Изобретение относится к оборудованию для автоматизации и механизации технологических процессов, а именно к автооператорам для манипулирования магнитопровода- ми в процессе их изготовления, сборки, контроля, и может быть использовано в автоматических линиях.
Целью изобретения является повышение производительности.
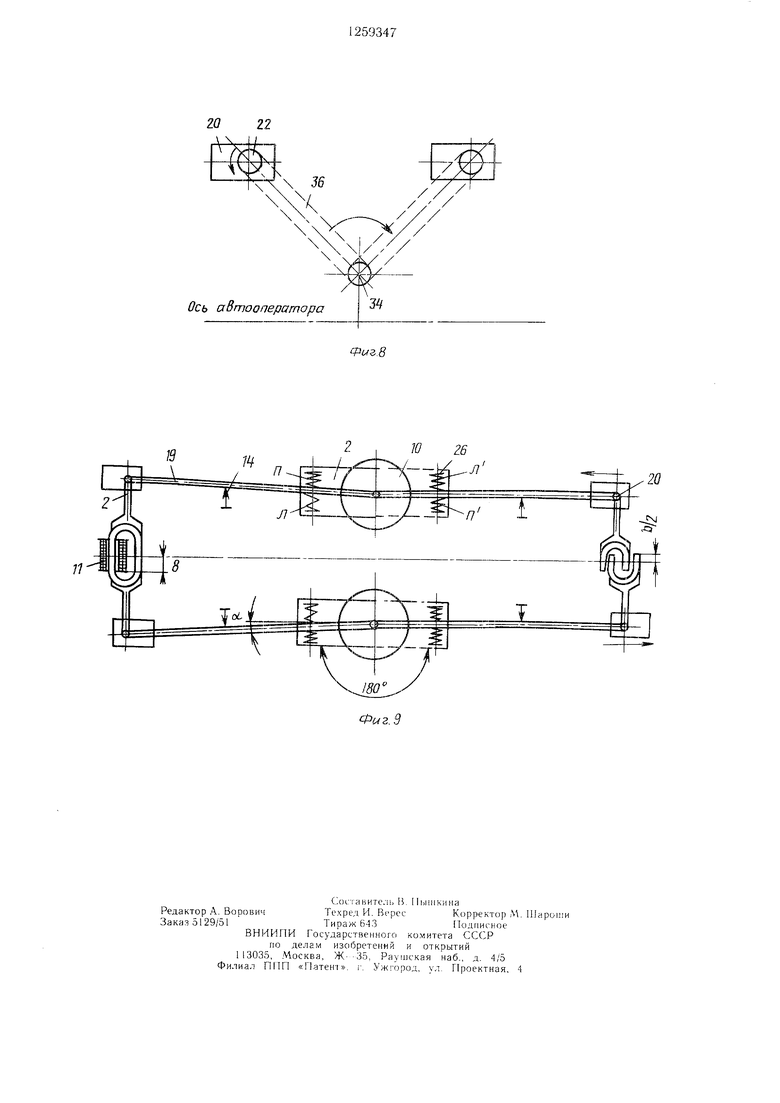
На фиг. 1 изображена кинематическая схема автооператора; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - схема механизма подачи и отвода магнитопроводов; на фиг. 4 вид Б на фиг. 3; на фиг. 5 --- механизм коррекции стола для установки магнитопроводов; на фиг. 6 - вид В на фиг. 5; на фиг. 7 механизм фиксации магнитопроводов; на фиг. 8 - схема движения поворотного стола; на фиг. 9 - схема уплотненной стыковки магнитопроводов.
Автооператор состоит из механизма 1 подачи и отвода магнитопроводов, снабженного электромеханическими механизмами 2 для захвата, подводящего 3 и отводящего 4 лотков и пневмопривода 5, смонтированных на общем основании, а также содержит приемный стол 6, стол 7 для установки магнитопроводов при контроле и раз- браковочный стол 8, две двусторонние зубчатые рейки 9, жестко связанные со штоком пневмопривода 5 и находящиеся в зацеплении с зубчатыми колесами 10. На столе 7 установлена измерительная кату1ика 1, механизм 12 коррекции положения стола 7 и механизм 13 фиксации магнитопровода. В корпусе автооператора смонтированы регулируемые упоры 14 для ограничения угла разворота механизмов 1. На штанге 15, соединяющей зубчатые рейки 9, установлены толкатели 16 и 17 для перемещения магнитопроводов, а также регулируемые упоры 18 для коррекции положения стола 7.
