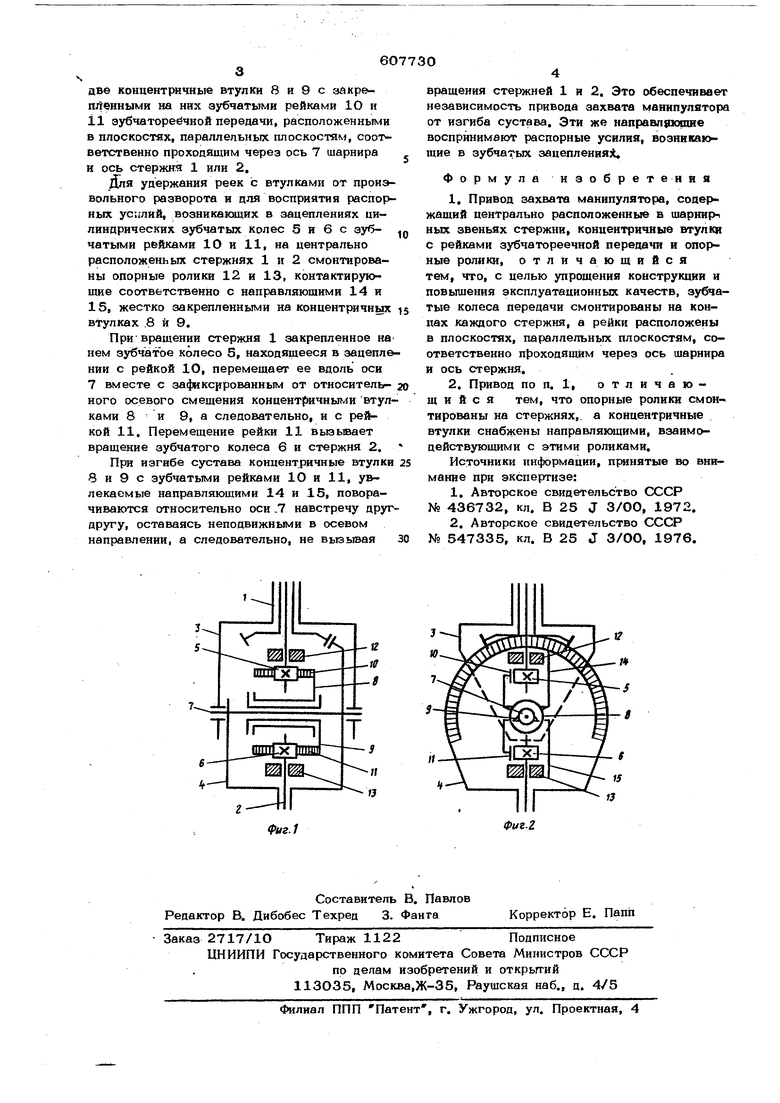
Изобретение относится к машниостроению а именно к копирукмяим манипуляторам. Известен привод захвата манипулятора, осуществляемый через суставы, содержащий установленные в звеньях валы, связанные, в суставб коническими зубчатыми дифференциалами. Привод имеет параллельные кинематические цепи, нагружаемые встречньтми крутящими моментами, благодаря чему обеспечивается его статическая независимость от других-приводов ij . . Однако в этом приводе существует кинематическая, взаимосвязь с приводами других движений. Наиболее близким решением к предлагаем му изобретению является привод захвата манипулятора, содержащий центрально распо ложенные в шарнирных звеньях стержни, концентричные втулки с рейками зубчатореечной передачи и опорные ролики 2J, Известный привод захвата манипулятора сложен по конструкции и имеет низкие эксплуатационные качества иэ-за промежуточных зубчатых цилиндрических колес. Целью изобретения является упрощение конструкций и повышение эксплуатационных качеств манипулятора. Для этого в предлагаемом приводе зубчатые колеса передачи смонтированы ра концах каждого стержня, а рейки расположены в плоскостях, пара1лельных плоскостям, соответственно проходящим через ось шарнира и ось стержня, а также тем, что опорные ролики смонтированы на стержнях, а концентричные втулки снабжены направляющими, взаимодействующими с этими роликами. На фиг. 1 дана схема описываемого привода; на фиг. 2 - то же, разрез по суставу. Привод захвата манипулятора состоит из центрально расположенных стержней 1 и 2, установленных соответственно в ко| пусах смежных шарнирных звеньев 3 и 4, на концах которых жестко закреплены цилиндрические зубчатые колеса 5 и 6. Корпуса соседних звеньев 3 и 4 шарнирно соединены осью 7, на которой с.монтированы две концентричные втулки 8 и 9 с айкрепяенными на них зубчатыми рейками 10 и il эубчатореёчной передачи, расположенными в плоскостях, параллельных плоскостям, соответственно проходящим через ось 7 шарнира и ось стержня 1 или 2. Для удержания реек с втулками от произвольного разворота и для восприятия распор ных усилий, возникающих в зацеплениях цилиндрических зубчатых колес 5 я 6 с зубчатыми рейками 10 и 11, на центрально расположенных стержнях 1 и 2 смонтированы опорные ролики 