1
Известен способ автоматического контроля и регулирования профиля полосы на четырехвалковом прокатном стане путем управления средствами охлаждения валков по сигналам измерителей натяжения по ширине полосы.
Недостаток известного способа состоит в том, что уровень сравнения, вырабатываемый как среднеарифметическое всех измеренных сигналов по ширине, дает большие погрешности в измерении обшей неплоскостности полосы.
Предложенный способ отличается тем, что часть средств охлаждения отключают, измеряют натяжение полосы по ее ширине, логически сравнивают значения натяжения полосы в охлаждаемых и неохлаждаемых зонах и по результатам сравнения производят переключение охлаждаюш,их средств.
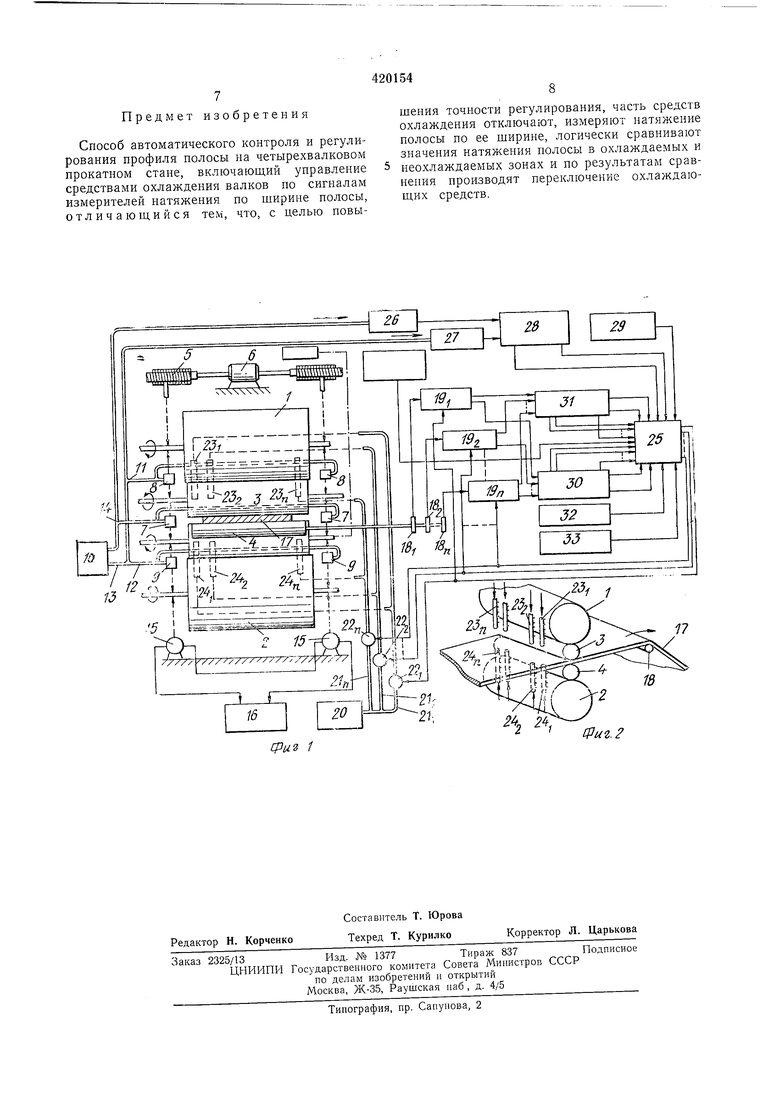
На фиг. 1 представлена блок-схема, реализуюшая описываемый способ управления термической выпуклостью полосового стана; на фиг. 2 - клеть с прокатываемой полосой.
Четырехвалковый стан содержит верхний и нижний опорные валки 1 и 2, шейки которых лежат на обычных подушках. Опорные валки опираются на верхний и нижний рабочие валки 3 и 4, шейки которых также лежат на подушках. Весь указанный узел поддерживается в раме или корпусе нажимными механизмами 5 и опирается на подушки верхнего опорного валка с зубчатой передачей 6 или другим подобным приводом для регулировки давления, прикладываемого к валкам со стороны нажимного механизма.