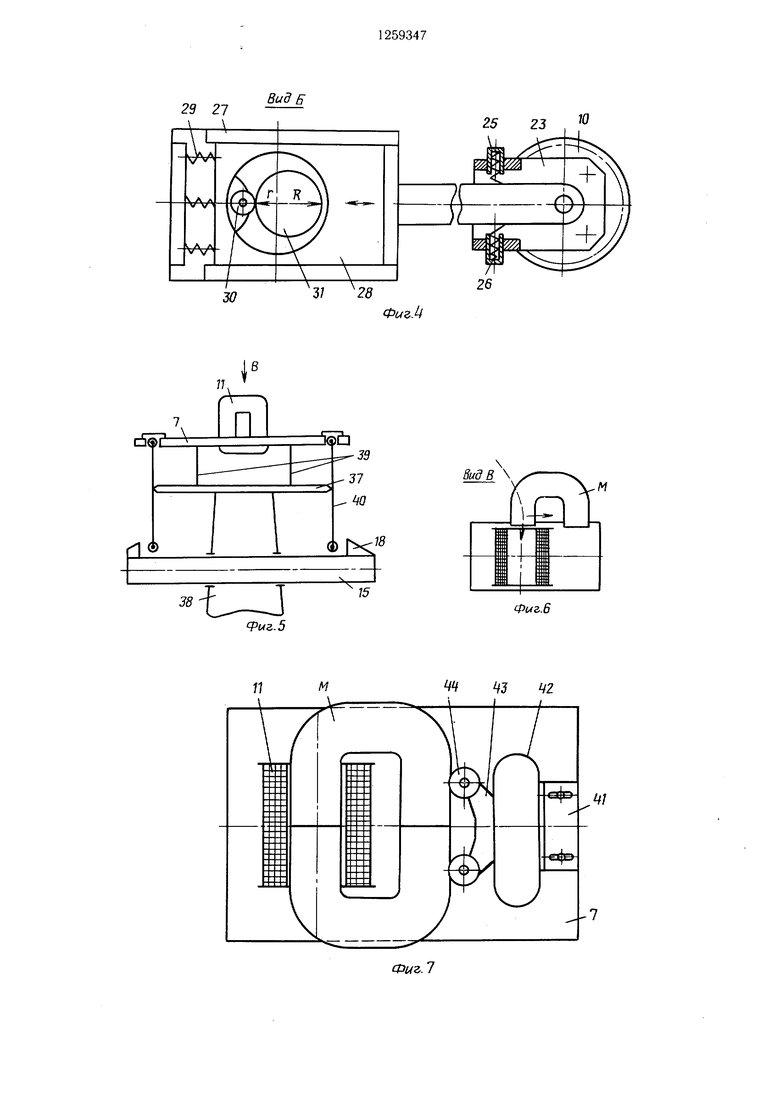
Механизм 1 состоит из рычагов 19, шар- нирно закрепленных на оси зубчатого колеса 10, поворотного стола 20, жестко соединенного через втулку 21 с зубчатым шкивом 22, и платформы 23, закрепленной на зубчатом колесе 10. На платформе 23 установлена обойма 24 с регулируемыми патронами 25 и пружинами 26, опирающимися на боковые поверхности рычагов 19.
