1
Изобретение относится к механизации погрузочно-выгрузочных работ, в частности к вилочным погрузчикам, широко применяемым во всех отраслях народного хозяйства.
Известны грузоподъемники вилочных погрузчиков, содержащие неподвижную и, по крайней мере, одну подвижную рамы, грузовую каретку, перемещающуюся под действием силового цилиндра по направляющим подвижной рамы на роликах, верхние из которых выходят из направляющих подвижной рамы при крайнем верхнем положении каретки и ограничивающие дальнейший подъем грузовой каретки съемные упоры.
Однако известные грузоподъемники для обеспечения устойчивости каретки при верхнем ее положении требуют значительного увеличения количества роликов, что усложняет и утяжеляет их конструкцию.
Цель изобретения - упростить конструкцию грузоподъемника и уменьшить количество роликов при обеспечении ограничения бокового смещения грузовой каретки в положениях ее, близких к крайнему верхнему.
Для этого съемные упоры установлены на грузовой каретке с прилеганием их боковых поверхностей к направляющим подвижной рамы и с возможностью скольжения по ним.
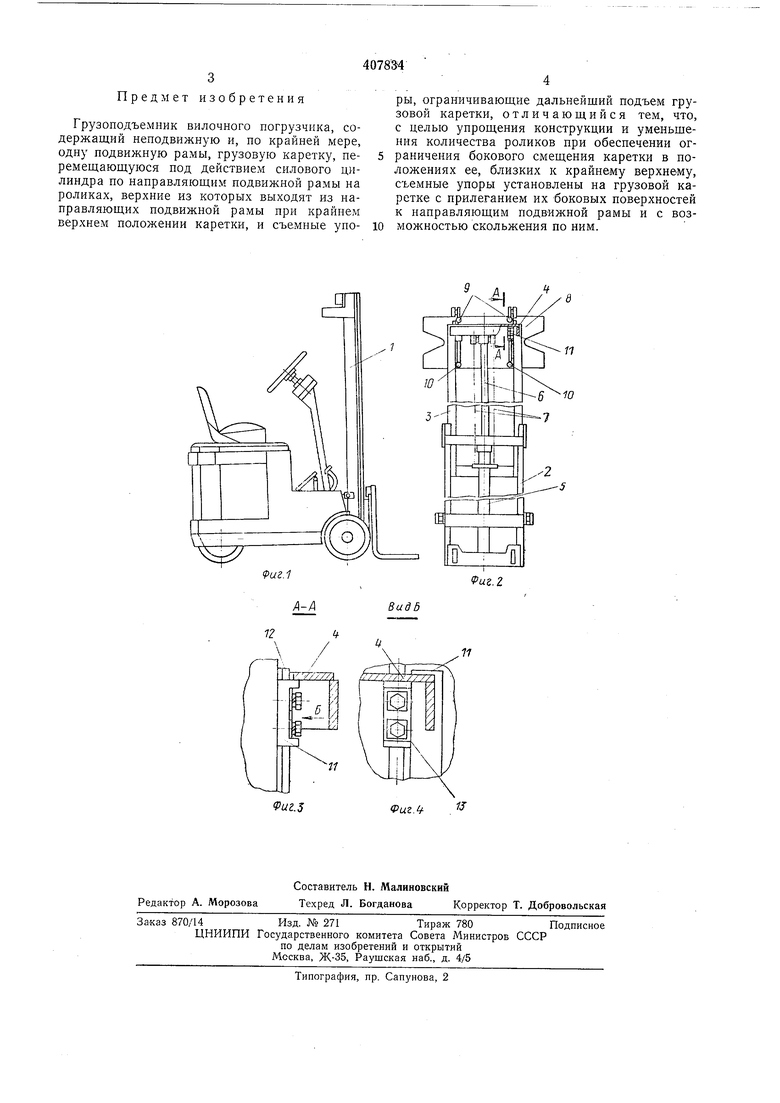
На фиг. 1 показан вилочный погрузчик с грузоподъемником, об1ций вид; на фиг. 2 - вид с
места водителя на грузоподъемник вилочного
погрузчика; на фиг. 3 - разрез по А-А на
фиг. 2; на фиг. 4 - вид по стрелке Б на фиг. 3.
Грузоподъемник 1 вилочного погрузчика
содержит неподвижную раму 2, подвижную
раму 3 с верхней связью 4, силовой цилиндр
подъема 5 с плунжером 6, грузовые цепи 7 и
грузовую каретку 8, на которой установлены
две пары боковых роликов: верхние ролики 9
и нижние ролики 10, а также установлены
съемные упоры 11с торцевыми поверхностями
12и боковыми поверхностями 13 таким образом, что поверхности 13 прилегают к направляющим подвижной рамы 3.
При работе грузоподъемника плунжер 6, выдвигаясь вверх, поднимает подвижную раму 3 и через цепи 7 грузовую каретку 8 так, что она движется в два раза быстрее подвижной рамы 3.
В положениях каретки 8, близких к крайнему верхнему, пара боковых роликов 9 выходит из направляющих подвижной рамы 3, и с этого момента включаются в работу съемные упоры 11, скользя своими поверхностями
13по направляющим рамы 3 и, ограничивая, таким образом, боковое смещение грузовой каретки 8 до момента вхождения торцевых поверхностей 12 упоров 11 в упор с верхней
связью 4 подвижной рамы 3.
Предмет изобретения
Грузоподъемник вилочного погрузчика, содержащий неподвижную и, по крайней мере, одну подвижную рамы, грузовую каретку, перемещающуюся под действием силового цилиндра по направляющим подвижной рамы на роликах, верхние из которых выходят из направляющих подвижной рамы при крайнем верхнем положении каретки, и съемные упоры, ограничивающие дальнейший подъем грузовой каретки, отличающийся тем, что, с целью упрощения конструкции и уменьщения количества роликов при обеспечении ограничения бокового смещения каретки в положениях ее, близких к крайнему верхнему, съемные упоры установлены на грузовой каретке с прилеганием их боковых поверхностей к направляющим подвижной рамы и с возможностью скольжения по ним.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОВАЯ КАРЕТКА ГРУЗОПОДЪЕМНИКА ПОГРУЗЧИКА | 2024 |
|
RU2828413C1 |
| Грузоподъемник погрузчика | 1983 |
|
SU1237624A1 |
| Грузоподъемник погрузчика | 1977 |
|
SU701927A1 |
| Грузоподъемник вилочного погрузчика | 1990 |
|
SU1730024A1 |
| ТЕЛЕСКОПИЧЕСКИЙ ГРУЗОПОДЪЕМНИК ПОГРУЗЧИКА | 1968 |
|
SU221565A1 |
| Грузоподъмник погрузчика | 1973 |
|
SU540814A1 |
| Грузоподъемник погрузчика | 1985 |
|
SU1296507A1 |
| ГРУЗОПОДЪЕМНИК ПРОМЫШЛЕННОГО ПОГРУЗЧИКА | 1991 |
|
RU2048431C1 |
| Рабочая платформа для вилочного погрузчика | 1989 |
|
SU1615154A1 |
| Погрузчик | 1980 |
|
SU931702A1 |
Фиг.1
fuz.Z
