1
Известны устройства для передачи груза с одного конвейера «а другие, расположенные под углом друг :к другу, содержащие роликовую батарею, смантврованиую 1на платформе в месте перехода груза.
Однако известные устройства неэффективны.
С целью повышения эффективиости предлагаемое устройство снабжено поворотиым от привода Манипулятором со сменными захватами, установленным ,над роликовой батареей, «а роликах которой заиреплены шестерни, находящиеся в зацеплении с зубчатыми рейками, приводимыми от гидроцилиндров.
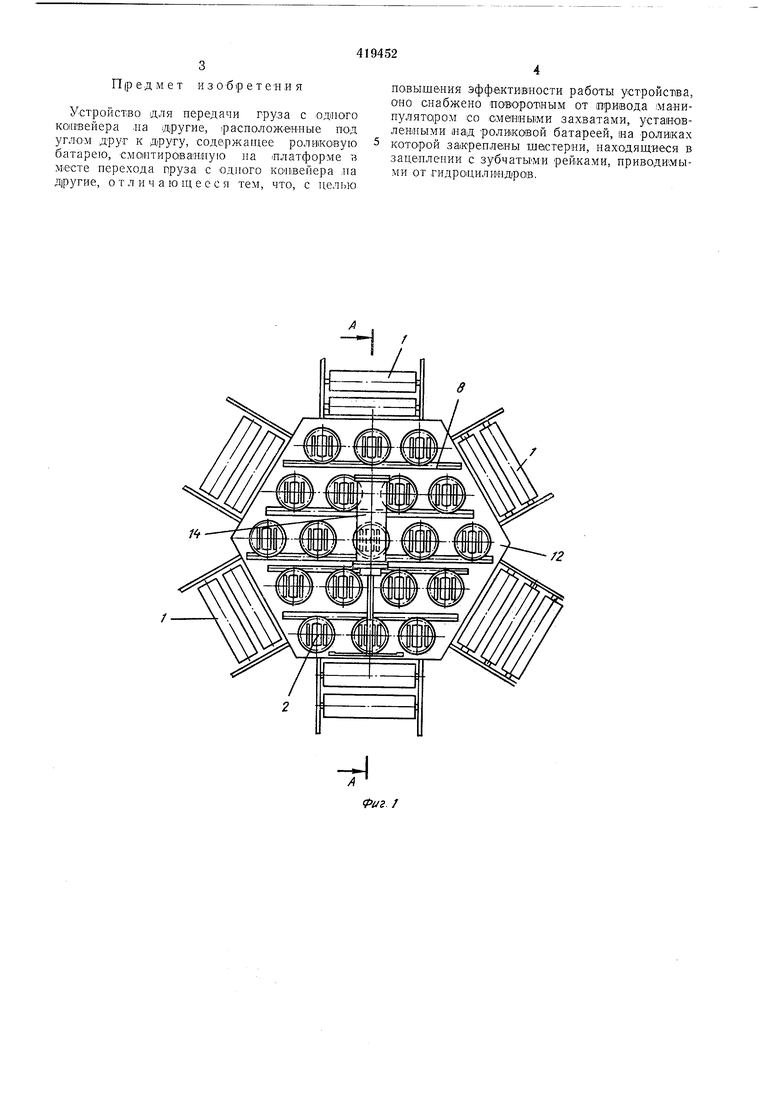
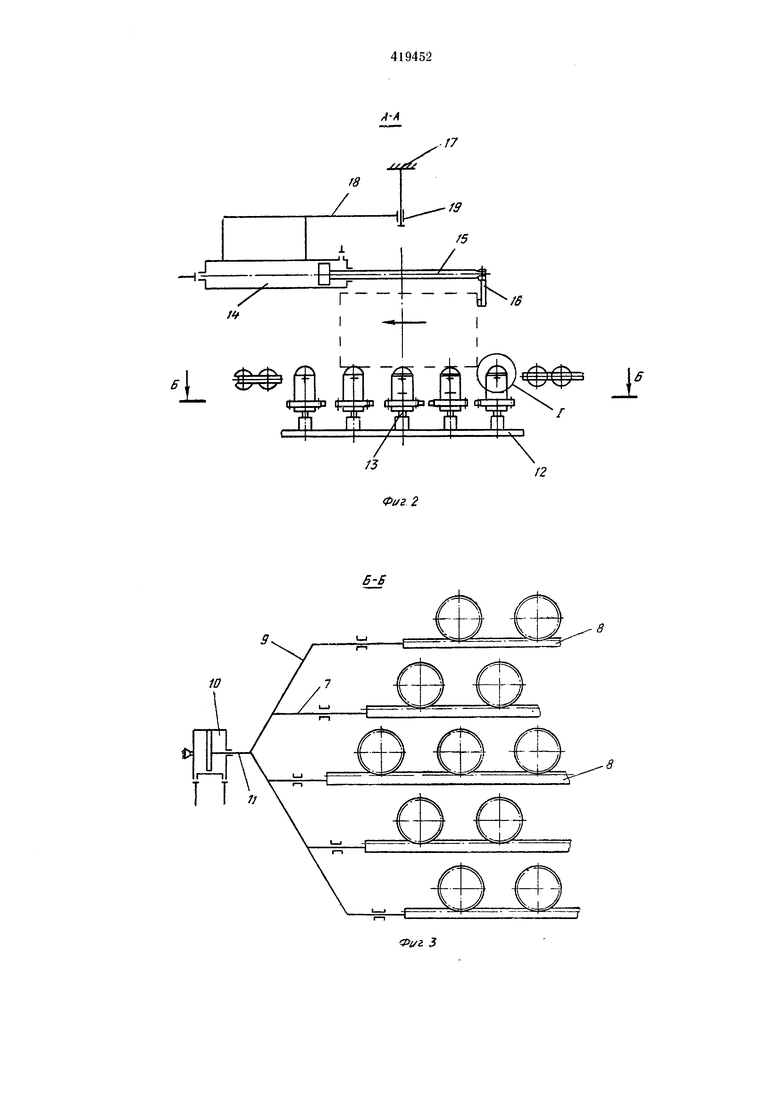
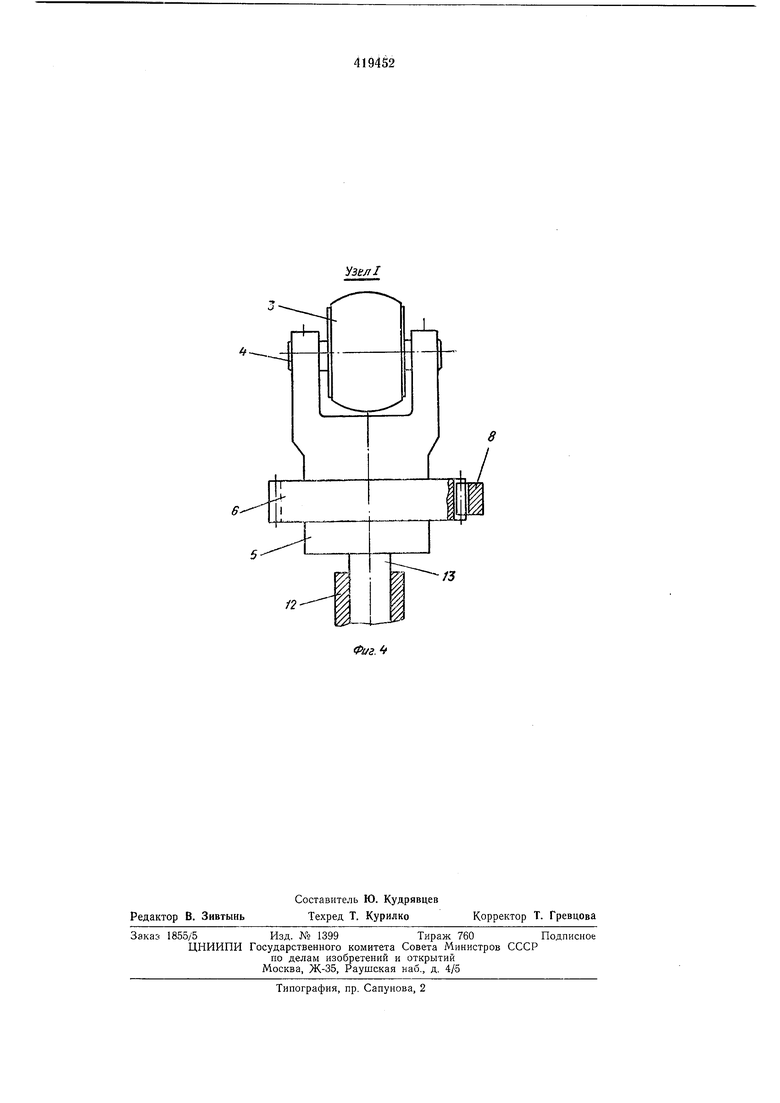
На фиг. 1 Изображено предлагаемое устройство, -вид в плане; на фиг. 2 - разрез по А - А на фиг. 1; на фиг. 3 - разрез по Б - Б на фиг. 2; ща фиг. 4 - узел I «а фиг. 2.
