1
Изобретение относится к гидравлическим следящим приводам комбипироваиного управления, у которых управляющий сигнал пропорционален как входному воздействию, так 1 его производным, и предназначено для использования в металлорежущих станках и других машинах при задании входного воздействия от программоносителя - кулачка, перфоленты, магнитной лепты и т. д.
В инвариантных следящих приводах высокая точпость слежения достигается за счет сочетания замкнутой цепи управления с разомкнутым контуром, но которому в систему управления вводятся сигналы, пропорциональные производпым входного воздействия. Это обеспечивает 1П1вариаптпость (иезависимость) регулируемой величины по скорости, ускоре1П1Ю и т. д. входиого воздействия.
Известно устройство нрограммного управления инвариантным гидроприводом, содержаniee подключенный к нрограммоносителю управляющего сигнала каскад унравления, выход которого соединен с полостями гидродвигателя, блок считывания корректирующего сигнала производных, выход которого подключен к ценочке носледовательно соеднпенных усплнтеля, сумматора н нреобразователя корректирующего сигнала, соединенного с входом каскада унравления.
Однако такое устройство не обеснечивает
высокой точности слежеипя пз-за 1П1зкои точности получаемых корректнруюнгнх сигналов производных. Иизкая точность нроизводпых в пем обусловлепа тем, что блок для их получения - тахогенератор работает в режиме ненрерывного реверсироваиня н, как нравило, с малым числом оборотов. Точность ухудщается также из-за иензбеж п 1х погрещностей механической передачп. Ири последовательпом дифференцировапии для получения второй и более высоких производных, ошибки значительно возрастают.
Предлагаемое устройство отличается тем, что, с целью новышеиия точности работы, оно содержит нрограммоноснтель корректирующего снгнала нроизводных, установлеииый на одном щиииделе с нрограммоноснтелем управляющего сигнала.
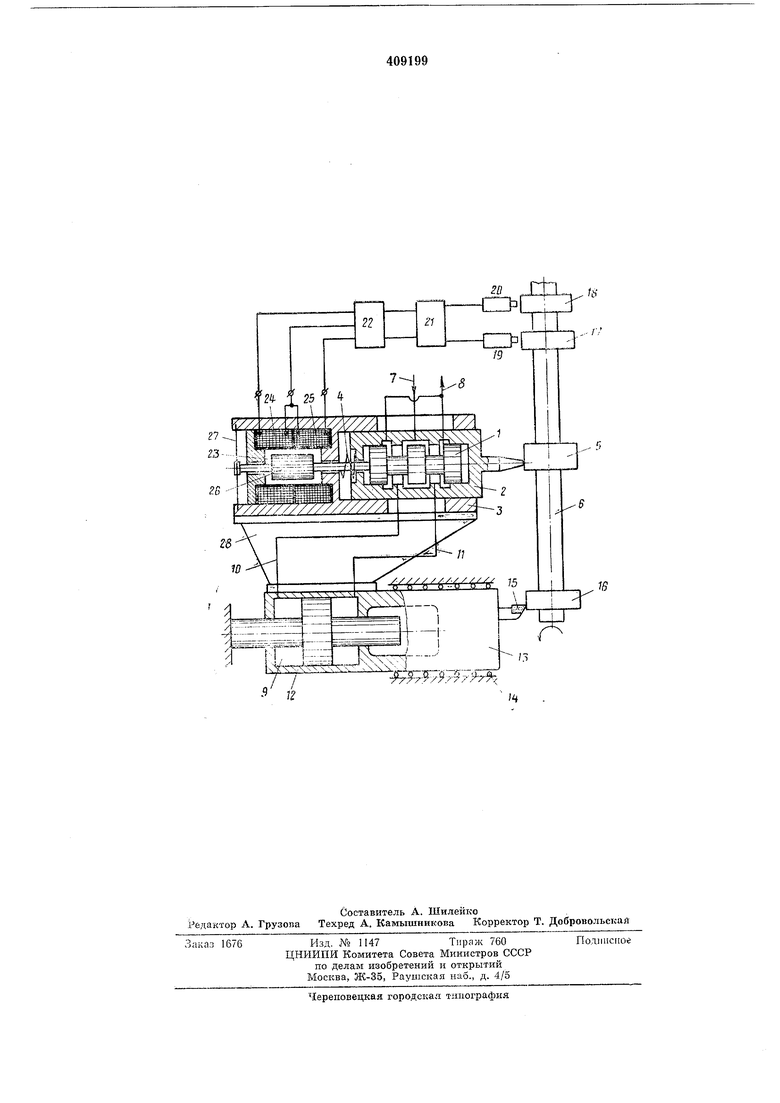
На чертеже показана принцнннальиая схема нредлагаемого устройства иридгеиительно к коппровальной обработке некруглых поверхпостей.