Гидравлические уравновешивающие домкраты 7 распололсены между подушками верхнего и нижнего рабочих валков, а гидравлические контурные домкраты 8 и 9 - между нодушками рабочих валков и подушками верхнего и нижнего опорных валков. Из бачка 10 гидравлическая рабочая среда подается в верхний и нижний контурные домкраты 8 и 9 через трубопроводы 11 и 12, соединяюшиеся в обший трубопровод 13, а также в уравновешиваюшие домкраты 7 через трубопровод 14 (на чертежах для простоты показан один домкрат па каждой стороне в каждом уровне).
От системы домкратов прикладываются изгибаюшие силы к рабочим валкам. Давление металла на валки при прокатке воспринимается датчиками 15, расположенными между подушками нижнего онорного валка и ралюй стана. Датчики иодают сигналы на считываюшую схему 16, обеспечивающую индикацию давления металла на валки.
Подлежаш,ая прокатке полоса 17 поступает из рулона с соответствующим натяжением или механическим сопротивлением для поддержания заднего натяжения полосы, движущейся к рабочим валкам. Уменьшенная (по толщине) часть полосы снова сматывается в рулон после прохождения через направляющий горизонтальный ролик 18 у выхода из клетн. Этот ролик включает средства для всспринятия напряжений, создаваемых полосой в различных зонах ролика. Напряжение в каждой зоне заBiiCHT от натяжения полосы (расгяжепня в нолосе) в каждой зоне и cooinciCTBenuo характеризуется толщнной и плоскостдюстью полосы в этой зоне.
Сигналы, развиваемые на скользяндих кольцах 18t, 182, ... 18п, представляют собой нанряжения, воспринимаемые в нанравляющем ролнке для зон но ширине полосы нонерек этого ролика. 3in сигналы, предс;авляющне собой то,(1цину и плоское гность полосы, нодаючся на вентильные схемы 19, 192, ... 19л, соС1ав/1яю;дие час1Ь системы регулирования, которая регулирует поток (вытекание) хладоагеита на валки полосового стана.
Охлаждаюп1ее масло из бачка 20 для хладоагента идет по трубснроводам 211, 212, 21п через клананы 22, 222, 22„ к разбрызгиваюнл,им головкам, служапи м для )азбрызгивапия хладоагента на валки no./iocoBoro стана. Разбрызгиваюгцие го.повки 23|, 282, . . . 23,i расположены над нолссоь 17 и подают хладоагент к верхнему онорно.му валку 1 п рабочему валку 13, тогда как разбрызгиваюпию головки 24i, 240, . . . 24„ размещены нод нолосой и разбрызгивают хладоагент на нижний рабочий валок 4 и онорнь 1Й валок 2. Разбрызгивающие головки нптаются хладоагентом ннднвндуалыю от клапанов 22, 222, . . . 22i,. Унраилепие указанными клапанами производится посредством сигпалов, поступающих пз логического устройства управления 25.
Датчики давлепия 26 и 27 восприиимают соОгветственно давление жидкости, подаваемой в уравповещивающие и контурные домкраты. Датчики давления создают сигналы, которые подаются на сравнивающий элемент 28, когда имеет место чрезмерная положительная изгибающая сила, а именно когда давление в уравновешивающих домкратах превышает давлепие в контурных домкратах на величину, больщую заданной. Если же давлеиие в контурных домкратах- превышает давление в балансных (уравновещивающих) домкратах на величину, большую заранее заданной, сравниБающий элемент 28 вырабатывает сигнал, представляющий co6oii чрезмерное отрнцательное изгибающее усилие.
Указанные сигналы ностунают на логическое устройство управления 25, которое вырабатывает сигналы, нодаваемые на клапаны, изменяющие ноток хладоаген1а на выбранные зоны с целью уменьшения чрезмерных изгибающих усилий. В частности было установлено, что целесообразным видом регулировки является воздействие на зоны вне кромок полосы в соответствии с чрезмерным изгнбающ,им усилием. Соответственно в системе устройство-селектор 29 зоны по ширине вырабатывают снгиалы, ноступающие па логическое
устройство управления 25 (или контрольное логическое устройство), которое указывает для полосы конкретной ширины зоны, находящиеся внутри кромок полосы, и зоны, находяншеся вне кромок полосы. Устройство управления 25 управляет потоком хладоагента к внешним зонаг. в соответствии с чрезмерны.ми изгибающими силами, проявляемыми валковыми домкратами.
