубу при производстве грузовых операций между двумя
3 .
судами в откры i с м люре, о т л и ч а ю ьц а я с я тем, что, с целью повышения безопасности перегрузочных работ, следящий гидравлический привод связан с барабаном лебедки через дифференциальный редуктор и управляется датчиком, установленным на палубе другого {некранового) судна и воздействующим на
насос следящего привода таким образом, что при заторможенном подъемном приводе расстояние от палубы другого (некранового) судна до перегружаемого груза практически сохраняется неизменным при изменении расстояния от палубы этого судна до оголовка стрелы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СУДОВОЙ КРАН ДЛЯ БЕЗУДАРНОЙ ПЕРЕГРУЗКИ ГРУЗОВ НРИ КАЧКЕ | 1971 |
|
SU417340A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА СУДОВОГО КРАНА | 2003 |
|
RU2262464C2 |
| КРАНОВОЕ СУДНО | 1992 |
|
RU2043291C1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ПРИ ВОЛНЕНИИ | 1973 |
|
SU378372A1 |
| Кран для подачи груза с передающего судна на принимающее судно в условиях волнения моря | 1972 |
|
SU559856A1 |
| СЛЕДЯЩЕЕ УСТРОЙСТВО К СТРЕЛОВЫМ КРАНАМ | 1965 |
|
SU171752A1 |
| ГРУЗОПОДЪЕМНЫЙ КРАН | 1969 |
|
SU238362A1 |
| Система управления двухканатной грузовой дорогой между судами в море на ходу | 1974 |
|
SU600025A1 |
| Способ перемещения груза двумя кранами | 1981 |
|
SU998314A1 |
| Судовое грузовое устройство | 1974 |
|
SU514743A1 |