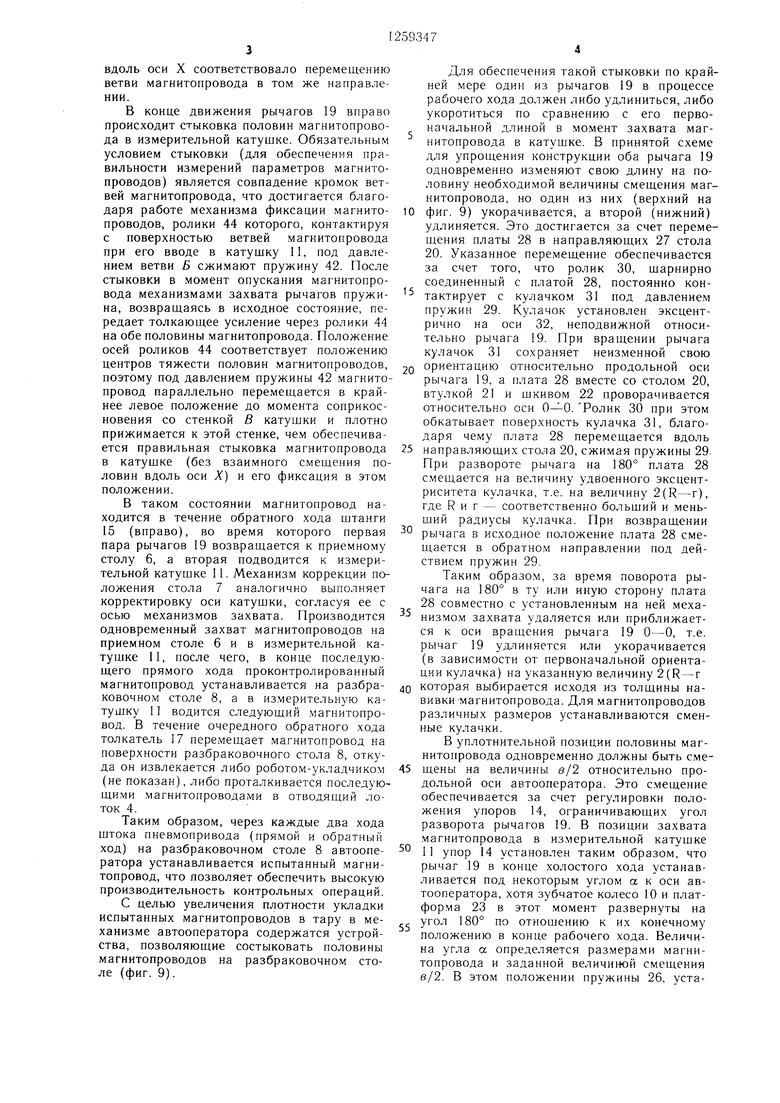
Стол 20 содержит две направляющие планки 27 и подвижную плату 28, опирающуюся на пружины 29. Ролик 30 шарнирно соединен с платой 28, а эксцентриковый кулачок 31 жестко установлен на оси 32, неподвижно соединенной с рычагом 19 с помощью кронщтейна 33. Шкив 34, жестко установленный на оси 35 вращения рычага 19, соединен зубчатым ремнем 36 со шкивом 22, образуя планетарный механизм движения стола 20.
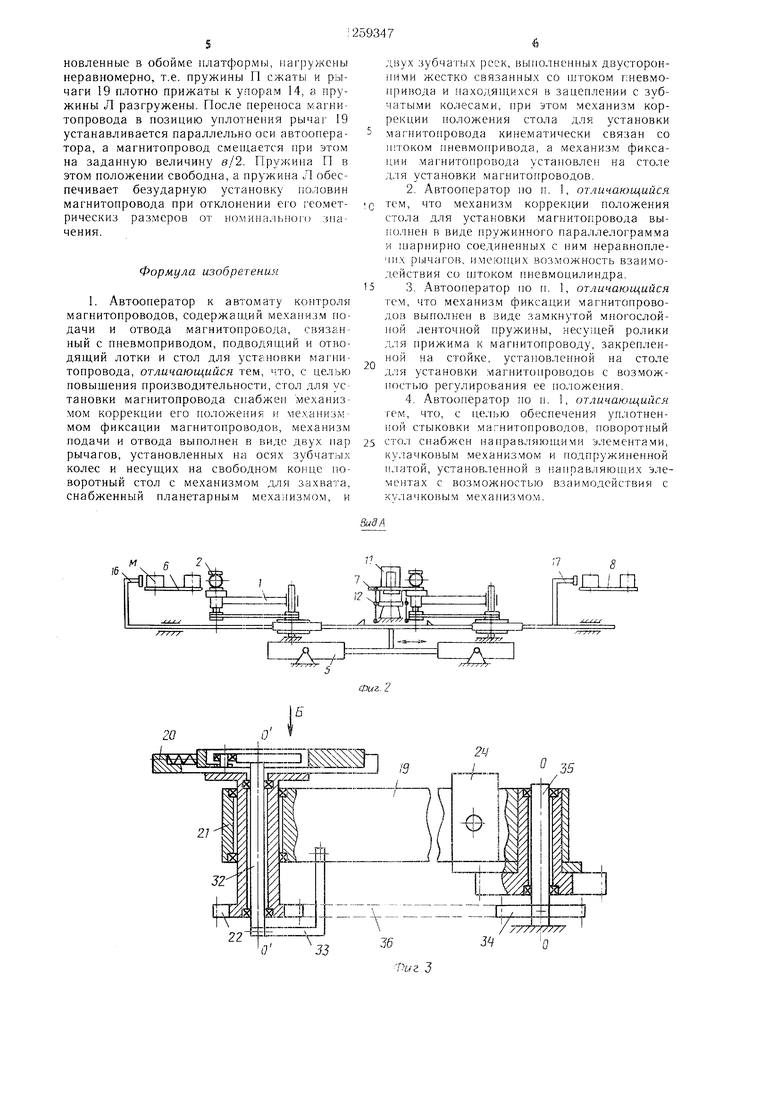
Механизм коррекции положения стола 7 содержит плату 37, закрепленную на стойке 38, иа которой установлены две плоские пружины 39 и шарнирно закреп0
лены два неравноплечих рычага 40. Стол 7 с закрепленной на нем измерительной катушкой 11 установлен на пружинах 39, образуя вместе с ними и платой 37 пружинный параллелограмм. На концах рычагов
40 смонтирваны ролики, входящие в пазы стола 7, и ролики, контактирующие с упором 18 при перем:ещении штанги 15.
Механизм фиксации магнитопроводов установлен на столе 7 и содержит регулируемую стойку 41 с закрепленной на ней замкнутой многослойной ленточной пружиной 42, на поверхности которой разме- 1цена обойма 43 с двумя прижимными роликами 44. Плоская внутренняя стенка В каркаса измерительной катушки 11 выполнена
5 из листа износостойкой стали и является опорной поверхностью для базирвания ветвей магнитопровода.
