1
Изобретение относится к области подъемнотранспортнон техники, а именно к устройствам для автоматического снятия изделий с подвесного конвейера.
1-1звестиы устройства для автоматического снятия изделий с подвеспого коивейера, содержаии1е кантователь изделий, выполненный в виде смоитированной на станине поворотной платформы, мехапизм снятия изделий в виде подъемно-опускного элемепта и систему датчиков для управления работой устройства.
Целью изобретения является новышение надежности устройства в работе и обеспечеиие плавности снятия изделий цилиндрической формы с относительно малым центральны отверстием.
Это достигается тем, что нодъемно-оиускной элемент механизма снятия изделий снабжен новоротным рычагом, служащим для цеитрнровання изделий и скатывания их в ка1ггователь, а на уровне подвесок конвейера смонтирована рама с поворотным от силового цилиндра двуплечим рычагом, взаимодействующим одним концом с крюком нодвески, причем второй конец двунлечего рычага размен ен в криволннейной ианравляющей рамы, а ось вращення рычага расноложена на щтоке силового цилиидра.
Кроме того, с целью гащенкя кннетической
энергнн нзделий прп их скатывании в кантователь, иа стаиние устройства смо1ггнроваи амортизирующий )пор.
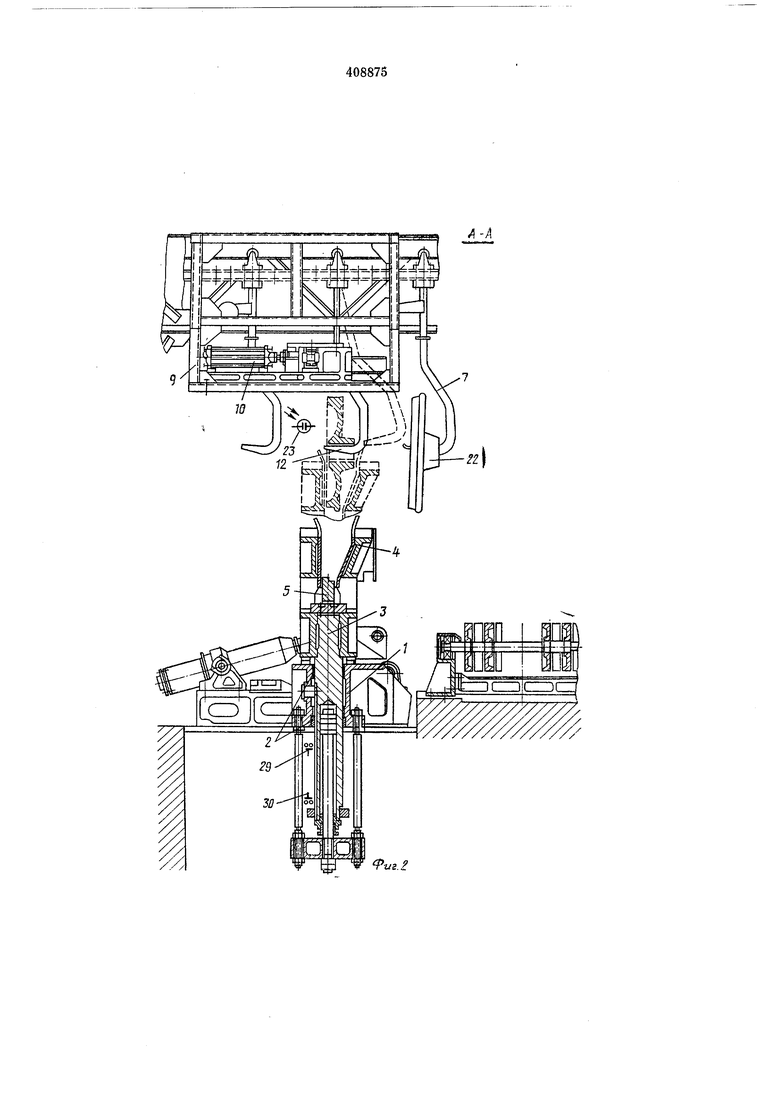
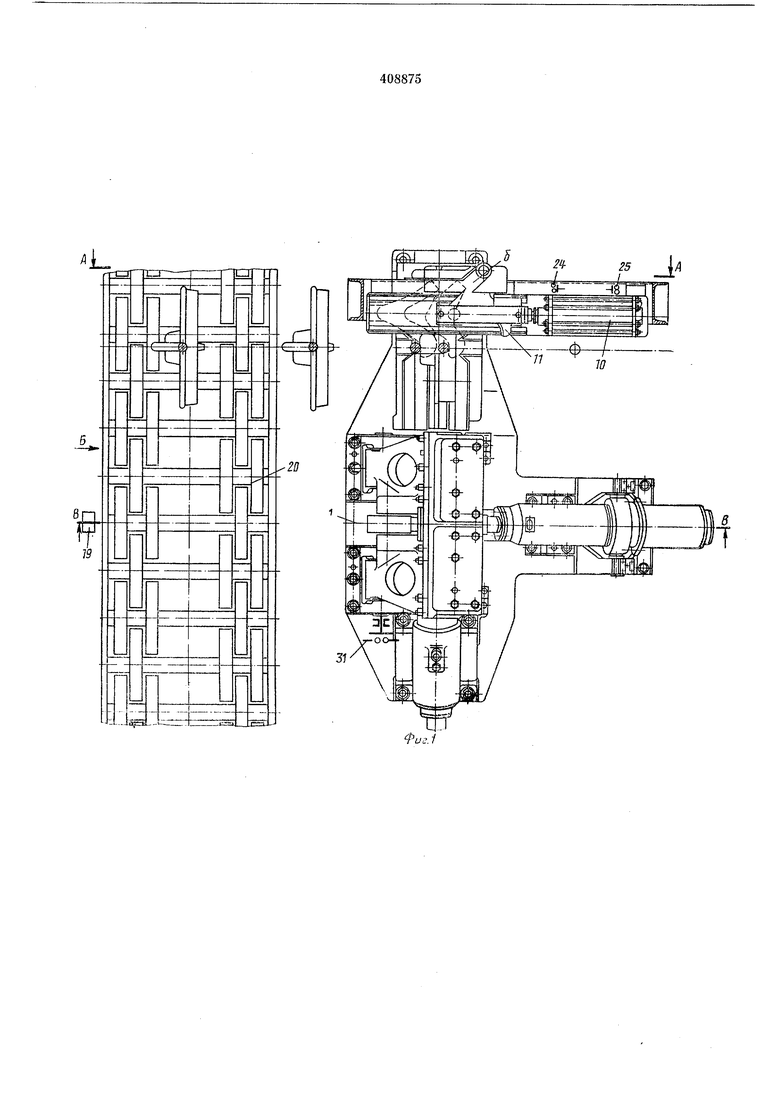
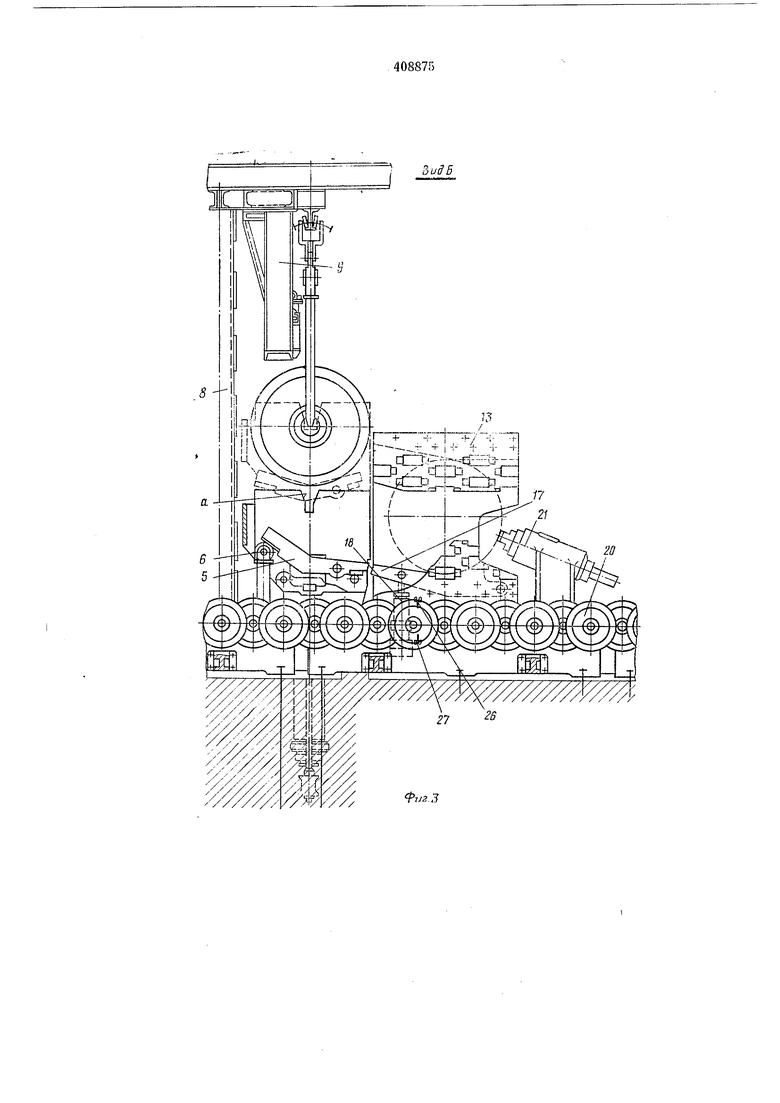
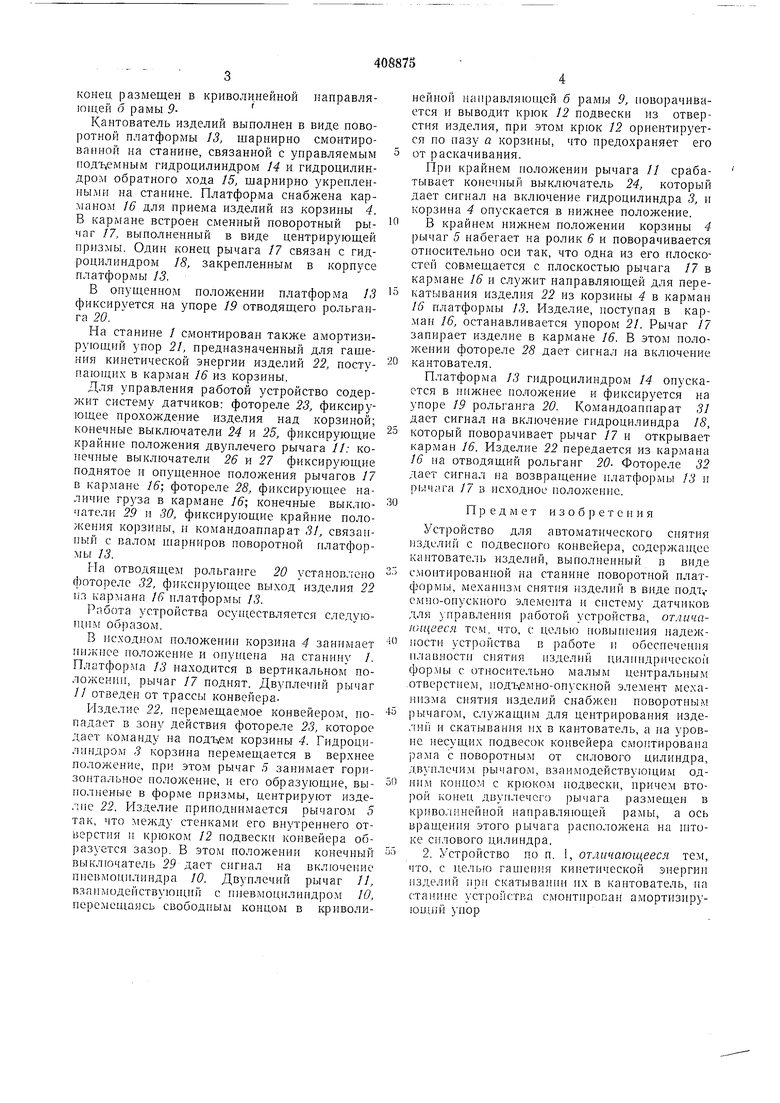
Ма фпг. 1 изображено предлагаемое устройство в плапе (стрелкой показано направление движения изделий на подвесно конвейере); иа фиг. 2-разрез по А-А на фиг. 1 (изображение повернуто на 180°); на фиг. 3 - вид ио стрелке Б иа фиг. 1; на фиг. 4 - разрез
но иа фиг. 1.
