Изобретение отпосится к области иодъем.цотранеисртпой техника, а именно к иодаесным конвейерам.
Известны подвесные конвейеры, снабженные перегрузочными устройствами для авто.матического навешивания и снятия штучных изделий, содержаицгми ириемник ;гзделий, механизм улавливания и задержки нодвесок конвейера и систему датчиков для управления работой мехаиизлга. Однако в таких ко«вейерах перегрузочные устройст ва для автоматического иавешива.ния п снятия штучных изделий имеют довольно сложную коиструкд-ию, недостаточно надежны в работе, имеют низк у ю про; гз в од 11 т е л ь н о ст ь.
Цель изобретения - унрон1,ение ко струкцни конвейера и иовышение иромзводительностн и паде/киости работы нерегрузочных устройств.
Это достигается тем, что меха«изм улавливания и задержки нодвесок выполнен в виде iiapi) иоворотных рычагов, взаимосвязаиных друг с другом иосредством зубчатых секторов. синхронно новорачиваюи их рычаги, один из которых имеет удлИНенное илечо, связанное с приводным 1или1НДром, а участок пути конвейера,. расиоложеиный над рычатами, выпол«е11 кр; 7юлипсйным для Предотвращения смейтеимя в вертикальной плоскости подвески конвейера, задержанной рычагами на время навешивания или снятия изделий, причем приемник изделш выполнен в В)1де поворотного стола. Для обеспечения приема н выдач; изделий иерегрузочнь ми устройствами в двух противоположных направлениях, на поворотном столе HjapHJtp io установлен двуплечий приз: атпческий рычаг, связанный своими «онпами со штоками двух пр«вод«ых пилиндров.
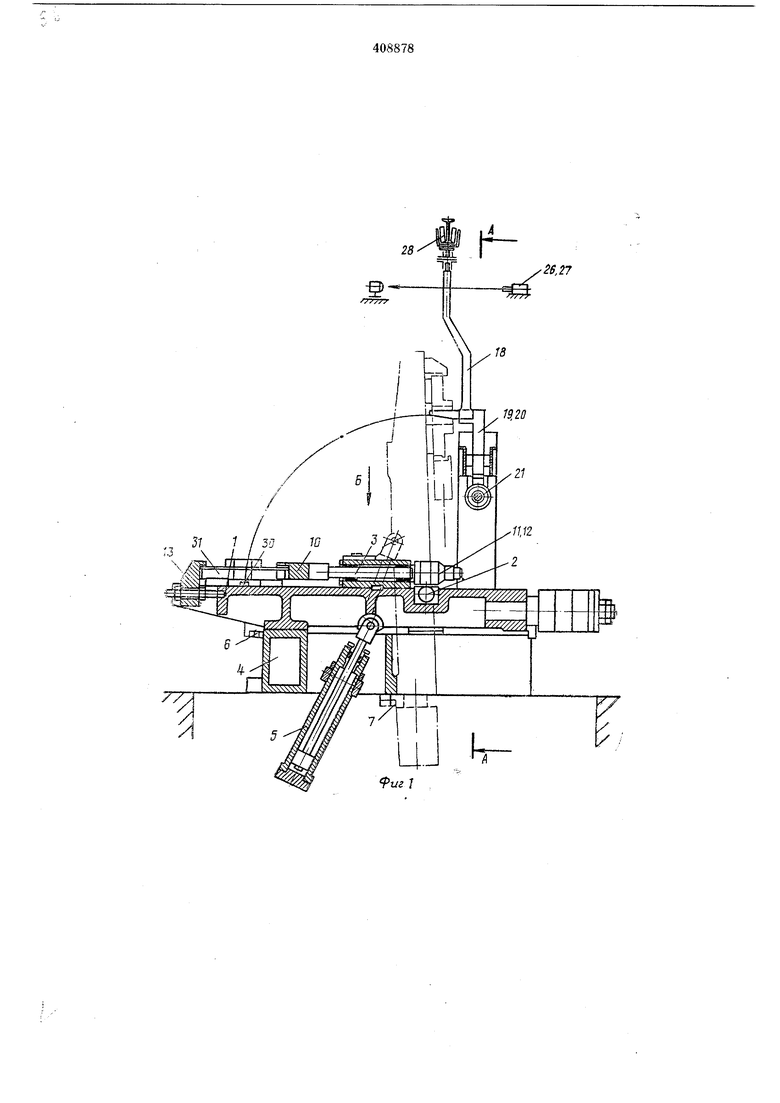
Па фиг. 1 изображены перегрузочное устройство, обицй вид и подвеска коч1вейера; на
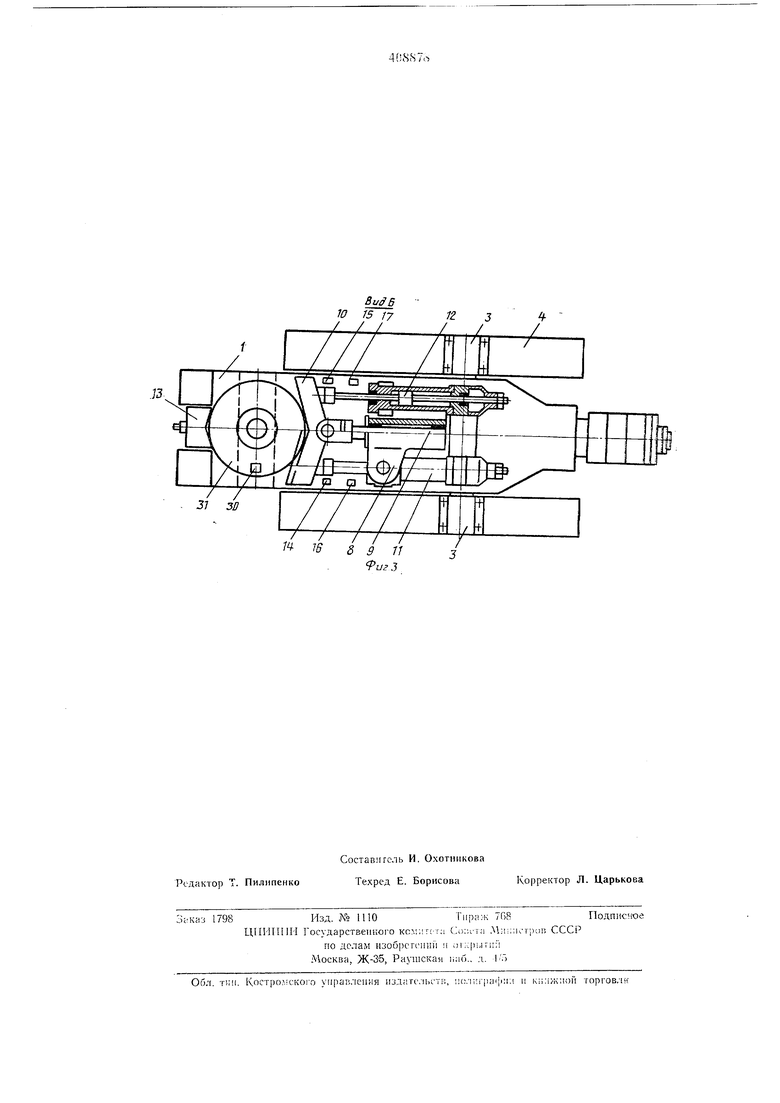
o фиг. 2 - разрез по А-А па фиг. 1; па фпг. 3- вид по стрелке Б на фиг. 1.