Автооператор работает следующим образом.
.Магнитопроводы М, расположенные це- гью на подводящем лотке 3, перемещаются толкателем внешнего привода до момента установки первого на приемном столе 6. Толкатель 16, двигаясь вправо вместе со штангой 15, перемещает магнитопровод на
5 поверхности стола в позицию захвата (фиг. 1). Одновременно с этим рычаги 19, приводимые в движение рейками 9, разворачиваются в сторону приемного стола до момента контактирования с упорами 14. В этом положении каждый механизм 2 захва0 та захватывает половинку магнитопровода и игганга 5 начинает движение в противоположном направлении (влево - прямой ход), при этом рычаги 19 разворачиваются в сторону разбраковочного стола 8 до наложения на упоры 14. В процессе переме5 щения рычагов 19 из крайнего левого в крайнее правое положение стол 20 с механиз мом для захвата и половинкой магнитопровода совершает плоскопараллельное перемещение, сохраняя первоначальную ориентацию половин магнитопроводов. Этот эффект обеспечивается планетарным механиз- .мом, ремень 36 которого, обкатываясь по поверхности неподвижного шкива 34, вращает шкив 22 и вместе с ним - стол 20 в направлении, обратном движению рычага
5 19, с равной угловой скоростью за счет равенства диаметров шкивов. При всех последующим перемещениях рычагов 19 ориентация стола 20 остается той же.
