Известная система управления перемещением рабоч.их оргалов деревообрабатывающих станков, ;В:клЮЧающая рукоятку управления с фиксатором, шкалу с фиксирующжмй гаездаМИ, ,, трех1позиционный гидрораспределйтель с автомафической фиксацией среднего .положения и сектор обрат1ной связи, не обеспечивает преселективного управления.
Предложенная система «е «меет этого -недостатка и отличается от известной тем, что шкала с фикси рую-щими тнездами выполнена из двух частей, между «ото ры-ми расположен сектор Обратной связи.
На фиг. 1 изображена описываемая система, абииий вид; на фиг. 2 - :раЗ|рез по А-А на фиг. 1; на фиг. 3 - раз-рез по Б-Б на фиг. 2.
Система 1соде1ржит 1ру;коят,ку управления 1 с фиксатором 2, шкалу 3 с фи-К10И1рующ1ИМ1И г.незда:ми, трехиозиционный ги дрорасп ределитель 4 с автоматической фиксацией среднего положения, гидроцилиндр 5, служащий для привода .рабочего органа, нацример аильной каретки 6, и элементы обратной связи.
Рукоятка управления качается «а оси 7 и вместе с |рычаго1М 8 может свободно пово.рачиваться «а оси 9. Через тягу 10 рукоятка управления соединена со штокам гидро распределителя, под действием щружины которого она занимает среднее положение, а фиксаторо.м входит в гнезда шкалы |И паз се.тора 11 обратной связи. Этот сектор свободно сидит ,на оси 9 и расположен между двумя половийками шкалы, а через элементы обрат.ной связи (тяги 12 :и 13) соединен с .рабоч.и.м органам. Па секто-ре расположены два ynOipa 14 и 15 и фигурный наз 16. Система работает следующ:И,м образом. Для того, чтобы Не.реместаггь ;рабоЧ|ИЙ орга:н
6 .вправо, рукоятку управления 1 поворачивают .на оси 7 вправо, при этом фиксатор 2 выходит из .пазов шкалы 3 и паза 16, с другой стороны через тягу 10 неремещается шток гидрораспредел.ителя 4. Затем рукоятку упдавления вместе с рычаго.м 8 поворачивают вправо па оси 9 .и устанавливают фиксатором 2 в соответствующее гнездо шкалы 3. При этОМ фиксато1р торцом 17 опирается на поверхность 18 сектора И и все время к лему
-поджимается пружиной гидрораспределителя
4. Таким образом подготавливается путь для
доступа масла под но.ршень гидроцил-индра 5.
При поступлешии разрешающего сигнала
масло под давлением начинает .поступать под
поршень и перемещает шток и рабочий орган .впра.во. При этом через тягу 12 поворачивается сектор 11. Паз 16, находящийся на этом секторе, приближается к фиксатору 2 рукоятки управления.
Как только широкий участок паза поравняется с фиксатором, последний проваливается под действием пружины гидрораспределителя 4 и скорость перемещения рабочего органа замедляется. Как только фиксатор поравняется с узкой частью паза, он проваливается полпостыо и окончательно перекрываются отверстия в гидрораспределителе, следовательно, доступ масла к гидроцилиндру прекращается. В результате этого рабочий орган останавливается.
Для того, чтобы пар&местйть рабо-чий Oipra,H влево, .поворачивают рукоятку управления 1 влево и гцикл яювторяется, только iB друго.м на.правлении.
Пред м е т и з о б ip е т е л ,и я
Следящая система управления .перемещением рабочих 0|рганов деревообрабатывающих станков, включ,ающая рукоятку управления с фиксатором, шкалу с фйксирующим,и гнездам.и, гидро1Н)ИЛ,и,нд1р, -црехлозициониый гидрораопределлтель с автОМатической фиксацией среднего .положения и сектор обратной связи, отличающаяся тем, что, с щелью обйспечания преселективБого управления, щ.кала с фиксирующими гнездам|и выполнена из двух частей, между которыми расположен сектор обратной связи с пазом.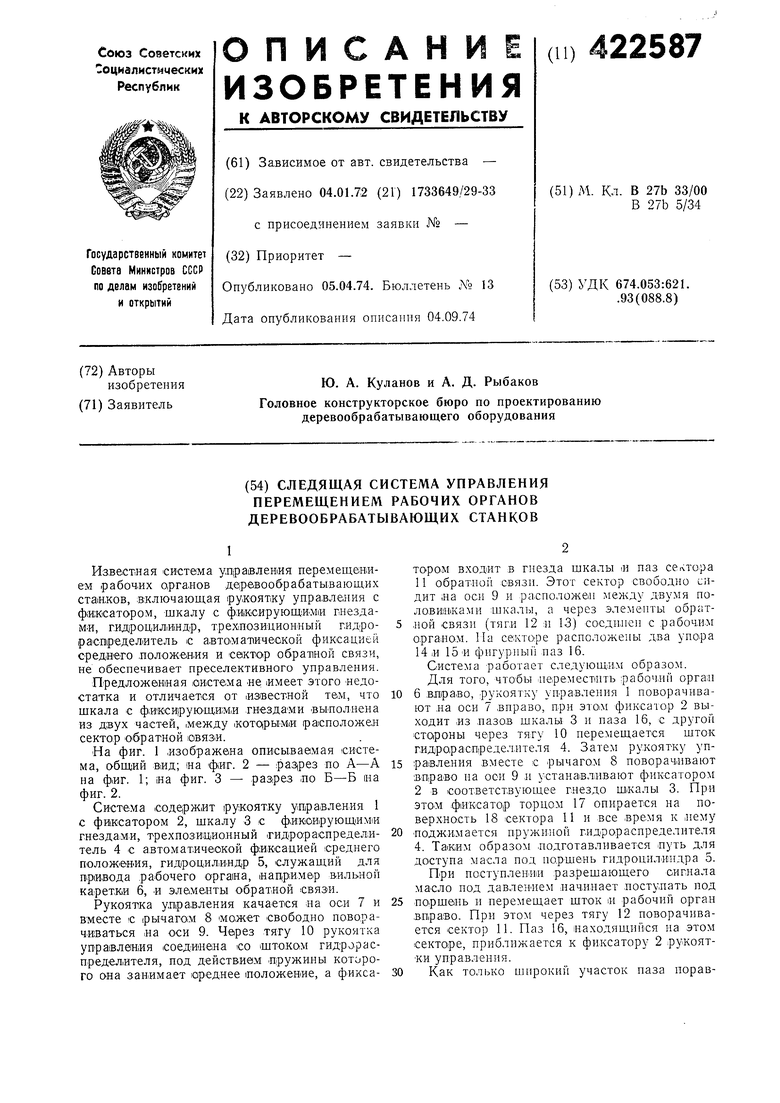

;; j..,iA . ; л Л А / lib/. i/vV -f: иУ-УУу Ш Фиг 2 .:....