Устройство содержит каскад управления, например четырехкромочньп золотннк / с гнльзой 2, свободно носаженной в корпусе 5. Гильза пружиной 4 ностоянно нрижата к нрограммоноснтелю унравяяющего сигнала - копиру 5, закрепленному на шнинделе 6. Масло от насосной установкн (на че)теже не показана) подводнтся к золотнику / по магистрал 7; магистраль 8 - сливная. Гйдродвигатель состоит из гидроцилиндра 9, соединенного магистралями 10 11 с управляющим органом. Кориус 12 гидроцилиндра соединен с суппортом 13, установленным в направляющих 14 качения. В суннорте закреплен резец 15. Обрабатываемая деталь 16 крепится на ипинделе 6.
Программоноситель корректирующих сигналов производных содержит нрограммоносители 17 и 18 иервой и второй производных уиравляющего сигнала, установленные на щнинделе 6 и выполненные, например, в виде кулачков, перфоленты, магнитной ленты или барабана. Блоки 19 и 20 считываиия представляют собой датчики, магнитные головки и т. и. Блоки считываиия через усилитель 21 и сумматор 22 соединены с преобразователем 23 корректирующего сигнала. Преобразователь состоит из катущек 24, 25 и сердечника 26, ось которого закреплена в пружине 27, и золотиика 1. Обратная связь системы по положению осуществляется за счет закрепления корпуса 3 каскада управления на корпусе 12 гидродилиндра 9 с помощью кроищтейиа 2S.
При работе привода копир 5, вращаясь вместе со щпннделем 6, перемещает гильзу 2 следящего золотника 1, что вызывает перемепхение суппорта 13 с резцом 15. Например, при смещении гпльзы влево масло из магистрали 7 поступает в магистраль 10 и далее в левую полость гидроцилиндра 9; из правой полости цилиндра по магистралям // и 8 масло у.ходит на слив. Это вызывает перемещение влево корпуса 12 гидроцилиндра и суппорта 13 с резцом, на детали /6 копируется профиль шаблона.
Одновременно с этим от ирограммоиосите.1ей /7 и 18 через блоки 19 и 20 считывания подаются сигналы, пропорциональные первой и
второй ироизводиым управляющего воздейс вия. Эти сигиалы через усилитель 21 и сумматор 22 поступают иа катущки 24 и 25 преобразователя 23, вызывая смещенне сердечннка 26 вправо. Смещение сердечника приводит к смещеиию золотиика 1 относительно втулки 2, что увеличивает иодвод масла в левую полость гидроцилиндра 9 и отвод из правой полости. Величины расходов пропорциональиы
скорости и ускорению коиировальиого суипорта 13. Этим обеспечивается высокая точиость
обработки детали независимо от скорости и
ускорения суппорта.
Аналогичным образом вводятся третья и
более высокие производные от vпpaвляюи eгo сигнала.
Если отсутствуют сигналы от программоносителей производных, золотник иеподвижен относительно гильзы 2 и корпуса 3 и следящнй привод работает в обычном режиме - только от унравляющего сигнала, задаваемого нрофилем копира.
Предмет и з о б р с т е и н я
Устройство программного управления нпвариаитным гидроприводом, содержаи;ее подключеииый к ирограммоиосителю управляюП1,его сигнала каскад управлеипя, выход которого соединен с полостямп гидродвигателя,
блок считываиия корректируюгцего сигнала ироизводиых, выход которого подключеи к цепочке последовательно соедииеппых усилителя, сумматора и преобразователя корректирующего сигнала, соединенного с входодг
каскада уиравлення, отличаюш,ееся тем, что, с целью повышения точности работы устройства, оно содержит нрограммоноситель корректируюи1его сигнала производных, установленный иа одном шнииделе с програ.моиоснтелем управляюидего сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидравлический следящийпРиВОд | 1978 |
|
SU802657A1 |
| Устройство для динамических испытаний | 1980 |
|
SU922343A2 |
| Гидравлический люнет | 1983 |
|
SU1143566A1 |
| ГИДРОКОПИРОВАЛЬНАЯ БАБКА | 1971 |
|
SU295612A1 |
| Гидрокопировальный суппорт | 1980 |
|
SU904997A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРОТЯЖНОГО СТАНКА | 1970 |
|
SU278364A1 |
| Гидрокопировальный многопроходный суппорт | 1977 |
|
SU680857A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ С ДВУХКАСКАДНЫМ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ УСИЛИТЕЛЕМ МОЩНОСТИ | 2007 |
|
RU2361123C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1966 |
|
SU185484A1 |
| УСТРОЙСТВО для ПОДВОДА и ОТВОДА ГИДРОКОПИРОВАЛЬНОГО СУППОРТА | 1971 |
|
SU308854A1 |