Предлагаемое устройство состоит из конвейеров 1, которые могут быть как подводящими так и отводящими, горичем их количество определяется тех нологическими условиями. В месте схождения жонвейеров установлена роликовая батарея 2, состоящая из расположенных на одной линии в несколько рядов роликов 3, закрепленных на осях 4 в корпусах 5. Па нижних частях iKapnycoiB укреплены шестерни 6, 1взаим.одействующие с реечной гребенкой 7, состоящей из зубчатых реек 8, которые связаны между собой соединительными
элб.ментами (тягами) 9. Кроме того, |рейки связаны с гидроцилиндром 10 поворота роликов через шток 11. Корпуса роликов установлены на платформе 12 при помощи держателей 13, Причем сами ролики выполнены в виде плоских дисков с пупукло криволинейной рабочей поверхностью. Над роликовой батареей установлен маиипулятар, выполаюпныГ В виде гидроцилиндра 14 со шгоком 15, на котором крепится сменный захват 16. Гидроцилиндр К|репится к балке 17 носредством кронштейна 18 и шарнира 19.
Устройство работает следующим образом.
Груз, транспортируемый по одно.му из конвейеров, перемещается на центр роликовой батареи захватом манипулятора, После чего включается гидроцилиндр поворота роликов, который через щток и гребенку возде11ствует на их щестерни и поворачивает ролики на определенный угол, зависящий от расположения отводящего конвейера.
В результате того, что ролики имеют выпукло-криволинейную рабочую поверхность, груз При их развороте остается на месте. После разворота роликов манипулято|р поворачивается на тот же угол и захватом неремещает груз на отводящий конвейер.
В зависимости от габаритов, формы и веса пруза захват выполнен сменным.
Предмет и з о б р е т е -н .и я
Устройстао для передачи груза с одишго конвейера па другие, располож-еННые под углом друг к другу, соде.ржащее роликовую батарею, смоттироватную ла -платформе з месте перехода груза с одпого коашейера ;Па другие, отличающееся тем, что, с целью
повышения эффективности работы устройства, Оно снабжено поворопным от привода ма-нипулято|ром со смееиыми захватами, установлеиными иад роликовой батареей, на роликах которой закреплены шестерни, находящиеся в зацеллении с зубчатыми рейками, приводимыми от гидрощилнНдрое.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи груза с одного конвейера на другие | 1975 |
|
SU571423A1 |
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |
| Поточная линия для обработки кромок стекол | 1990 |
|
SU1728139A1 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
| Кран-штабелер транспортно-накопительной системы | 1987 |
|
SU1615077A1 |
| Мобильное устройство для монтажа и демонтажа вагонных дверей | 2022 |
|
RU2791355C1 |
| Захват манипулятора | 1976 |
|
SU590238A1 |
| СПОСОБ ПЕРЕДАЧИ СТЕКЛЯННОГО ЛИСТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2092460C1 |
| Вырубочная головка к прессу для вырубки деталей | 1984 |
|
SU1313416A1 |
| Автооператор к автомату контроля магнитопроводов | 1984 |
|
SU1259347A1 |
/7
jUJSU
Jf
10
t
1)
f
I-1 L.
- -f
1-I 12
/5