Поток хладоагента к зонам, лежащим внутри кромок полосы, устанавливается в соответствии с натяжением полосы, определяемым в горизонтальном направляющем ролике для этих зон. Сигналы вентильных схем 19, 192, . . . 19,1, соответствующие зонам, к которым подается хладоагент (клапаны открыты), поступают к дискриминатору «включенных зон 30. Подобным образом управляются сигнальные вентильные схемы для того, чтобы все вентили, соответствующие зонам, в которые не нодается хладоагент (клананы закрыты), нропускали сигналы с направляющего ролика, характеризуюп;ие натяжение на дискриминатор «выключенных зон 31.
Дискриминатор «включенных зон 30 развивает на выходе два сигиала, представляющие собой соответствепно сигнал максимального потепциала, подаваемый па дискриминатор, и сигнал м1П1имального нотенциала, также нодаваемый на дискриминатор. Другими словами, дискриминатор «включенных зон вырабатывает два снгнала, представляющие собой максимальное н ми11имальное натяження в нолосе 17, обнаруженные для всех «включенных зон, в которые подается хладоагепт. Подобным образом дискримииатор «выключенных зон 31 вырабатывает сигналы, представляющие собой соответственно максимальное и минимальное натяжения в полосе 17, обнаруженные направляющим роликом для тех зон, в которые не подается хладоагент. Сигналы поступают на логическое устройство управления 25.
Дискриминатор «включенпых зон также создает на выходах сигналы по числу (п) зон контроля, которые заводятся на то же контрольное (унравляющее) логическое устройство. Дискриминатор «выключенных зон также вырабатывает сигналы по числу зон KOiiTpoля, которые подаются на то же управляюндее логическое устройство. Сигнал каждой зоны обеснечивает связь через управляющее логическое устройство с управляющими клапанами подачи хладоагепта. Управляющее логическое устройство принимает сигнал скорости от измерителя 32, представляющий собой скорость полосы через валки стана, которая имеет значение большее, чем заранее заданная скорость (5 футов в минуту). Измеритель 32 может генерировать сигнал отметки времени, показываюн;ий, что минимальное время задержки с момента начала операции прокатки прошло. Этот измеритель подает сигнал, фактически характеризуюн й операцию прокатки. Блок 33 определяет работу ус1ройства в ручном или автоматичес1 ом режиме.
Логическая схема работает следующим образом.
Общая неплоскостность превышает заранее заданное значение Р. Скорость полосы превыщает 5 футов в минуту (или минимальное время задержки с начала операции по прокатке истекло).
Условие I. Наибольшее натяжение полосы в охлаждаемых «включенных зонах больше, чем наименьшее натяжение полосы охладительных «выключенных зон, или разность между пределами (областями) ненлоскостности «включенных и «выключенных зон превышает X. Зона, в которой должно быть произведено изменение, лежит внутри кромок нолосы. При этом изменение хладоагента из положения «выключен на положение «включен производится, если предел неплоскостиости в зонах с «выключенным хладоагентом превышает предел неплоскостности в зонах с «включенным хладоагентом; изменение хладоагента из положения «включен на положение «выключен, при котором зона с «включенным хладоагентом испытывает наибольшее натяжение полосы, осуществляется, если предел неплоскостности в зонах с «включенным хладоагентом превышает предел неплоскостпости в зонах с «выключенным хладоагентом.
Условие П. Чрезмерная отрицательная изгибающая сила, проявляемая валковыми домкратами, которыми управляют в соответствнн с нагрузкой прокатки (т. е. в соответствии с давлением металла на валки при прокатке). При этом выключают хладоагент в выбранных зонах, лежащих вне кромок полосы.
Условие П1. Чрезмерная положительная изгибающая сила, проявляемая валковыми домкратами, которые управляются в соответствии с нагрузкой прокатки. При этом включают хладоагент в выбранных зонах, лежащих вне кромок полосы.
Указанная система работы сконструирована с учетом того критерия, что натяжения нолосы во всех зонах с «выключенны.м хладоагентом будут больше, чем все натяжения полосы в зонах с «включенным хладоагентом. Сигналы о натяжении полосы, поступающие от направляющего ролика, представляют собой две группы сигналов, а именно первую группу сигналов от всех «выключенных зон, которые имеют большую величину, чем все сигналы от «включенных зон. Если какая-либо часть валка стана имеет больший диаметр, чем ей следует иметь, то такое состояние приводит к. меньшему размеру толщины полосы в э7ом сечении, т. е. к большей длине полосы, что в свою очередь приводи г к меньшему натяжению в соответствующей зоне направляющего горизонтального ролика и к меньщему сигналу, снимаемому с зоны направляющего ролика. Коррекция заключается в подаче больщего количества охлаждающей жидкости (хладоагента) :; згу зону для уменьшения дпа.метра валка.
