1
Изобретение каеается манипуляторов копирующего тина.
Известен еиособ отражения усилия, заключаюш,ийея в том, что нагрузочные моменты и усилия, возникающие на иснолнительиом органе манинулятора, нреобразуют в электрические сигналы и на их основе формируют уиравляющие сигналы толкателей, которые воздействуют на рукоятку онератора. Сила ощун1,ается, как равномерное давление рукоятки на руку оиератора в каком-либо нанравлеиии, а момент - как нара еил е плечом, равным максимально обхватываемому ладонью расстоянию на рукоятке в плоекоетн действия момента 1.
Однако этот способ не позволяет нолучить иолную информацию о нагрузках, возникаюHj,Hx на иснолиительной стороне манипулятора.
Целью изобретения являетея более полное отражение усилий, возникающих на исполнительном органе манинулятора.
Для этого по предлагаемому епоеобу управляющие епгналы е номощью электродов подаются непоередственно на мыщпы оператора.
Оператор опснивает усили и нагрузочных моментов, возникающих на нсполпительном органе манипулятора, по интенсивности сокращения мыщц.
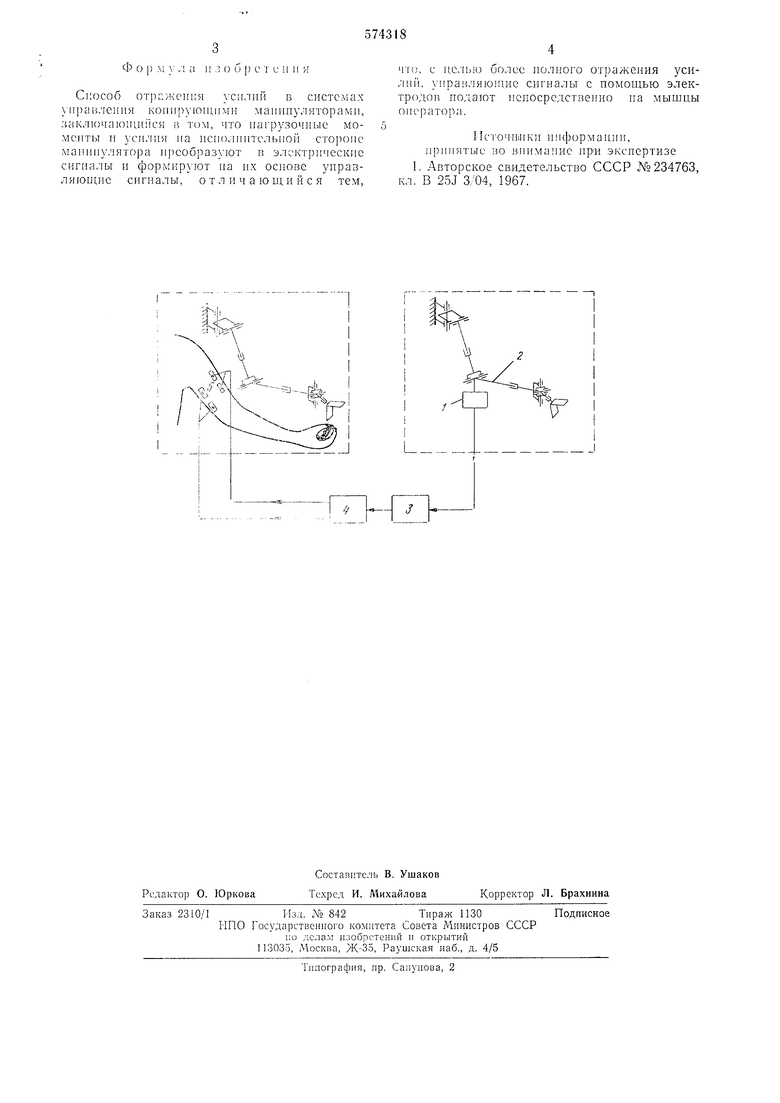
На чертеже нредетавлено уетройетво для реализации предлагаемого еноеоба.
Устройство включает датчики давления, либо rsiOMeHTHbie датчики 1, расположенные на исполнительном органе ман шулятора 2, преобразо;5а7ель 3 мгхан ческих величин в электрические. иравляемый электростпмулятор 4, нодаюнип электричее;;1 е етимулпруюHUic сигналы на электроды 5, г.аложенные на мышны оператора.
УетроГ стио работает след ющим образом.
Усилия и моменты, возникаюндне на иеиолпптсльном органе манипулятора, регистрируются датчиками 1 н преобразуются с помощью преобразователя 3 в электричеекие сигналы, ноступаюплие на управляемый электростимулятор 4. С выхода электростнмулятора енимают электрические стимулирующие сигналы, величины которых пропорциональны усилиям и моментам, возникающим иа исполнительном органе манипулятора. Стимулирующие сигналы посылаются па электроды, иало7с;:нь:с на мыищы оператора, и вызываютих сокращение, пропорнгюиальное уеиЛСНИ1:га иеиолпитсльиом опгане ман пулятора.
В
1КОМ вынолиепии ycTpoiicTBO позволяет
онер атору иепоередственно ощун1ать величиНУ у си л nil ; :спо.- иительном органе манппулятора.
Способ отражения усилий в системах управлении копирующими мапипуляторами, заключаюиипк-я в том, что пагрузочпые моменты и уеи.чия па исиолпптельиой ei0)one манипулятора преобразуют в электрические сигналы и формируют на их основе унравляюн1ие сигналы, о т л и ч а ю И1 и и с я тем,
что, с нелью оолее иолного отражения уси;1нй, унравляютие сигналы с помощью электролов нодают непосредственно на мышцы онер атора.
ИстоЧН1Нки ннформанни, нрннятые во влнмание нри экспертизе 1. Авторское свидетельство СССР Afg 234763, кл. В 25J 3/04, 1967.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления очувствленным манипулятором | 1981 |
|
SU949629A2 |
| Устройство для управления очувствленнымМАНипуляТОРОМ | 1979 |
|
SU842700A1 |
| СПОСОБ ОТРАЖЕНИЯ УСИЛИЙ В СИСТЕМАХ УПРАВЛЕНИЯ | 1973 |
|
SU361868A1 |
| Копирующий манипулятор | 1980 |
|
SU946918A1 |
| Устройство для управления дистан-циОННыМ КОпиРующиМ МАНипуляТОРОМ | 1979 |
|
SU809048A1 |
| Способ управления копирующим манипулятором | 1979 |
|
SU854387A1 |
| Система управления манипулятором | 1978 |
|
SU729545A1 |
| Устройство для управления копирующим манипулятором | 1983 |
|
SU1164657A1 |
| Устройство для управления копирующим манипулятором | 1985 |
|
SU1262447A1 |
| Копирующий манипулятор | 1983 |
|
SU1093542A2 |
3