Подвесной кошвейср снабжеп перегрузочными устройствами для автоматического .на-вешизан1 я и снятия штучных изделий. Перегрузоч.5 устройство включает ирием.мик изделий, зьшолиеиный -в виде иОЮротного стола , который па цапфах 2 установлен в иодши1пниковых гнездах станины 4. Стол имеет возможность поворота из горизонтального лоложения в вертикальное с нолгощью гидро-цилиидра. J. В конечных иоложениях иоворот стола фиксируется электрическнми датчиками 6 и 7. Ila столе / жестко закреплена рама 8, па которой смонтирована направляющая колонка 9. На калоике
5 пифнирио за.креплен двуплечий иризматпческлп рьгчаг 10, связаппый своими конпами со ллтокаИп ир)1водных ги.дроцилиндров П )i J2, установленных на раме 6. К столу / иршкреилсн регулируемый упор Крайние иоложе0 ПИЯ рачага 10 фткспруются электргческимм
датчиками 14-17.
Механизм для улавливания и задержки подвесок 18 конвейера в процессе навешивания или снятия изделий состоит из двух поворотных рычагов 19 и 20. Рычаг 19 имеет удлиненное плечо, связанное с приводным гидродклиндром 21. Синхронизация поворота рычагон осуществляется посредством зубчатых секторов 22. Рычаги 19 и 20 и гидроцилиндр 21 установлены на цалфах в подшНПНИковых гнездах непс.дзяжной рамы 23.
Крайние положения рычагов 19 и 20 фиксируются электрическими датчиками 24 и 25, при этом датчик 24 фиксирует сведенное положение рычагов, а датчик 25 - разведенное положение. Положение движущихся яодвесок 18 фиксируется фотореле 26 и 27.
Положение I .подвески соответствует .моменту подхода каретки 28 -к участку 29 пути конвейера. Этот участок расположен над рычагами 19 и 20 и вылолиен криволинейным, что предотвращает смещение в вертикальной плоскости иодвески кОНвейера, задержанной рычагами на вре.гя назешизаиия или снятия .изделий. Па столе / устансвлак электрический датчик 30. фиксирующий наличие изделия 31.
Перегрузочное устройство работает следующим образом.
При навещцвалии изделия на иодвеоиой конвейер стол / устанавливается в горизонтальное положение. Р1зделие 31 подается с одной стороны перегрузочного устроГгства. При этом в зависи.мости от стороиы подачи изделия рычаг 10 с помопдью гидроцилиидров // или 12 повернут в сторону иодачи и свободно пропускает иодаваемое изделие. По сигиалу датчика 30 о }1аличии изделия на столе рычаг 10 гндроиилпидром // или 12 прижимает изделие к уиору 13 и одновременно центрирует его ио оси приемииКа. В этом положении рычага включаются датчики 14 и 15, дающие сигнал i:) готовности устройства к иавешиваиию изделия на крюк подвески 18.
При нодходенод вееки в положение I фотореле 26 дает ко.маиду «а улавливание крюка. Одновремеино гидроцилиидром 21 сводятся рычаги 19 и 20 и улавливают подвеоку. Датчиком 24 дается сиги ал о готовиости подвески к навешищаиию. По этому сигиалу стол 1 с изделием; поворачивается гидроцилиндром 5 в вертнКальное положение. В конечиом вертикальном положении стола датчик 7 дает сигнал на включение гидроцилиндра 12, который поворачивает рычаг 10 в сторсму движеиия иодвески. При этом изделие иавешищается на крюк подвеоки, а рычаг 10 иоворачивается до своего крайнего иижиего иолож-ения. Пижнее положение рыча:га фиксируется датчиком 17, ио сигналу которого стол / возвращается в исходное иоложение, при этом датчик 6 дает сигнал на иоворот в исходное иолол-сение рычага 10, а датчик 16 или 17 дает разрешение на качало следующего цикла.
