1
Описываемый прибор предназначен для использования в качестве индикатора в системе траекторного унравления.
Известны директорные приборы, содержащие модуляторы, следящие системы, выходы которых связаны через узел управления с командным индексом, и усилитель, соединенный с блепкерным табло.
Известные приборы недостаточно просты.
Описываемый прибор отличается тем, что он содержит сумматоры и инверторы, входы первого сумматора подключены к выходам нервого и третьего модуляторов, входы второго сумматора соединены соответственно со в.ходом второго модулятора и выходом первого инвертора, подключенного к четвертому модулятору, вход третьего сумматора через второй инвертор соединен с выходом второго модулятора; выходы нервого и второго сумматоров подключены ко входам соответствующих следящих систем, датчики обратной связи которых соединены со входами третьего сумматора.
Такое вынолнение прибора упрощает его.
Кроме того, прибор отличается тем, что узел управления вынолнен в виде двух пар зубчатых секторов, имеющих выступы и расположенных на одной оси.
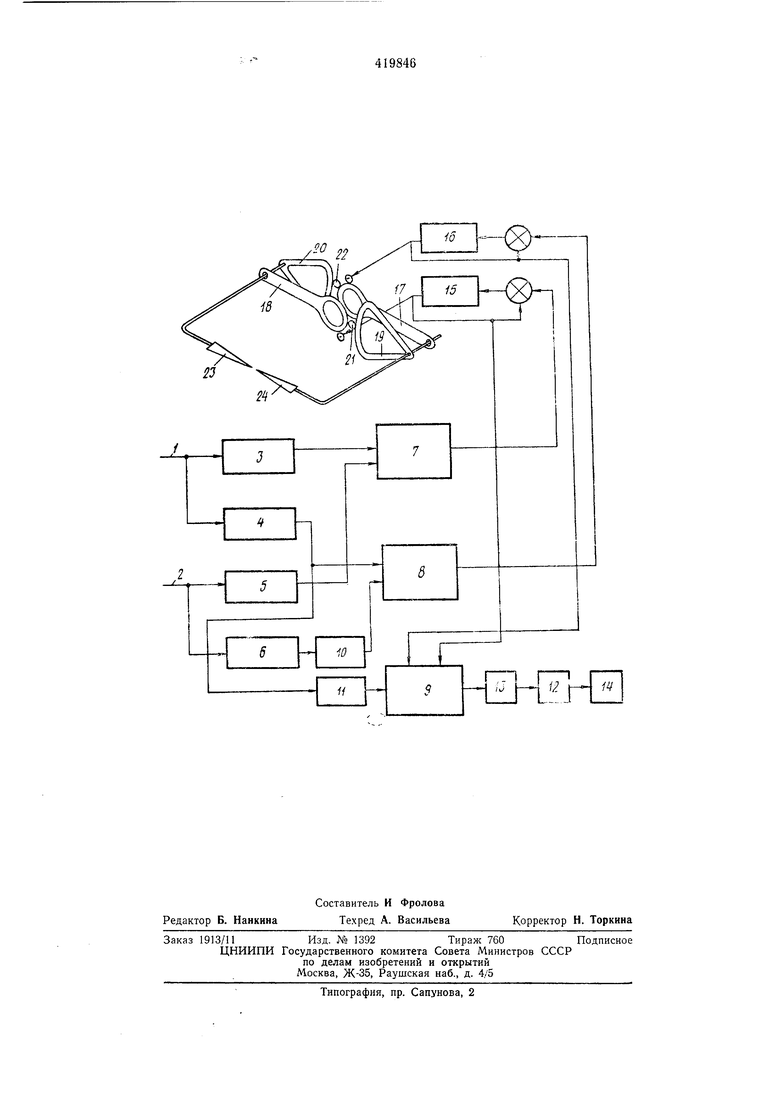
На чертеже изображена функциональная схема прибора, где 1, 2 - входные сигналы.
Прибор состоит из электронной преобразовательной части, включающей модуляторы 3-6, сумматоры 7, 8, 9, инверторы 10, 11, 12, усилитель 13 и бленкер 14; двух электромехапических следящих систем 15 и 16 с индукционными датчиками в цени обратной связи и механической индикаторной связи, состоящей из зубчатых секторов 17-20, шестерен 21,22 и индексов 23, 24, прелЧставляющей узел
управлепия.
