фиг.1
Изобретение относится к электротехнике и может быть использовано, например, в электроприводах землеройных машин.
Целью изобретения является повышение быстродействия электропривода в пуско-тормозных режимах и повышение эффективности ограничения динамических нагрузок в режимах нагружения.
На фиг. 1 приведена схема электропривода; на фиг. 2 - диаграммы, поясняющие работу электропривода.
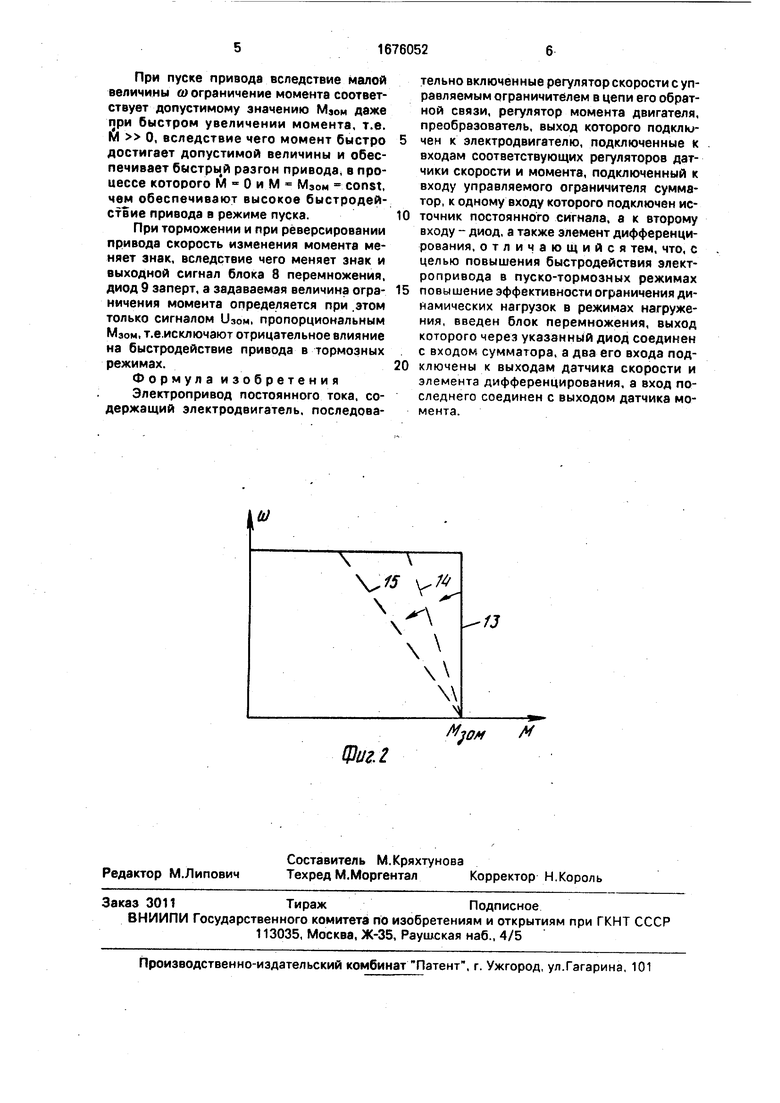
Электропривод содержит последовательно включенные регулятор 1 скорости, регулятор 2 момента, управляемый преобразователь 3, выход которого подключен к электродвигателю 4, датчики скорости 5 и момента 6, подключенные к входам соответственно регуляторов скорости 1 и момента 2. Кроме того, электропривод содержит элемент 7 дифференцирования, блок 8 перемножения, диод 9, источник 10 постоянного сигнала задания ограничения момента (статического ограничения момента), сумматор 11 и управляемый ограничитель 12 сигнала. Вход элемента 7 дифференцирования подключен к выходу датчика 6 момента, а его выход соединен с первым входом блока 8 перемножения, второй вход которого подключен к выходу датчика 5 скорости, выход блока перемножения 8 через диод 9 подключен к первому входу сумматора 11, второй вход которого соединен с выходом источника 10 постоянного сигнала. Выход сумматора 11 подключен к управляющему входу управляемого ограничителя 12, включенного в цепь обратной связи регулятора 1 скорости. На фиг. 2 график 13 представляет собой статическую механическую характеристику электропривода; а пунктирные линии 14 и 15 показывают изменение механической характеристики по мере увеличения скорости нарастания момента.
Электропривод работает, следующим образом.
На входы блока 8 перемножения подают сигналы, пропорциональные скорости изменения момента IV с выхода элемента 7 дифференцирования и скорости электропривода ft) с выхода датчика 5 скорости двигателя. На выходе блока 8 перемножения формируют сигнал, пропорциональный произведению (О М. В случае, если происходит увеличение момента, т е. здесь Kfl О, выходной сигнал блока 8 перемножения через диод 9 подают на вход сумматора 11, где его вычитают из сигнала 113ом , пропорционального задаваемой статической величине ограничителя момента М3ом. В соответствии с этой разностью с помощью управляемого ограничителя 12 изменяют ограничение выходного напряжения регулятора 1 скорости, представляющего собой задаваемую величину ограничения момента (макси- мальную задаваемую величину контура регулирования момента, образуемого регулятором 2 момента и датчиком 6 момента), в соответствии с разностью Kl Мэом - Кг iCl О ,
где Ki и Ка - коэффициенты пропорциональности.