Производи.мые изменения достигаются по отношению к экстремому в «включенных и
«выключенных зонах. Зона «выключено, проявляющая наименьщее натяжение полосы (дающая минимальный сигнал), будет менять свое состояние на зону «включено, либо зона «включено, дающая сигнал, свидетельствующий о наибольшем натяжении нолосы, будет переключена на зону «выключено тогда, когда такое измененне состояния зоны необходимо. Из.менення считаются необходимыми- (среди других критериев) в том случае, когда сигнал о максимальном натяжении полосы, поступающий от «включенных зон, больще, чем сигнал о минимальном натяжении полосы, поступающий от «выключенных зон. Управление потоками охлаждающей жидкости (хладоагента) на разные зоны может производиться Б зависимости от различных рабочих условий (состояний). Если все указанные критерии соблюдены, то поток хладоагента включается в той зоие, которая перед этим была «выключена и которая имеет наименьщее натяжение нолосы, обнаруженное горизонтальным направляющим роликом при условии, что прелТ,ел ненлоскостности в зонах с «выключенным хладоагептом превышает предел неплоскостности в зонах с «включенным хладоагентом. Если все критерии соблюдены н нределы ненлоскостности в зонах с «включенным хладоагентом превышают пределы неплоскостности в зонах с «выключенным
хладоагентом, производится изменение состояния, т. е. выключение потока хладоагента в зоне, в которую до этого подавался хладоагент при условии, если эта зона является зоной с паибольщим натяжением полосы из всех
зон с «включенным охлаждением.
Чрезмерные изгибающие силы на валковых домкратах (либо ноложительные, либо отрицательные) будут приводить к изменению потока охлаждающей среды. Чрезмерные изгибающие силы (усилия) возникают из-за давлений, прикладываемых к до.мкрата.м 7, 8 и 9. Если сила, проявляемая балапсными (уравновещивающими) домкратами 7, превышает силы, имеющие место в контурных домкратах 8 и 9, то в результате возникает чрезмерная положительная изгибающая сила. В таком случае хладоагент должен быть включен в выбранные зоны, лежащие вне кромки полосы.
Если усилие, проявляемое контурными домкратами 8 и 9, чрез-мерно превосходит усилие, проявляемое балансными домкратами 7, что приводит к возникновению чрезмерной отрицательной изгибающей силы, хладоагент должен быть выключен в выбранных зонах, лежащих вне кромки полосы. Такое управление потоком хладоагеита к внешним зонам имеет место, когда валковые домкраты прикладывают силы в соответствии с давлением металла
на валки при прокатке. 7 Предмет изобретения Способ автоматического контроля и регулирования профиля полосы на четырехвалковом прокатном стане, включающий управление средствами охлаждения валков по сигналам измерителей натяжения по ширине полосы, отличающийся тем, что, с целью повышения точности регулирования, часть средств охлаждения отключают, измеряют натяжение полосы по ее ширине, логически сравнивают значения натяжения полосы в охлаждаемых и неохлаждаемых зонах и по результатам сравнения производят переключение охлаждающих средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического регули-РОВАНия плОСКОСТНОСТи пРОКАТыВАЕМыХпОлОС | 1978 |
|
SU827204A1 |
| Устройство для регулирования прогиба прокатного валка многовалкового стана | 1987 |
|
SU1447447A1 |
| Валковый комплект двадцативалкового стана | 1988 |
|
SU1595598A1 |
| Комплект валков 20-валкового прокатного стана | 1987 |
|
SU1443997A1 |
| Устройство автоматического регулирования профиля прокатываемой полосы | 1974 |
|
SU880530A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПЛОСКОСТНОСТИ ПОЛОС | 2000 |
|
RU2189875C2 |
| СПОСОБ НЕПРЕРЫВНОЙ ПРОКАТКИ МЕТАЛЛИЧЕСКОЙ ПОЛОСЫ (ВАРИАНТЫ) | 2005 |
|
RU2281817C1 |
| ПРОКАТНАЯ КЛЕТЬ "КВАРТО" | 2018 |
|
RU2699489C1 |
| Способ прокатки полосового металла в многоклетевом стане | 1985 |
|
SU1297956A1 |
| Валковый комплект многовалкового стана | 1988 |
|
SU1546185A1 |
cpui 1
