1
Изобретение относится к транспортной технике, а именно к грузоподъемным и опрокидывающим устройствам в металлургических цехах.
Известно подъемное устройство по авт. св. 260857 - многозвенный рычажный механизм типа нюрнбергских ножниц, снабженный двумя парами одноплечих рычагов, шарнирио соединенных между собой, и цапфами подвесных рычагов, несущих короб, поворачивающийся относительно их цапф, а нижние звенья подъемного многозвенного рычажного механизма соединены между собой общим вало.м, взаимодействующим с кривошипно-шатунным механизмом при помощи пары щатунов с электромеханическим приводом.
Однако в таком устройстве рычажный механизм не имеет достаточной устойчивости и потребляет завышенную мощность, - что приводит к увеличению габаритов привода.
Цель изобретения - увеличение устойчивости рычажных механизмов, снижение потребной мощности при кантовании большегрузных коробов и сокращение габаритов.
Для этого подвесные рычаги подъемника жестко соединены между собой траверсой, а в качестве усилителя привода использована гидросистема с гидроаккумулятором, сообщенным с СИЛОВЫМИ цилиндрами.
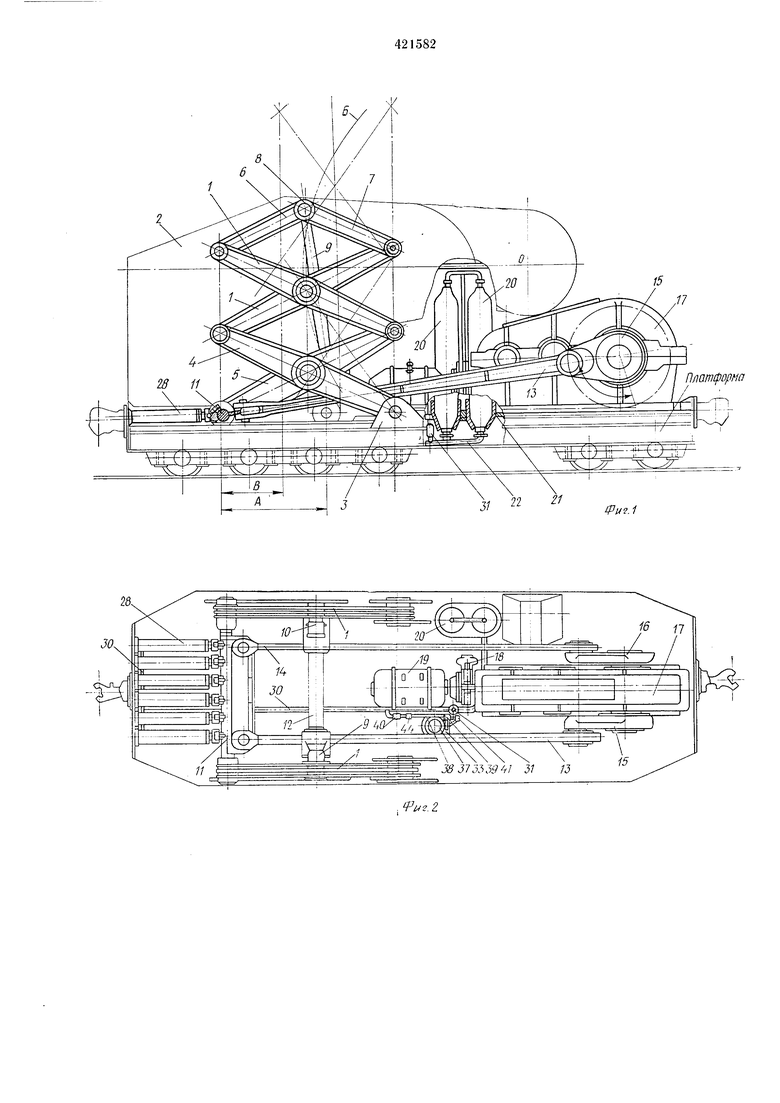
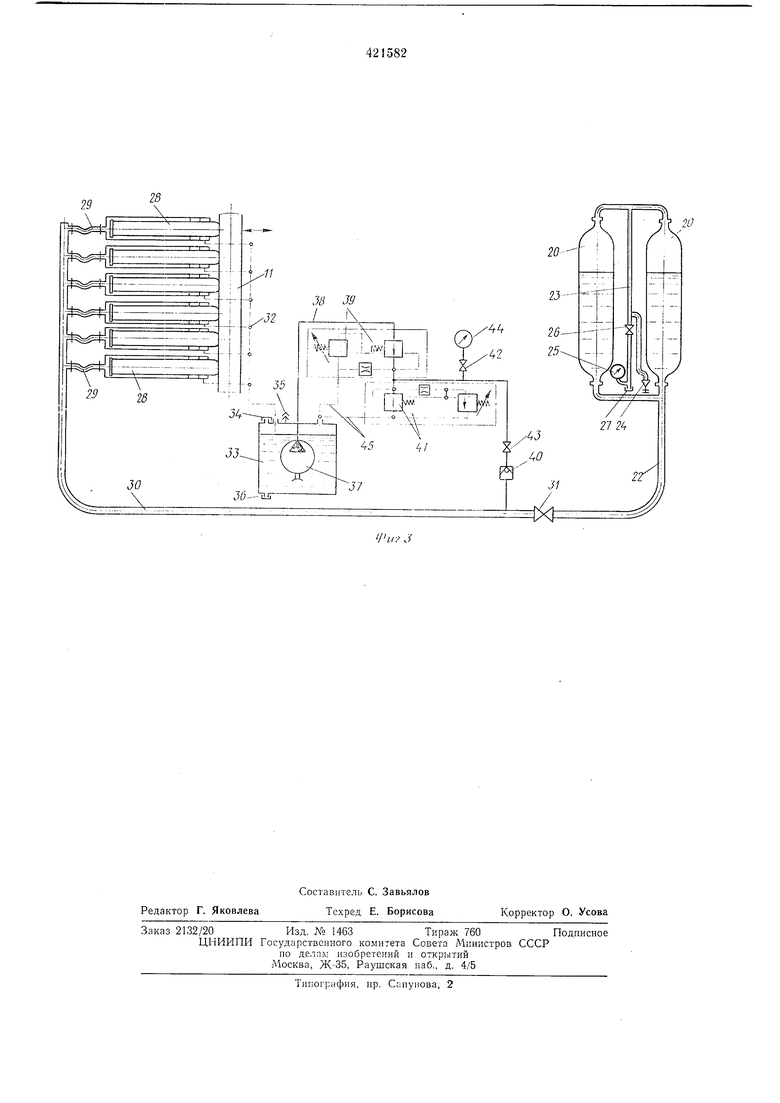
На фиг. 1 изображен предлагаемый подъемник, общи вид; на фиг. 2 - то же, вид сверху; на фиг. 3 изображена гидросхема.
Подъемник имеет два многозвенных рычажпых механизма 1, установленных по обеим сторонам короба 2 на неподвижных опорах 3. Каждый многозвенный механизм состоит из системы наружных рычагов 4 и внутренних рычагов 5, шарнирно соединенных между собой. На верхних щарпирах рычагов 4 и 5 установлены наружные одноплечие рычаги 6 и внутренние одноплечие рычаги 7, соединенные между собой шарнирами 8, на которых подвешены рычаги 9 и 10.