. Если момент не увеличивается, т.е. М 0, то величина «w М 0, и ограничение момента соответствует статической механической характеристике 13. конечной скорости увеличения момента М 0, выходной сигнал блока 8 перемножения увеличи- вают с возрастанием скорости электропривода, и механическая характеристика электропривода приближается к пунктирной линии 14 на фиг. 2. При еще большей скорости нарастания момента эту характеристику еще больше отклоняют от статической в сторону уменьшения задания
ограничения (например, до пунктирной пинии 15 на фиг. 2). Таким образом, чем больше скорость увеличения момента и чем больше скорость электропривода, т.е. чем больше опасность возникновения больших
динамических нагрузок в режиме нагружения (с увеличением скорости возрастает кинетическая энергия механической части привода, которую надо погасить путем снижения скорости привода), тем большее
упреждение обеспечивают по ограничению этих нагрузок. Благодаря этому снижение скорости привода осуществляется еще до достижения допустимого значения момента, причем тем раньше, чем
больше скорость привода и чем больше скорость увеличения момента, а это исключает возможность возникновения больших динамических нагрузок, существенно превышающих допустимые, в режимах нагружения (при столкновении с трудно преодолимыми препятствиями), и тем самым повышают надежность и долговечность привода.
В то же время при работе привода с
постоянной или медленно изменяющейся нагрузкой () задаваемая величина ограничения момента не уменьшается, механическая характеристика привода соответствует статической характеристике
13, и привод работает с максимальной ско- ростью вплоть до допустимого момента Мэом. что способствует высокой производительности привода в нормальных режимах.
При пуске привода вследствие малой величины to ограничение момента соответствует допустимому значению Мэом даже при быстром увеличении момента, т.е. М 0, вследствие чего момент быстро достигает допустимой величины и обеспечивает быстрый разгон привода, в процессе которого М 0 и М Мзом const, чем обеспечивают высокое быстродействие привода в режиме пуска.
При торможении и при реверсировании привода скорость изменения момента меняет знак, вследствие чего меняет знак и выходной сигнал блока 8 перемножения, диод 9 заперт, а задаваемая величина ограничения момента определяется при .этом только сигналом Уэом, пропорциональным Мэом, т.е.исключают отрицательное влияние на быстродействие привода в тормозных режимах.
Формула изобретения
Электропривод постоянного тока, содержащий электродвигатель, последовательно включенные регулятор скорости с управляемым ограничителем в цепи его обратной связи, регулятор момента двигателя, преобразователь, выход которого подключен к электродвигателю, подключенные к входам соответствующих регуляторов датчики скорости и момента, подключенный к входу управляемого ограничителя сумматор, к одному входу которого подключен источник постоянного сигнала, а к второму входу - диод, а также элемент дифференцирования, отличающийся тем, что, с целью повышения быстродействия электропривода в пуско-тормоэных режимах
повышение эффективности ограничения динамических нагрузок в режимах нагруже- ния, введен блок перемножения, выход которого через указанный диод соединен с входом сумматора, а два его входа подключены к выходам датчика скорости и элемента дифференцирования, а вход последнего соединен с выходом датчика момента.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока с подчиненным регулированием параметров | 1980 |
|
SU985914A1 |
| Способ ограничения динамических нагрузок электродвигателя и устройство для его осуществления | 1989 |
|
SU1679593A1 |
| Электропривод постоянного тока | 1977 |
|
SU729800A1 |
| Устройство управления копающим механизмом экскаватора | 1990 |
|
SU1710676A2 |
| Способ управляющей электродвигателем буровой лебедки и устройство для его осуществления | 1989 |
|
SU1705994A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ С ФРИКЦИОННОЙ НАГРУЗКОЙ | 1992 |
|
RU2079961C1 |
| Устройство для управления асинхронным электроприводом лифта | 1979 |
|
SU773883A1 |
| Реверсивный тиристорный электропривод с упругой передачей от двигателя к механизму | 1977 |
|
SU731539A1 |
Изобретение относится к электротехнике и может быть использовано в электроприводах землеройных машин. Целью изобретения является повышение быстродействия электропривода в пуско-тормозных режимах и повышение эффективности ограничения динамических нагрузок в режимах нагружения. Устройство содержит последовательно соединенные регулятор 1 скорости, регулятор 2 момента, преобразователь 3 и электродвигатель 4. Входы блока 8 перемножения соединены с датчиком 5 скорости и через блок 7 дифференцирования - с датчиком 6 момента. Выход блока 8 перемножения соединен с входом управляемого блока 12 ограничения. В данном устройстве обеспечивается ограничение момента электродвигателя 4 в зависимости от скорости электродвигателя и производной момента. 2 ил.
Vff у7
л
Щи г. г
у7
л
MJOM M
| Электропривод постоянного тока с подчиненным регулированием параметров | 1976 |
|
SU692041A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