12 и 13, контактирук щие соответственно с направляющими 14 и 15, жестко закрепленными на концентричных втулках .8 и 9. При вращении стержня 1 закрепленное на нем зубчатЪе колесо S, находящееся в зацепле нии с рейкой 10, перемещает ее вдоль оси 7вместе с зафиксррованным от относительного осевого смещения концентричными втул ками 8 и 9, а следовательно, и с редкой 11, Перемещение рейки 11 вызывает вращение зубчатого колеса б и стержня 2, При изгибе сустава концентричные втулки 8и 9 с зубчатыми рейками 10 и 11, у&лекасмые направляющими 14 и 15, поворачиваются относительно оси ,7 навстречу друг другу, оставаясь неподвижными в осевом направлении, а следовательно, не вызывая вращения стержней 1 и 2. Это обеспечивает независимость привода захвата манипулятора от изгиба сустава. Эти же направляющие воспринимают распорные усилия, возннкак щие в зубчатых зацеплеиияЯ, Формула изобрет ей н я 1.Привод захвата манипулятора, сопе| жащий центрально расположенные в uiapmtp-i ных звеньях стержни концентричные втулки с рейками зубчатореечной передачи и опорные ролики, отличающийся тем, что, с целью упрощения конструкции и повышения эксплуатационных качеств, зубчатые колеса передачи смонтированы на концах каждого стержня, а рейки расположены в плоскостях, параллельных плоскостям, соответственно п{)оходящИм через ось шарнира и ось стержня. 2.Привод по п. 1, отличающийся тем, что опорные ролики смонтированы на стержнях,, а концентричные втулки снабжены направлякицими, взаимодействующими с этими роликами. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР № 436732, кл. В 25 J 3/00, 1972. 2.Авторское свидетельство СССР № 547335, кл. В 25 J 3/00, 1976.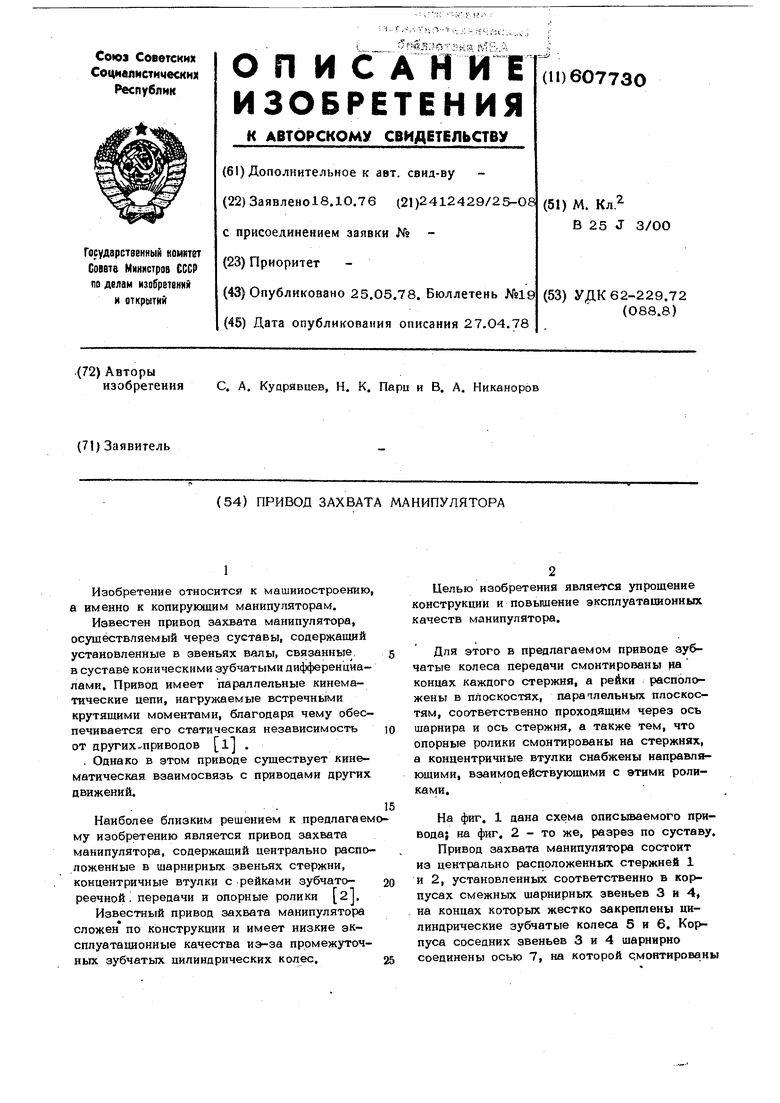
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод захвата манипулятора | 1973 |
|
SU547335A1 |
| Привод захвата манипулятора | 1978 |
|
SU674891A1 |
| Привод схвата манипулятора | 1977 |
|
SU672013A1 |
| Привод захвата манипулятора | 1975 |
|
SU549333A1 |
| Привод захвата манипулятора | 1979 |
|
SU874333A2 |
| Привод захвата манипулятора | 1975 |
|
SU521128A1 |
| Привод захвата манипулятора | 1978 |
|
SU688328A1 |
| Манипулятор | 1985 |
|
SU1265040A1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| Манипулятор модульного типа | 1990 |
|
SU1775289A1 |
13