Для обеспечения устойчивости многозвенных рычажных механизмов при работе нижние подвижные рычаги 5 соединены между собой общим валом 11 с опорными катками, а рычаги 9 и 10 жестко соединены между собой
общей траверсой 12, па которую свободно опирается короб. К валу 11 шарпирно прикреплены два шатуна 13 и 14, щарнирно соединенные с кривошипами 15 и 16, которые в свою очередь закреплены па валу редуктора 17 электромехаппческого привода, включающего электромагнитный тормоз 18 п электродвигатель 19.
С целью уменьшения нагрузок на кривошипно-шатунный механизм, уменьшения нотребной мощности и габаритов прпвода, подъемник снабжен гидросистемой, содержащей гидроаккумулятор, состоящий из двух (или нескольких) баллоиов 20, вертикальио закрепленных в гнездах 21 иа нлатформе и соединенных между собой нижним коллектором 22 и верхним коллектором 23, сообщающимся с иредохранительным клананом 24, манометром 25 и имеющим занорный вентиль 26 н нробку 27. Гидроаккумулятор сообщается с силовыми цилиндрами 28 посредством гибких рукавов 29, коллектора 30 н запорного (аварийного) вентиля 31. Манжетное уплотнение силовых цилиндров 28 через дренажную систему труб 32 сообщается с баком 33 устройства дозарядки гидроаккумулятора, которое состоит из бака 33 с заливной горловииой, пробкой 34, сануном 35, сливной горловииой и пробкой 36; насоса 37 с электродвигателем, смонтированного в баке; нагнетательного коллектора 38, сообщающ,его насос 37 с коллектором 30 через редукционный кланан 39, обратный кланан 40, имеющий неренускной клапан 41, запорные вентили 42 и 43 -и манометр 44; переливного коллектора 45, обеспечивающего слив гидрожидкости от клапанов 39 и 41 в бак 33.
