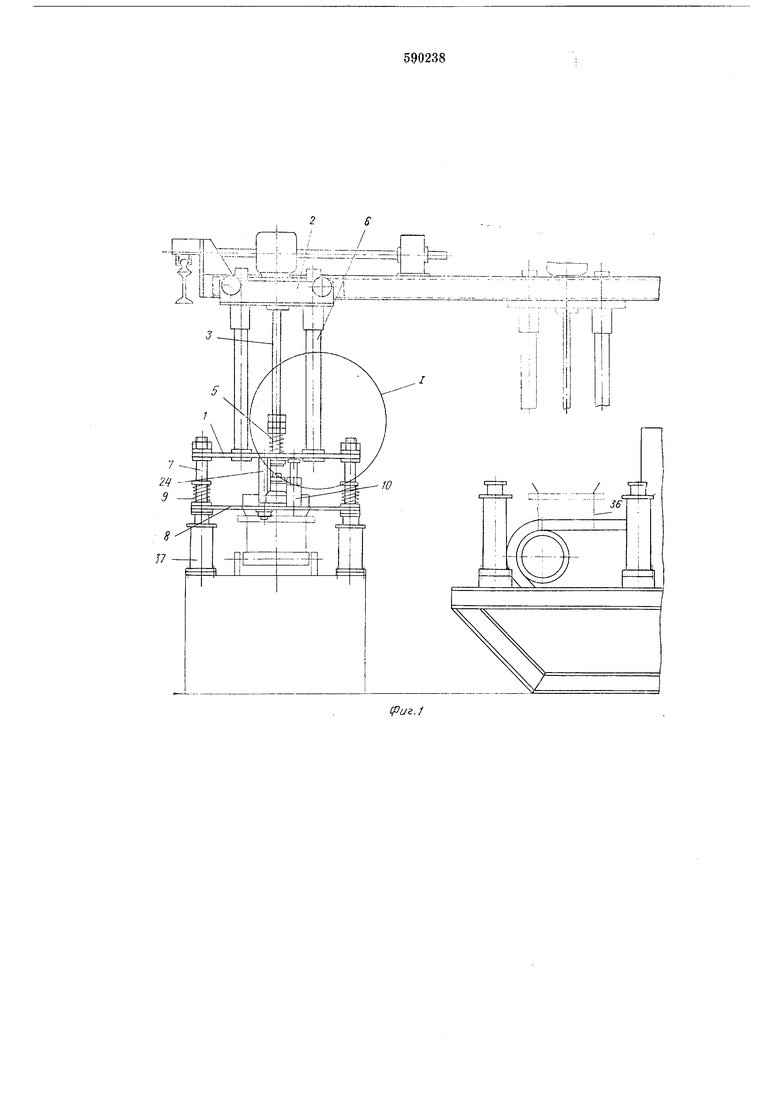
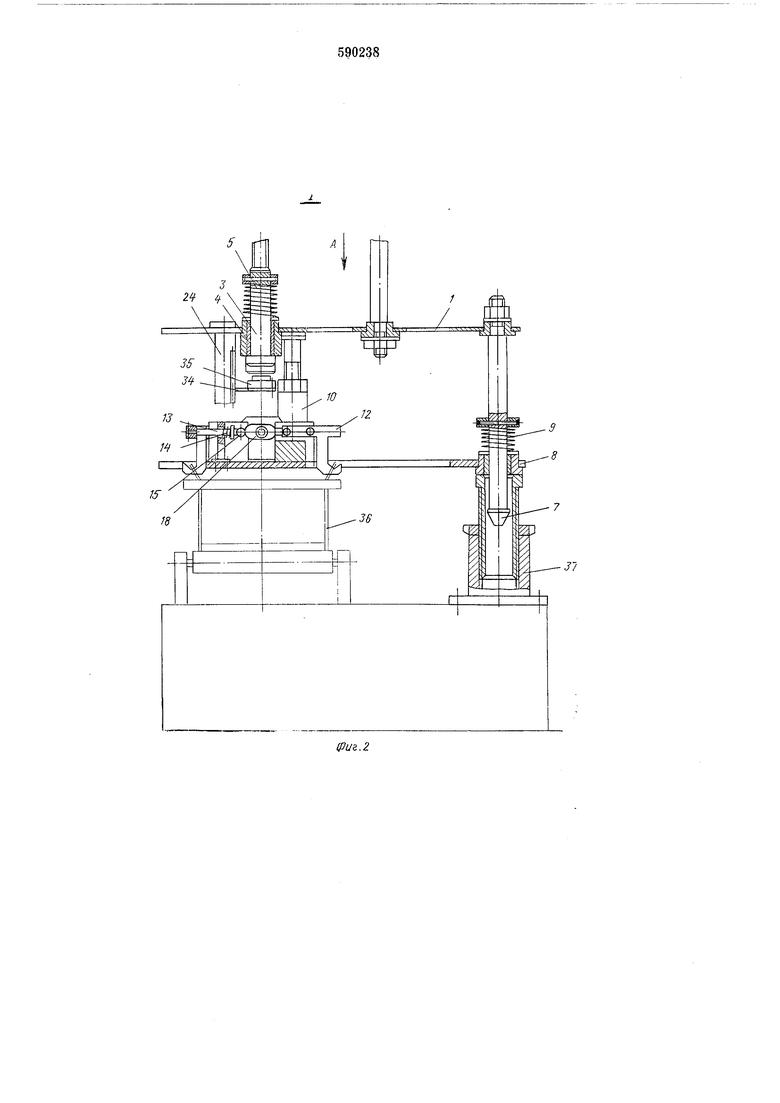
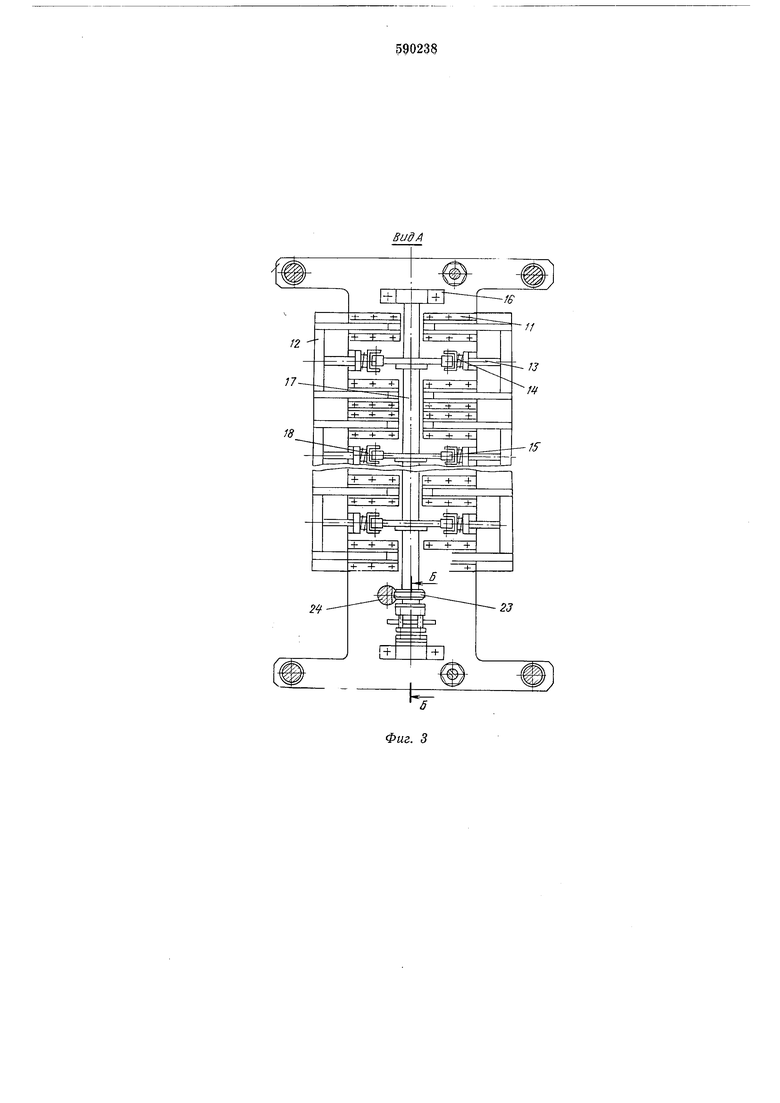
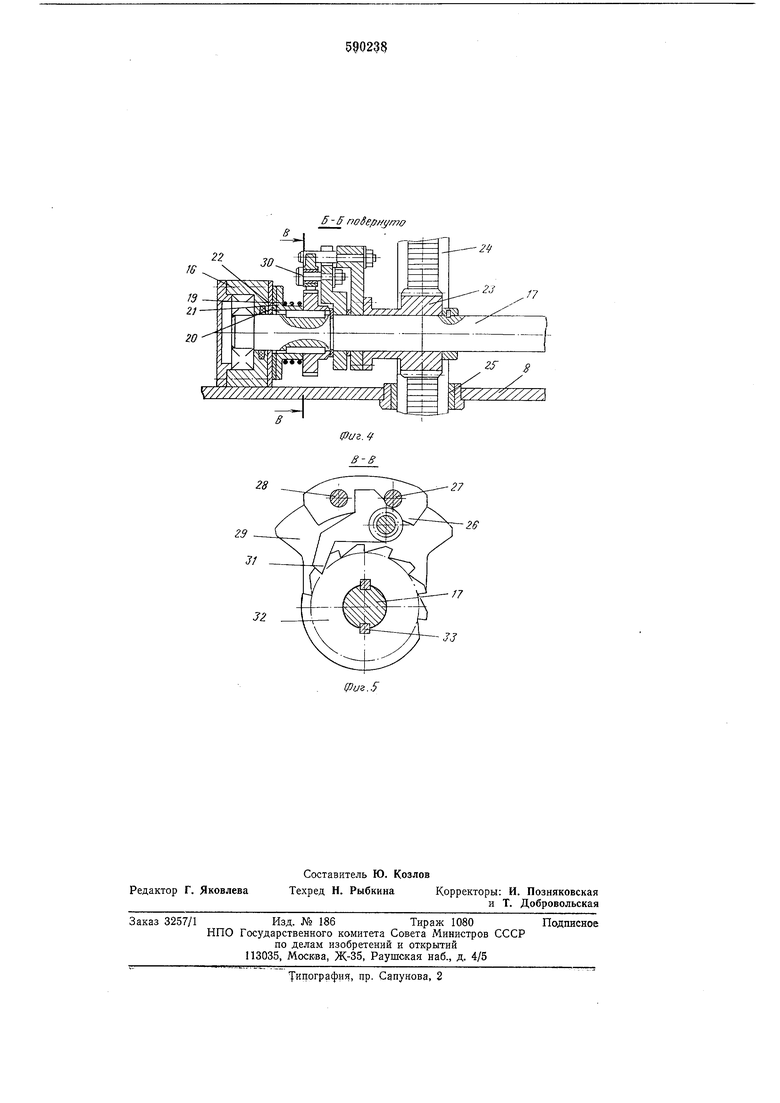
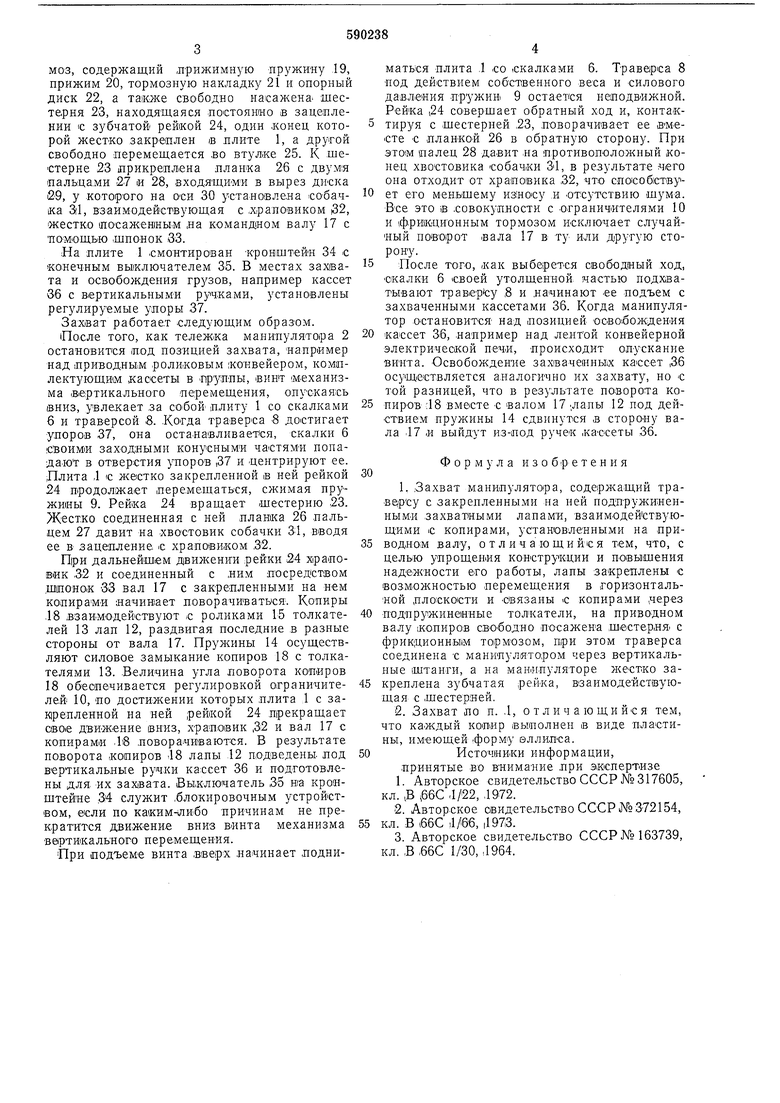
моз, содержащий ,прижимн)ю пружину ,19, прижим 20, тормозную накладку 21 и опорный диск 22, а та|юке свободно на1сажена. шестерня 2:3, находящаяся постоянио в заценлении € зубчато рейкой 24, один .конец которой жестко закреплен /в ллите 1, а другой свободно перемещается .во втулке 25. К шестерне 23 лрикреплена лланка 26 с двумя пальцами 27 и 28, входящими в вырез диска 29, у которого на оси 30 устано1вле.на -собачка 31, взаимодействующая с ,х,рапо1виком 32, жестко (Посаженным ,на командном валу 17 с ПОМОЩЬЮ щ пои о к 3:3. На ллите 1 смонтирован -кронщтейн 34 с конечным выключателем 35. В местах захвата и освобождения грузов, например кассет 36 с вертикальными ручками, установлены регулируемые упоры 37. SaxjBaT работает .следующим образом. После того, как тележка манипулято1ра 2 остановится под позицией захвата, например над лриводньш .роликовым конвейером, комплектующим кассеты в Лруппы, еивт м.