Механизм сиятия изделий выполнен в виде смонтировапного на станине / в нанравляющнх втулках 2 нод-ь.емио-онускного гидроцилиидра ., несущего приемную корзину 4. Во
внутренней полости корзины встроен новоротиый рычаг 5, выполненный в виде центрирующей нрпзмы. Рычаг 5 сменный и подбирается в соответствии с размерами перегрулсаелЬ х изделий. На станине / укреплены ролик 6, взаимодействующий с рычагом 5 при нижнем положении корзины. На боковых стенках корзииы 4 выполнен направляющий наз а. Над корзиной на уровне несущнх нодвесок 7 на стойках 8 смонтирована рама .9, несущая ппевмоцилиндр 10 и взаимодействующий с ним двуплечий поворотный рычаг //. Ось вращения рычага // расположена на штоке цилиндра. Один конец рычага взаимодействует с крюком 12 подвески 7, а второй конец размещен в криволинейной направляющей б рамы 9Кантователь изделий выполнен в виде поворотной платформы 13, шарнирно смонтированной на станине, связанной с управляемым подъ.емным гидроцилиндром М и гидроцилиндром обратного хода 15, шарнирно укрепленнымн на станине. Платформа снабжена карманом 16 для приема изделий из корзины 4. В кармане встроен сменный поворотный рычаг 17, выполненный в виде центрирующей призмы. Один конец рычага 17 связан с гидроцилиндром 18, закрепленным в корпусе платформы 13. В опущенном полол ении платформа 13 фиксируется на упоре 19 отводящего рольганга 20. На станине / смонтирован также амортизирующий упор 21, предназначенный для гашения кинетической энергии изделий 22, поступающих в карман 16 из корзины. Для управления работой устройство содержит систему датчиков: фотореле 23, фиксирующее прохождение изделия над корзиной; конечные выключатели 24 и 25, фиксирующие крайние положения двуплечего рычага //. конечные выключатели 26 и 27 фиксирующие поднятое и опущенное положения рычагов 17 в кармане 16; фотореле 28, фиксирующее наличие груза в кармане 16; конечные выключатели 29 н 30, ф иксирующие крайние положения корзины, п Командоаппарат 31, связанный с валом шарниров поворотной платформы 13. На отводящем рольгапге 20 установлено фотореле 32, фиксирующее выход изделия 22 из карлгана 16 платформы 13. Работа устройства осун|;ествляется следующим образом. В исходном положении корзина 4 занимает нн;кпее положение и опущена на станину /. Платформа 13 находится в вертикальном положении, рычаг 17 поднят. Двуплечий рычаг // отведен от трассы конвейераР1зделие 22, перемещаемое конвейером, попадает в зону действия фотореле 23, которое дает команду на подъ,ем корзины 4. Гидроцилмндром 3 корзина перемещается в верхнее полол ение, при этом рычаг ,5 занимает горизонтальное положение, и его образующие, выполненые в форме призмы, центрируют изделие 22. Изделие приподнимается рычагом 5 так, что между степками его внутреннего отиерстпя и крюком 12 подвески копвейера образуется зазор. В этом положении конечный выключатель 2Р дает сигнал на включение пневмоцплиндра 10. Двуплечий рычаг 11, взаимодействующий с ппевмоцилиндром 10, перемещаясь свободным концом в криволинейной направляющей б рамы 9, поворачивается