В момент приближения половин магнитопроводов к измерительной катушке 11 упор
0 18, воздействуя через рычаг 40, перемещает стол 7 с измерительной катушкой 11 в направлении оси X, корректируя положение оси KaTynjKH для обеспечения соос- ного ввода ветви А магнитопровода в катушку, так как магнитопровод, перемещаясь плоскопаралле.льно по дуге окружности, одновременно движется вдоль двух осей X и У. Длина плеч рычага 40 подобрана таким образом, чтобы смеш.ение катушки
5
вдоль оси X соответствовало перемещению ветви магнитопровода в том же направлении.
В конце движения рычагов 19 вправо происходит стыковка половин магнитопровода в измерительной катушке. Обязательным условием стыковки (для обеспечения правильности измерений параметров магнито- проводов) является совпадение кромок ветвей магнитопровода, что достигается благоДля обеспечения такой стыковки по крайней мере один из рычагов 19 в процессе рабочего хода должен либо удлиниться, либо укоротиться по сравнению с его первоначальной длиной в момент захвата магнитопровода в катушке. В принятой схеме для упрощения конструкции оба рычага 19 одновременно изменяют свою длину на половину необходимой величины смещения магнитопровода, но один из них (верхний на
даря работе механизма фиксации магнито- ю фиг. 9) укорачивается, а второй (нижний)
проводов, ролики 44 которого, контактируя с поверхностью ветвей магнитопровода при его вводе в катушку 11, под давлением ветви Б сжимают пружину 42. После стыковки в момент опускания магнитопровода механизмами захвата рычагов пружина, возвращаясь в исходное состояние, передает толкающее усиление через ролики 44 на обе половины магнитопровода. Положение осей роликов 44 соответствует положению
15
удлиняется. Это достигается за счет перемещения платы 28 в направляющих 27 стола 20. Указанное перемещение обеспечивается за счет того, что ролик 30, щарнирно соединенный с платой 28, постоянно контактирует с кулачком 31 под давлением пружин 29. Кулачок установлен эксцентрично на оси 32, неподвижной относительно рычага 19. При вращении рычага кулачок 31 сохраняет неизменной свою
центров тяжести половин магнитопроводов, о ориентацию относительно продольной оси
поэтому под давлением пружины 42 магнито- провод параллельно перемещается в крайнее левое положение до момента соприкосновения со стенкой В катущки и плотно прижимается к этой стенке, чем обеспечиваположении.
В таком состоянии магнитопровод находится в течение обратного хода щтанги
рычага 19, а плата 28 вместе со столом 20, втулкой 2 и щкивом 22 проворачивается относительно оси . Ролик 30 при этом обкатывает поверхность кулачка 31, благодаря чему плата 28 перемещается вдоль ется правильная стыковка магнитопровода 25 направляющих стола 20, сжимая пружины 29. в катущке (без взаимного смещения по- При развороте рычага на 180° плата 28 ловин вдоль оси X) и его фиксация в этомсмещается на величину удвоенного эксцентриситета кулачка, т.е. на величину 2(R-г), гд,е R и г - соответственно больщий и меньший радиусы кулачка. При возвращении
15 (вправо), во время которого первая 30 рычага в исходное положение плата 28 сме- пара рычагов 19 возвращается к приемномущается в обратном направлении под дейстолу 6, а вторая подводится к измерительной катущке 11. Механизм коррекции па- ложения стола 7 аналогично выполняет корректировку оси катущки, согласуя ее с осью механизмов захвата. Производится
35
ствием пружин 29.
Таким образом, за время поворота рычага на 180° в ту или иную сторону плата 28 совместно с установленным на ней механизмом захвата удаляется или приближается к оси вращения рычага 19 О-О, т.е. рычаг 19 удлиняется или укорачивается (в зависимости от первоначальной ориентации кулачка) на указанную величину 2(R-г
одновременный захват магнитопроводов на приемном столе бив измерительной катущке 11, после чего, в конце последующего прямого хода проконтролированный
Таким образом, за время поворота рычага на 180° в ту или иную сторону плата 28 совместно с установленным на ней механизмом захвата удаляется или приближается к оси вращения рычага 19 О-О, т.е. рычаг 19 удлиняется или укорачивается (в зависимости от первоначальной ориентации кулачка) на указанную величину 2(R-г
магнитопровод устанавливается на разбра- о которая выбирается исходя из толщины наковочном столе 8, а в измерительную катушку 11 водится следующий магнитопровод. В течение очередного обратного хода толкатель 17 перемещает магнитопровод на поверхности разбраковочного стола 8, откуда он извлекается либо роботом-укладчиком (не показан), либо проталкивается последую- щи.ми магнитопроводами в отводящий лоток 4.