еханизма (Вертикального -перемещения, опускаясь вниз, у влекает .за собой плиту 1 со скалками 6 и траверсой 8. .Когда траверса 8 достигает упоров .37, она оста.навливается, скалки 6 своими заходными конусными частями нопада.ют в отверстия упоров 37 и центрируют ее. Длита .1 с жестко закрепленной в ней рейкой 24 продо.л,жает перемещаться, сжимая пружины 9. Рейка 24 вращает шестерню 23. Жестко соединенная с ней плавка 26 .пальцем 27 давит на .хвостовик собачки , вводя ее в зацепление с храповиком 32. П|ри дальнейщем движении рейки 24 яраповик .32 и соединенный с ним посредством шпонок 33 вал 17 с закрепленными на нем колирам.и начинает поворачиваться.. Копиры .18 взаимодействуют с роликами 15 толкателей 13 лап 12, раздвигая последние в разные стороны от вала 17. 14 осуществляют силовое замыкание копиров 18 с толкателями 13. .Величина угла поворота копиров 18 обеспечивается регулировкой ограничителей 10, по достижении которых плита 1 с заК1репленной на ней рейкой 24 .прекращает авое движение вниз, храповик 32 и вал 17 с копирами .IS поворачиваются. В результате поворота копиров 18 лапы .12 подведены, под вертикальные ручки кассет 36 и подготовлены для их зах1вата. Выключатель 35 н/а кронштейне 34 служит .блокировочным устройством, если по каким-шИбо причинам не прекратится дви.ж.ение вниз винта механизма в ерт ика льн ого пер емеще ни я. При подъеме винта .вверх начинает подниматься плита ,1 со скалками 6. Траверса 8 под действием собственного веса и силового давления лружив 9 остается неподвижной. Рейка |24 совершает обратный ход и, контактируя с шестерней .23, поворачивает ее вместе с планкой 26 в обратную сторону. При этом палец 28 давит .на противоположный конец хвостовика собачки 31, в результате чего она отходит от храповика .32, что cnoico6cTiBy ет его меньщему износу ,и .отсутствию шума. Все это в совокупности с .ограничителями 10 и ф.ри1К|Ционным тормозом исключает случайный поворот вала 17 в ту ЕЛИ другую сторону. После того, как выберется свободный ход, скалки 6 своей утолщенной на.стью подх;ватывают траверзу 8 и начинают ее подъем с захваченными кассетами 36. Когда манипулятор остановится над позицией осво.божден«я кассет 36, .