и выводит крюк 12 подвески из отверстпя изделия, при этом крюк 12 ориентируется по пазу а корзины, что предохраняет его от раскачивания. При крайнем положении рычага // срабатывает конечный выключатель 24, который дает сигнал на включение гидроцилиндра 3, и корзина 4 опускается в нижнее положение. В крайнем нижнем положении корзины 4 рычаг 5 набегает на ролик 6 и поворачивается относительно оси так, что одна из его плоскостей совмещается с плоскостью рычага 17 в кармане 16 и служит направляющей для перекатывания изделия 22 из корзины 4 в карман 16 платформы 13. Изделие, поступая в карман 16, останавливается упором 21. Рычаг 17 запирает изделие в кармане 16. В этом положении фотореле 28 дает сигнал на включение кантователя. Платформа 13 гидроцилиндром 14 опускается в полол ение и фиксируется на упоре 19 рольганга 20. Командоаппарат 31 дает сигнал на включение гидроцилиндра 18, который новорачивает рычаг 17 и открывает карман 16. Изделие 22 передается из кармана 16 на отводящий рольганг 20. Фотореле 32 дает сигнал на возвращение платформы 13 и 17 в исходное положение. Предмет изобретения Устройство для автоматического снятия изделий с подвесного конвейера, содержан1.ее кантователь изделий, выполненный в виде смонтированной на станине поворотной нлатформы, механизм снятия 1зделий в виде под:-,емно-опускного элемента и снстему датчиков для управления работой устройства, отлича ои(ееся тем, что, с целью 11овып ения надежности устройства в работе п обеспечения плавности снятия изделий цилпндрической формы с относительно малыл nenTpavTbnbiM .отверстием, подъемно-опускной элемент механизма снятия изделий снабжен поворотным рычагом, служащим для центрирования изделий и скатывания их в кантователь, а на уровне несущих подвесок конвейера смонтировапа рама с поворотным от силового цилиндра, двуплечим рычагом, взаилгодействующим одним концом с крюком подвески, причем второй конец двуплечего рычага размещен в криволинейной направляющей рамы, а ось вращення этого рычага расположена на нлтоке силового цилиндра. 2. Устройство по п. 1, отличающееся тем, что, с целью гашения кинетической энергии изделий прн скатывании пх в кантователь, на Станнне устройства смонтирован амортизирующий упор
И-/1
ш.2
/
ЗиЗБ
20
.З
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО НАВЕШИВАНИЯ ИЗДЕЛИЙ НА ПОДВЕСНОЙ КОНВЕЙЕР | 1973 |
|
SU399437A1 |
| ПОДВЕСНОЙ КОНВЕЙЕР | 1973 |
|
SU408878A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ НАВЕСКИ НА ПОДВЕСНОЙ КОНВЕЙЕРПДЕ&Т'ЙЙ | 1966 |
|
SU189744A1 |
| ПОДВЕСНОЙ КОНВЕЙЕР | 1969 |
|
SU239856A1 |
| Устройство для передачи изделий с одного конвейера на другой | 1973 |
|
SU469642A1 |
| УСТРОЙСТВО для рулонировАния волокнистогоКОВРА | 1970 |
|
SU271361A1 |
| Кантователь для передачи цилиндрических изделий в приемное устройство | 1979 |
|
SU876543A1 |
| УСТРОЙСТВО для СЪЕМА ГРУЗА С ПОДВЕСКИ КОНВЕЙЕРА | 1970 |
|
SU273723A1 |
| АВТОМАТИЗИРОВАННАЯ ЛИНИЯ ДЛЯ ЗАКАЛКИ КОЛЕС | 1973 |
|
SU389155A1 |
| СБОРКИ И СВАРКИ РАМНО-БАЛОЧНЫХ МЕТАЛЛОКОНСТРУКЦИЙ | 1969 |
|
SU251730A1 |