Таким образом, через каждые два хода штока пневмопривода (прямой и обратный ход) на разбраковочном столе 8 автооператора устанавливается испытанный магнитопровод, что позволяет обеспечить высокую производительность контрольных операций.
С целью увеличения плотности укладки испытанных магнитопроводов в тару в механизме автооператора содержатся устройства, позволяющие состыковать половины магнитопроводов на разбраковочном столе (фиг. 9).
вивки магнитопровода. Для магнитопроводов различных размеров устанавливаются сменные кулачки.
В уплотнительной позиции половины магнитопровода одновременно должны быть сме45 щены на величины в/2 относительно продольной оси автооператора. Это смещение обеспечивается за счет регулировки положения упоров 14, ограничивающих угол разворота рычагов 19. В позиции захвата .магнитопровода в измерительной катушке
I1 упор 14 установлен таким образом, что рычаг 19 в конце холостого хода устанавливается под некоторым углом а к оси автооператора, хотя зубчатое колесо 10 и платформа 23 в этот момент развернуты на угол 180° по отношению к их конечному положению в конце рабочего хода. Величина угла а определяется размерами магнитопровода и заданной величиной смещения в/2. В этом положении пружины 26, уста55
Для обеспечения такой стыковки по крайней мере один из рычагов 19 в процессе рабочего хода должен либо удлиниться, либо укоротиться по сравнению с его первоначальной длиной в момент захвата магнитопровода в катушке. В принятой схеме для упрощения конструкции оба рычага 19 одновременно изменяют свою длину на половину необходимой величины смещения магнитопровода, но один из них (верхний на
фиг. 9) укорачивается, а второй (нижний)
удлиняется. Это достигается за счет перемещения платы 28 в направляющих 27 стола 20. Указанное перемещение обеспечивается за счет того, что ролик 30, щарнирно соединенный с платой 28, постоянно контактирует с кулачком 31 под давлением пружин 29. Кулачок установлен эксцентрично на оси 32, неподвижной относительно рычага 19. При вращении рычага кулачок 31 сохраняет неизменной свою
ствием пружин 29.
Таким образом, за время поворота рычага на 180° в ту или иную сторону плата 28 совместно с установленным на ней механизмом захвата удаляется или приближается к оси вращения рычага 19 О-О, т.е. рычаг 19 удлиняется или укорачивается (в зависимости от первоначальной ориентации кулачка) на указанную величину 2(R-г
которая выбирается исходя из толщины накоторая выбирается исходя из толщины навивки магнитопровода. Для магнитопроводов различных размеров устанавливаются сменные кулачки.
В уплотнительной позиции половины магнитопровода одновременно должны быть смещены на величины в/2 относительно продольной оси автооператора. Это смещение обеспечивается за счет регулировки положения упоров 14, ограничивающих угол разворота рычагов 19. В позиции захвата .магнитопровода в измерительной катушке
I1 упор 14 установлен таким образом, что рычаг 19 в конце холостого хода устанавливается под некоторым углом а к оси автооператора, хотя зубчатое колесо 10 и платформа 23 в этот момент развернуты на угол 180° по отношению к их конечному положению в конце рабочего хода. Величина угла а определяется размерами магнитопровода и заданной величиной смещения в/2. В этом положении пружины 26, уста
новленные в обойме платформы, нагружены неравномерно, т.е. пружины П сжаты и рычаги 19 плотно прижаты к упорам 14, а пружины Л разгружены. После переноса кагни- топровода в позицию уплотнения рычаг 19 устанавливается параллельно оси автооператора, а магнитопровод смещается при этом на заданную величину в/2. Пружина П t этом положении свободна, а пружин.а Л обеспечивает безударную установку половин магнитопровода при отклонении ei o гео.мет- рическиз размеров от номинального значения.
