1
Изобретение относится к устройствам, предиаз 1ачеииы« для механизации и автоматизации производственных процессов в опасных для человека зонах.
Известен дистанционио-уиравляемый коннрующий уравновешенный манинулятор, включающий управляюш.ий и исполнительный механизмы, связанные между собой каналами управления по положению и прямыми каналами отражения нагрузки, в которых имеются датчики моментов, действующих в звеньях иснолнительного механизма, и приемники MOMeiiтов, установлен1 Ь е на уп|)авляющем механизме.
Цель изобретсння - уменьшение влияния моментов неуравновешенности звеньев исполнительного меха 1изма на качество отражении нагрузки.
Для этого в нредлагаемый манипулятор введены перекрестные каналы отражения нлгрузки, связывающие датчики моментов уравновешенных звеньев через блоки cpaBHeHHvi сигналов со всеми приемниками моментов не уравновешенных звеньев.
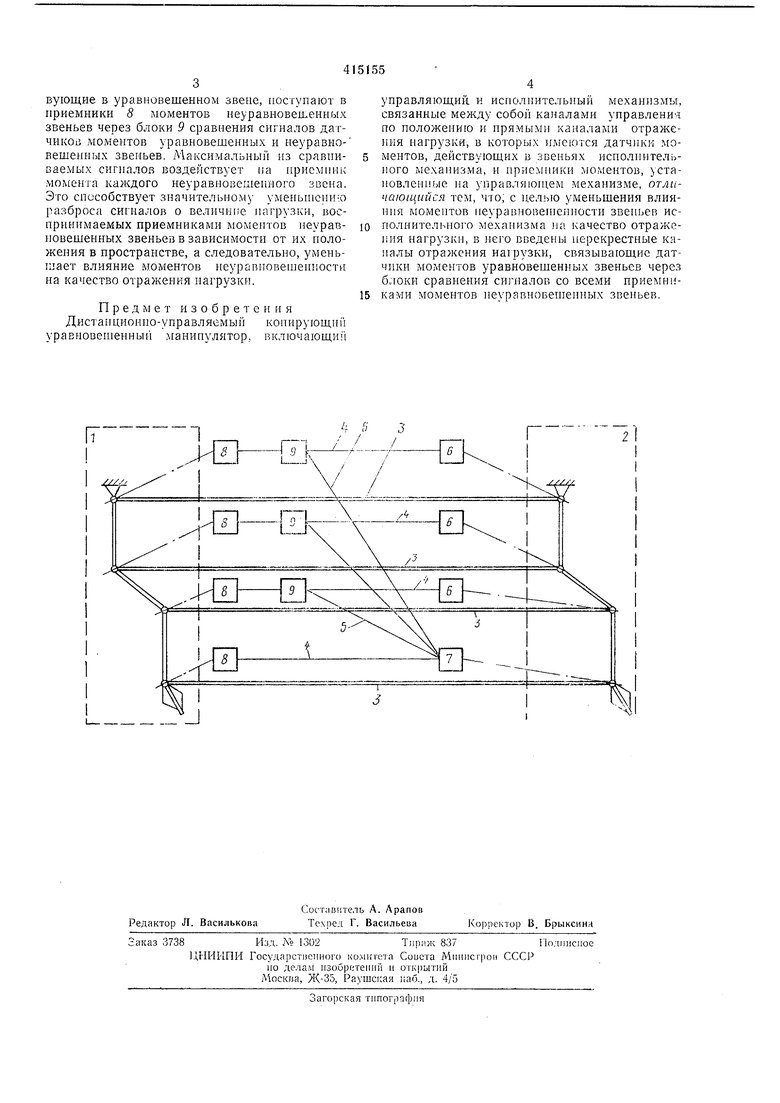
На чертеже представлена блок-cxeiMa предлагаемого манипулятора.
Манипулятор содержит управляющий / и исполнительный 2 механизмы, представляющие собой многозвенные устройства с «-степенями свободы, связь между которыми осуществляется каналами 3 управления но положению, прямыми каналами 4 отражения нагрузки и перекрестными каналами 5 отражения нагрузки.
Прямые каналы 4 отражения нагрузки включают датчик 6 неуравновешенных моментов и датчик 7 уравновешенных мо.ментоз звеньев исполнительного механизма, а также приемники 8 л оментов звеньев уиравляющего механизма.
Перекрестные каналы 5 отражения нагрузки представляют собой связи между датчиком 7 моментов уравновешенных звеньев и приемниками моментов неуравновещенных звеньев, осуществленные через блоки 9 сравнения сигналов датчиков моментов хравновешенных и неуравновешенных звеньев.
Работа манипулятора происходит следующим образом.
Положение звеньев хчтравляющего мехчиизма / в пространстве непрерывно воспроизводится звеньями исполнительного мехаиизма 2 с помощью каналов 3 управления по положению. Нагрузки, дейсгвующие в звеньях исполнительного мехаиизма, восприиимаются с помощью датчиков 6 и 7 моментов и по прямым каналам 4 отражения нагрузкн поступают в приемники 8 мо.ментов управляющего механизма / позвенно. С помощью перекрестных каналов 5 отражепия нагрузки усилия, деиствующие в уравновешенном звене, поступают в приемникн 8 моментов неуравновешенных звеньев через блоки 9 сравнения сигналов дач чикоа моментов уравновешенных и неуравновешенных звеньев. Максимальный из сравниваемых сигналов воздействует па приемпик момента каждого неуравновешенного зоепа. Это способствует значительному уменьишнию разброса сигналов о величине пагрузки, воспринимаемых приемниками моментов неуравновешенных звеньев в зависимости от их положения в пространстве, а следовательно, уменьтпает влияние моментов неуравновешенности на качество отражения нагрузки.
Предмет и з о б р е т е н н я Дистанциоиио-управляемый копирующий уравновеишнньнт манипулятор, включаюш,
унравляюш;и11 и исполнительный механизмы, связанные между собой каналами управления по положению и прямыми каналами отражения нагрузки, в которых имеются датчики моментов, действуюндих в звеньях исполиительного механизма, н приемники моментов, установленные на уиравляюи1ем механизме, отличающийся тем, что, с нелью уменьшения влияния моментов неуравновен1сииости звеиьев исполнительного механизма на качество отражения нагрузкн, в него введены перекрестные каиалы отражения нагрузки, связываюш,ие датчики моментов уравновешенных звеньев через блоки сравиения сигналов со всеми ириемннками моментов неуравновентенных звеньев.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для компенсации статических моментов манипулятора | 1979 |
|
SU881654A1 |
| ДИСТАНЦИОННЫЙ МАНИПУЛЯТОР | 1973 |
|
SU398386A1 |
| Устройство для управления манипулятором | 1973 |
|
SU552184A1 |
| Устройство для управления звеном очувствленного манипулятора | 1974 |
|
SU517483A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| Способ отражения усилий в системах управления копирующими манипуляторами | 1976 |
|
SU574318A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ РОБОТА | 2002 |
|
RU2230349C2 |
| Устройство для управления манипулятором | 1983 |
|
SU1095130A1 |
| Манипулятор | 1975 |
|
SU529072A1 |
| Устройство для управления манипулятором | 1984 |
|
SU1229728A1 |