В иоложении И иодвески фотореле 27 дает сигнал на включение гидроцилиндра 21, который разводит рычаги 19 и 20 и осво|бождает подвеоку с изделием. При снятии изделия с конвейера стол 1 находится в крайнем верхнем положении, рычаг 10 повернут в сторону, противоположную Д1ВИ1жен. подвесок /5, рыги 19 и 20 разведены. При подходе подвески с изделием в по пожение П по сигналу фотореле 27 рычаги 19 и 20 сводятся и удерживают
подвеску. Одновременно с этим гидроцилиндр 12 поворачивает рычаг 10 в верхнее положение. Изделие поднимается над крюком иодвески 18 и прижимается к уиору 13. В этом положении ПО сигналу датчика 15 стол поворачилается гидроцилиндром 5 в ниЖНее положение. По сигналу фотореле 26, фиксирующего положеиие I подвеоки, рычаги 19 и 20 разводятся и освобождают порожиюю иодвеску. При удалении изделия со стола во время разгрузки
включается один из гидроцилиидров 11 или 12 в зависимости от того, на .какую сторону выдается изделие. После выдачи изделия рычаг 10 и стол 1 автоматически устанавливаются в исходное иоложение.
Предмет изобретения
1. Подвесной конвейер, снабжениый иерегрузочны.ми устройствами для автоматического навешивания и сиятия штучных изделий, содержащими ириемиик изделий, механизм улавливания и задержки подвесок коивейера и систему датчиков для управления работой мехаинзма, отличающийся тем, что, с целью упрощения конструкции и повышения ироизводительности и надежиости работы перегрузочных устройств, механизм улавливания и задержки подвесок вынолнеи в виде двух поворотных рычагов, взаимоовязанных друг с другом посредством зубчатых секторов, сиихронно поворачивающих рычаги, одии из которых имеет удлиненное илечо, связанное с приводным цилиидро.м, а участок пути конвейера, расположенный над рычагами, выполнен криволине 1кым для предотвращепия смещеиия в
вертикальной плоскости иодвески коивейера, задержаиной рычагами на время иавешивания или с 1ятия изделий, иричем приемник изделий выПолеи в виде поворотного стола. 2. Конвейер по и. 1, отличающийся тем, что,
с целью обеспечения приема и выдачи изделий перегрузочными устройствами в двух иротивоиоложиых панфавлеииях, «а поворотном столгшарг.ирно установлен двуплечий призматический рычаг, связанный своими кониа ми сощтоками двух приводиых цилиндров.
iJ
h28
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО СНЯТИЯ ИЗДЕЛИЙ С ПОДВЕСНОГО КОНВЕЙЕРА | 1973 |
|
SU408875A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО НАВЕШИВАНИЯ ИЗДЕЛИЙ НА ПОДВЕСНОЙ КОНВЕЙЕР | 1973 |
|
SU399437A1 |
| ЯАТЕНТНО- -^'" | 1970 |
|
SU261986A1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ МЕЖОПЕРАЦИОННОГО ТРАНСПОРТИРОВАНИЯ ГРУЗОВ | 1967 |
|
SU196614A1 |
| Устройство для съема и навешивания пакета длинномерных изделий | 1979 |
|
SU933580A1 |
| МЕХАНИЗМ ПЕРЕНОСА ПОДВЕСОК С НАГРЕВАЕМЫМИ ЗАГОТОВКАМИ К СОЛЯНОЙ ВЛННЕ | 1972 |
|
SU329224A1 |
| ПОДВЕСКА ПОДВЕСНОГО КОНВЕЙЕРА ДЛЯ ТРАНСПОРТИРОВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1970 |
|
SU286594A1 |
| Загрузочно-разгрузочное устройство для подвесных конвейеров | 1980 |
|
SU865746A1 |
| ПОДВЕСНОЙ ГРУЗОНЕСУЩИЙ КОНВЕЙЕРвсгсо:ЗСНАЯ;;:::;';Е:1ш::^ .'ЕКА | 1970 |
|
SU284700A1 |
| ПОДВЕСНОЙ ГРУЗОНЕСУЩИЙ КОНВЕЙЕР | 1970 |
|
SU267486A1 |

1й1
/5 Ю 15 /7 W 1В S
3 7/ иг Л