Устройство работает следующим образом. Сигналы команд по крену 6z и тангажу бн (позиции 1 и 2, соответственно) в виде постоянного тока поступают на модуляторы 3-
6, преобразуются в сигналы переменного тока и суммируются на сумматоры 7 и 8, нричем на сумматор 8 снгнал бн поступает через инвертор 10, т. е. обратного знака. На выходе сумматора 7 получается сигнал, пронорциональный сумме сигналов , а па выходе сумматора 8 - сигнал, пропорциональный разности сигналов 6z-бн- Полученные сигналы суммы н разности командных сигналов обрабатываются посредством следяпиьх систем 15 и 16. Выходы следящих систем связаны с зубчатыми секторами 17 и 18.
Рассмотрим случай, когда сигнал 1 отсутствует, т. е. бн 0. В этом случае обе следящие системы отрабатывают одинаковые по
величине, но разных знаков сигналы бн, выходпые валы следящих систем 15 н 16 поворачиваются на одинаковый угол, но в разные стороны; наприл;ер, вал системы 15 - по часовой стрелке, а вал системы 16 - против часовой стрелки. При этом обе ноловинкн индекса 23 и 24 за счет поворота секторов 17 и 18 опускаю1сл, а laK как при этом происходит обка.ка секторов 19 и 20 вокруг шестерен 21 и 22,; то половинки индекса поворачиваются также вокруг своей оси в сторону, противоположную вpaIдeк uo.
Передаючное число подбирается таким образом, что результирующее перемещение ипдекса выглядит как поступательное перемеьцение впиз.
В случае, когда сигнал 2 отсутствует, т. е. 5н 0, сигнал 6z покупает па обе системы 15 и 16 одинакового знака. Выходные валы обеих следящих систем поворачиваются в одну сторону, например, по часовой стрелке, секторы 17 и 18 также в одну сторону, в данном случае -- против часовой стрелки и весь ипдекс поворачивается против часовой стрелки на угол, нроиорциональный величине сигнаГ-1 А
Jid UZ.
При наличии обоих сигналов иидекс соверщает сложное движение, поворачиваясь вокруг своего центра и перемещаясь поступательпо.
Контроль исправности прибора осуществляется следующий образом.
При исправной работе прибора суммарный сигнал с датчиков обратной связи следящих систем 15 и 16 поступает на суМлМатор 9 и компенсируется сигпалом 6z, поданным па сумматор 9 через инвертор 11. Результирующий сигнал на выходе сумматора 9 равен нулю. При этом на выходе инвертора 12 есть
сигнал, блепкер 14 обтекается током и пружина бленкера удерживает флажок неисправности в закрытом положении.
При появлении любого вида неисправности: отказ сервоусилителя, двигателя, кинематики, датчика обратной связи любой из следящих систем или любого элемента электронного преобразовательного устройства, нарущается равенство сигналов па входе сумматора 9, на выходе сумматора появляется сигнал и усиливается усилителем 13, на выходе инверюра 12 сигнал исчезает, бленкер 14 обесточивается и под действием пружины бленкера ноявляется флажок неисправности.
Предмет изобретения
1. Директорный прибор, содержащий модуляторы, следящие системы, выходы которых связаны через узел унравления с командным
индексом, и усилитель, соединенный с бленкерпым табло, отличающийся тем, что, с целью упрощения нрибора, он содержит сумматоры и инверторы, входы первого сумматора подключены к выходам первого и третьего
модуляторов, входы второго сумматора соединены соответственно со входом второго модулятора и выходом первого инвертора, подключенного к четвертому модулятору, вход третьего сумматора через второй инвертор
соединен с выходом второго модулятора, выходы первого и второго сумматоров подключены ко входам соответствующих следящих систем, датчики обратной связи которых соединены со входами третьего сумматора.
2. Прибор но п. 1, отличающийся тем, что узел унравления вынолнен в виде двух нар зубчатых секторов, имеющих выступы и расположенных па одной оси.
| название | год | авторы | номер документа |
|---|---|---|---|
| Директорный прибор | 1975 |
|
SU600522A1 |
| Директорный прибор | 1979 |
|
SU802926A1 |
| Следящая система | 1978 |
|
SU744432A1 |
| СЛЕДЯЩАЯ СИСТЕМА С КОНТРОЛЕМ ИСПРАВНОСТИ | 1973 |
|
SU383008A1 |
| Следящая система | 1976 |
|
SU660018A1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ИНФОРМАЦИИ | 1972 |
|
SU435545A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1971 |
|
SU304551A1 |
| ДИРЕКТОРНАЯ СИСТЕМА | 1970 |
|
SU276450A1 |
| Следящая система | 1982 |
|
SU1118961A1 |
| И. Г. Моисеев,И. И. Погожее, Ю. Н. Семенов и Н. М. Якименко | 1965 |
|
SU174689A1 |