Формула изобретения
1. Автооператор к автомату контроля магнитопроводов, содержап.1,ий механизм подачи и отвода магнитопровода, связанный с пневмоприводом, подводящий и отводящий лотки и стол для установки магнитопровода, отличающийся тем, «.то, с целью повышения производительности, стол для ус тановки магнитопровода снабжен механизмом коррекции его положения н механизм- мом фиксации магнитопроводов, механизм подачи и отвода выполнен в двух нар рычагов, установленных на осях зубчатых колес и несущих на свободном конце поворотный стол с механизмом для захвата, снабженный планетарным механизмом, и
5
0
5
двух зубчаи кх реек, в 51полненных двусторонними жестко связанных со нггоком пневмопривода и находящихся в зацеплении с зубчатыми колеса., при этом механиз.м коррекции положения стола для установки магнитонровода кинематически связан со HiTOKo.M пневмопривода, а механизм фикса- lU-iH магнитонрОБОда установлен на столе для установки магнитопроводов.
2.Автооператор но п. 1, отличающийся тем, что механизм коррекции положения стола для установки магнитопровода выполнен в виде пружинного параллело1 рамма и щарнирно соединенных с ним неравноплечих рычаго15, имеюни1х возможность взаимодействия со HJTOKOM пневмоцилиндра.
3.Автооператор по п. 1, отличающийся тем, что механизм фиксации магнитопроводов выполнен в виде замкнутой мно1 ослой- ной ленточной пружины, несун ей ролики для прижима к магнитопроводу, закрепленной на стойке, установленной на столе для установки магнитопроводов с возможностью регулирования ее положения.
4.AoTOOiiepaTop по н. 1, отличающийся тем, что, с це.1ью обеспечения уп;1отнен- ной стыковки .магнитопроводов, поворотный стол снабжен направляющими элемента.ми, кулачковым механкз.мом и подпружиненной цитатой, установленной в 1 аправляю1н.их элементах с возможностью взаимодействия с ху. 1ачковым механизмом.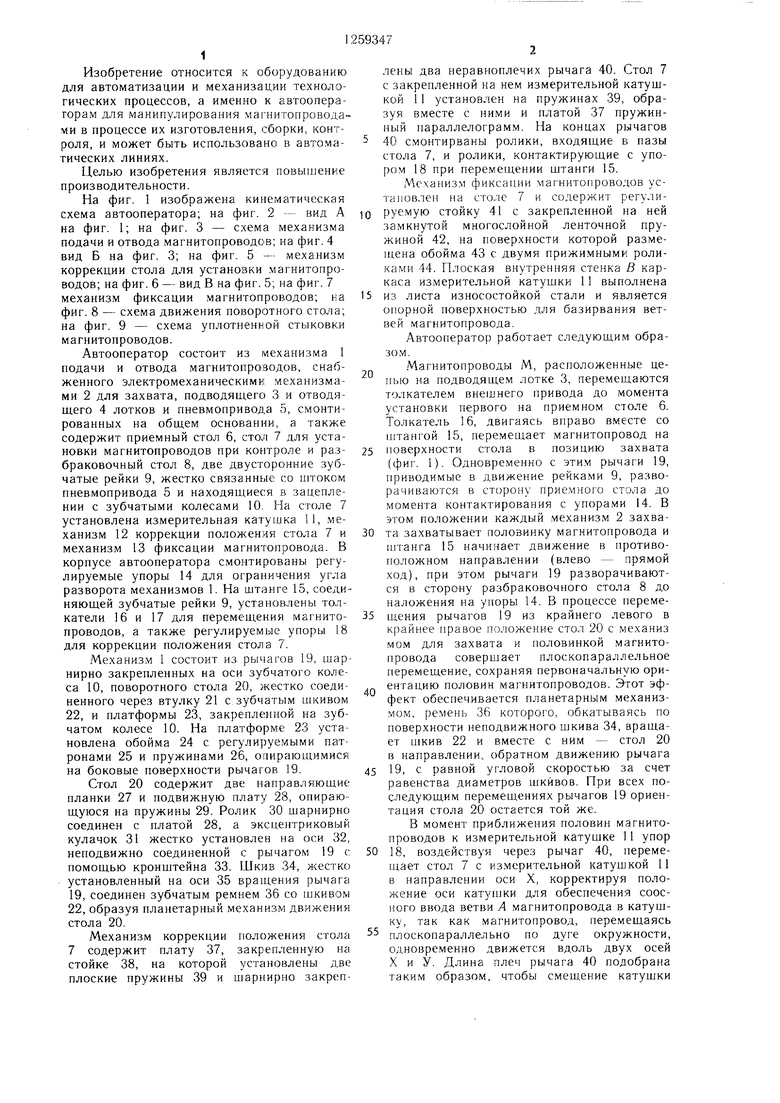
| название | год | авторы | номер документа |
|---|---|---|---|
| Полуавтомат для сборки пластинчатых магнитопроводов трансформаторов | 1983 |
|
SU1176395A1 |
| Станок для доводки наружных цилиндрических поверхностей деталей | 1986 |
|
SU1364447A2 |
| Устройство для установки на печатные платы радиоэлементов, преимущественно поверхностного монтажа | 1988 |
|
SU1777256A1 |
| Автооператор для автоматической линии термообработки | 1976 |
|