При первом полуобороте кривошипов 15 и -16 путем воздействия шатунов 13 и 14 на вал 11 рычаги 4 н 5 многозвенных механизмов иеремещаются в крайнее переднее ноложение, указанное на фиг. 1 интервалом (ход) А. При этом траверса 12 вместе с иижними концами подвесных рычагов 9 и 10 соверщает движение по дуге Б с центром вращения в точке О, одновременно разворачивая короб 2 более, чем на 60°.
В начале хода А мпогозвеппых механизмов 1 в интервале В на вал 11 воздействуют силовые цилиндры 28, уменьщая нагрузку па кривощипно-щатунный механизм груженого короба 2. Дальнейщая кантовка короба 2
осуществляется кривошинно-щатунным механизмом и многозвенными механизмами без участия силовых цилиндров 28.
Во втором полуобороте кривощинов 15 и 16 многозвенные механизмы 1 с рычагами 9, 10, траверсой 12 и коробом 2 возвращаются в исходное ноложение, после чего электропривод отключается конечным выключателем, включается при этом электромагнитный тормоз 18,
останавливающий подъемный механизм. В конце хода А многозвенных механизмов 1 в интервале В усилие щатунов 13 и 14, а также вес миогозвенных механизмов 1, подвесных рычагов 9, 10 траверсы 12 и короба 2 передаются через вал 11 на штокн силовых цилиндров 28. Штоки перемещаются в исходное положение, вытесняя из цилиндров гидрожидкость в гидроаккумулятор. Происходит зарядка носледнего.
Возврат утечек гидрожидкости в аккумулятор осуществляется устройством дозарядки носледнего при работе механизма, т. е. носле интервала В хода механизма нри нервом полуобороте кривошипов до интервала В хода
механизма при второ.м полуобороте кривошипов - в момент минимального давления в гидроаккумуляторе.
Предмет изобретения
1. Иодье.мннк но авт. св. 260857, отличающийся тем, что, с целью увеличения устойчивости многозвенных рычажных механизмов, подвесные рычаги жестко соединены между собой траверсой.
2. Подъемник по н. 1, отличающийся тем, что, с целью уменьшения потребной мощности и сокращения габаритов, в качестве уснлителя привода использовапа гидросистема с гидроаккумулятором, сообщенным с силовыми цилнидрами. 22 2f Пмтформа
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающее транспортное средство | 1977 |
|
SU686930A1 |
| Ножницы для резки металла | 1980 |
|
SU912401A1 |
| ГИДРАВЛИЧЕСКИЙ МОЛОТ ДЛЯ ПОГРУЖЕНИЯ СВАЙ | 2007 |
|
RU2347037C2 |
| ШТАМП ДЛЯ ИЗГОТОВЛЕНИЯ КОЛЕНЧАТЫХ ВАЛОВ | 1971 |
|
SU295598A1 |
| Промышленный робот | 1983 |
|
SU1155334A1 |
| Ножницы для резки металла | 1983 |
|
SU1097455A2 |
| ГИДРАВЛИЧЕСКОЕ РУЛЕВОЕ УПРАВЛЕНИЕ СЛЕДЯИ^РвТИПА | 1964 |
|
SU165987A1 |
| АВТОМАТИЧЕСКАЯ ПОТОЧНАЯ ЛИНИЯ ДЛЯ ФОРМОВАНИЯ И ВУЛКАНИЗАЦИЯ ПОКРЫШЕК | 1969 |
|
SU243817A1 |
| Устройство для открывания бортов формы для изготовления строительных изделий | 1982 |
|
SU1084137A1 |
| Инерционный импульсный вариатор | 1980 |
|
SU945531A1 |