например над .лентой конвейерной электрической печи, происходит опускание винта. Освобождение захваченных кассет 36 осуществляется а.налогично их захвату, но с той разницей, что в результате поворота копиров :18 вместе с валом 17.лапы 12 под дей.ствием пружины 14 сдвинутся в сторону вала .17 и выйдут из-под ручек кассеты 36. Формула изоб ретения 1. Захват манипулятора, содержа.щий траве)рсу с закрепленными на ней нодпружиненным.и захватными лапами, взаимодействующими с копирами, установленными на .приводно;м валу, отличающийся тем, что, с целью упрощения конструкции и повыщения паде.Жпости его работы, лапы закреплены с возможностью .перемещения в горизонтальной (ПЛОСКОСТИ и .связаны с копирами через подпру жиненные толкатели, на приводном валу (Копиров свОбодно посажен-а щестерня с фрикционным тормозом, при этом траверса соединена с манипулятором через вертикальные штанги, а на манипуляторе жестко закреплена зубчатая рейка, взаимодействующая с шестерней, 2. Захват по п. .1, отличающийся тем, то ка.ждый копир выполнен в виде пластины, имеющей .форму элли.цса. Источники информации, .принятые во внимание .при экспертизе 1.Авторское свидетельство СССР №317605, л. 3 i66C 1/22, .1972. 2.Авторское овпдетельство СССР №:372154, л. .В |66С ;1/66, |1973. 3.Авторское свидетельство СССР №163739, л. .В,66С 1/30, ,1964.
Б-5 подернуто
16
,
//////////////Х////////777).
в
Фиг.
28
32 S-g
27
/7
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ НАПИЛЬНИКОВ | 1971 |
|
SU426735A1 |
| Устройство для постановки царги на сиденье кухонного стула | 1980 |
|
SU874340A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Устройство для группирований флаконов и укладки их в ящики | 1981 |
|
SU971712A1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| СТАНОК ДЛЯ ПРАВКИ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ В ПРОЦЕССЕ ТЕРМООБРАБОТКИ | 1970 |
|
SU272793A1 |
| Устройство для приварки анодов конденсаторов к рейкам и сборки реек в кассеты | 1977 |
|
SU736193A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Устройство для вырубки изделий из листового и ленточного материалов | 1978 |
|
SU753670A1 |
| Устройство для маркировки изделий | 1983 |
|
SU1141022A1 |