SU748113A1 |
| Устройство для ориентации ферромагнитных изделий | 1983 |
|
SU1189649A1 |
| Роторный станок для доводки поршневых колец | 1985 |
|
SU1288036A1 |
| НИТКОШВЕЙНАЯ МАШИНА И ЕЕ ШВЕЙНЫЙ МЕХАНИЗМ, МЕХАНИЗМ ПЕРЕНОСА НИТИ, МЕХАНИЗМ ПРОКОЛА И НИТЕПРОВОДЯЩИЙ МЕХАНИЗМ | 2004 |
|
RU2283774C2 |
| Станок для доводки наружных цилиндрических поверхностей деталей | 1981 |
|
SU956253A1 |
| Станки для доводки наружных поверхностей вращения | 1988 |
|
SU1511089A1 |
| Станок для шлифования плоских поверхностей деталей | 1988 |
|
SU1602710A1 |
Изобретение относится к электротехнике и может быть использовано как технологическое оборудование при изготовлении магнитопроводов. Целью изобретения является повышение производительности. Автооператор состоит из механизма подачи и отвода магнитопроводов /М/, связанного с пневмоприводом, подводяш,его 3 и отводящего 4 лотков и стола 7 для установки М на контроль, снабженного механизмом 12 коррекции его положения и мех. 13 фиксации М. Механизм 1 выполнен в виде двух пар рычагов 19, установленных на осях зубчатых колес 10 и несущих на свободном конце поворотный стол 20 с механизмом 2 захвата, двух зубчатых двусторонних реек 9, жестко связанных со штоком пневмопривода и находящихся в зацеплении с зубчатыми колесами 10. Механизм 12 кинематически связан со штоком пневмопривода. Автооператор работает следующим образом. М с подводящего 3 лотка перемещается в позицию захвата и одновременно рычаги 19 приводятся в движение рейками 9. Каждый механизм 2 захватывает половину М, при этом одна пара рычагов 19 с позиции захвата, а другая - со стола 7. Затем рейка 9 меняет направление и одна пара рычагов 19 разворачивается к столу 7, а другая - к отводящему лотку 4. На столе 7 происходит стыковка половинок М с совпадением кромок его ветвей, что достигается механизмом 13 фиксации. Мех. 12 коррекции положения стола обеспечивает коррекцию оси измерительной катушки для ввода в нее половинок магнитопроводов. 3 з.п. ф-лы, 9 ил. се (Л ьо ел со 00 iU 
20
777777777
Вид Б
3/ 28
25 23 0
Вид В
М
Фиг.В
J 42
ФигЛ
22
Ось аВтооператаро
/О 26
20
| Автооператор | 1979 |
|
SU772809A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Волчкевич Л | |||
| Т., Усов Б | |||
| А | |||
| Автооператоры | |||
| М.: Машиностроение, 1974, с | |||
| Аппарат, предназначенный для летания | 0 |
|
SU76A1 |
