со
05
ее
СП
Изобретение относится к машиностроению и может быть использовано для автоматизации различных технологических процессов.
Цель изобретения - расширение тех- нологических возможностей за счет увеличения зоны обслуживания.
На фиг. 1 изображен транспортно-ориен- тируюший манипулятор; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 - разрез Г-Г на фиг. 1. i
ЛАанипулятор содержит раму 1 с закреп- ;1енным на ней объектом - изделием 2, установленные подвижно с помощью катков 3 обойму 4 и выходное звено 5.
На выходном звене 5 жестко установлен противовес 6, предназначенный для установки объекта с рамой в устойчивое равновесие. Выходное звено имеет зубчатое колесо, образующее зацепление с веду- щим зубчатым колесом 7, связанным с приводом 8. Перемычки 9 жестко прикреплены по периметру к элементам обоймы 4. Шарниры, выполненные в виде втулок 10 и валов 11, соединяют обойму 4 с вилкой 12, выполненной в виде полукольца. На втором конце вилки смонтирован привод 13, вал которого связан с вилкой. Вал 14 привода 15 жестко соединен с вилкой в верхней ее части и образует, таким образом, шарнирное соединение этой вилки с тележкой 16, имеющей возможность перемещения по моно- рельсу 17. На раме выполнены отверстия 18 с датчиками 19. На основании шарнирно установлен рычаг 20 с расположенными на нем конусными штырями 21 (ловителями) и зажимами 22, предназначенными для стыковки и фиксации рамы 1.
Манипулятор работает следуюшим образом.
Перед началом работы объект 2 закрепляется на раме 1. Установкой противове- са 6 добиваются расположения центра масс объекта на пересечении горизонтальных и вертикальной осей поворота выходного звена 5.
Для обеспечения требуемой ориентации объекта включаются приводы 8, 13 и 15, оснащенные тормозными устройствами. При этом привод 8 осуществляет поворот выходного звена посредством зубчатой передачи, шестерня которой кинематически связана с этим приводом. Привод 13 осуществляет поворот обоймы, а привод 15 - поворот вилки.
Для обеспечения точного базирования объекта 2 в процессе выполнения технологической операции рычаг 20 поворачивается и расположенные на нем штыри 21 входят в отверстия 18 рамы 1 и посредством зажимов 22 соединяются с рамой. Сигнал датчиков 19 подается при отсутствии фиксации. По окончании технологической операции производится расстановка, а затем доставка объекта к месту следующей технологической операции путем перемещения тележки 16 по монорельсу 17.
Формула изобретения
. Транспортно-ориентирующий манипулятор, содержащий основание с монорельсом, тележку, установленную на монорельсе, обойму, выполненную в виде кольца, выходное звено, также выполненное в виде кольца и шарнирно установленное внутри обоймы соосно с ней, а также раму, жестко закрепленную на выходном звене, отличающийся тем, что, с целью расширения технологических возможностей за счет увеличения зоны обслуживания, он снабжен вилкой, шарнирно связанной с тележкой и с обоймой, а также тремя привода.ми, один из которых жестко установлен на тележке и кинематически связан с вилкой, а два других жестко установлены на этой вилке и кинематически связаны соответственно с обоймой и выходным звеном, при этом на выходном звене жестко закреплен дополнительно введенный противовес.
2.Манипулятор по п. 1, отличающийся тем, что он снабжен рычагом, шарнирно установленным на основании, а также штырями, жестко смонтированными на этом рычаге, при этом на раме дополнительно выполнены отверстия, взаимодействующие с этими штырями.
3..Манипулятор по п. 1, отличающийся тем, что кинематическая связь соответствующего привода с выходным звеном выполнена в виде конической зубчатой передачи, ведо.мое колесо которой жестко закреплено на этом выходном звене, а ведущее П1арнирно установлено на обойме и кинематически связано с упомянутым приводом.
17
16
qju5.2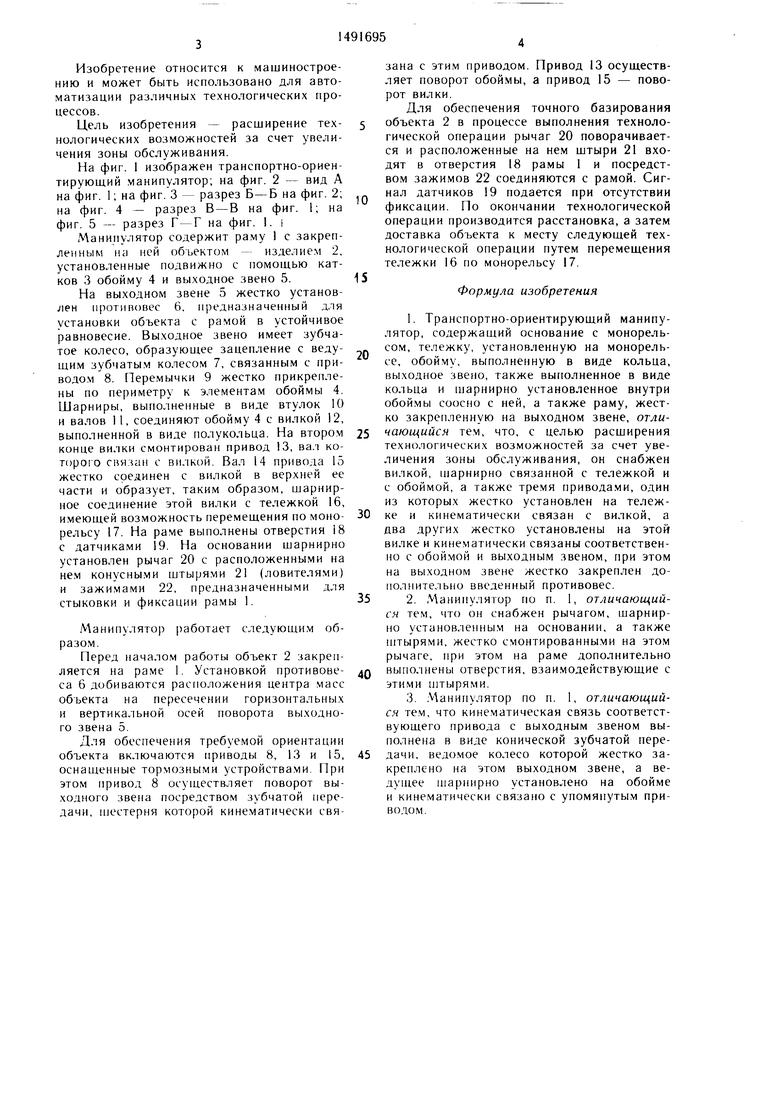
| название | год | авторы | номер документа |
|---|---|---|---|
| МОЕЧНЫЙ КОМПЛЕКС СТЕКЛЯННЫХ КРЫШ ТЕПЛИЦ И.Г.МУХИНА | 1996 |
|
RU2109114C1 |
| КОРНЕКЛУБНЕУБОРОЧНЫЙ АГРЕГАТ И.Г.МУХИНА | 1996 |
|
RU2104630C1 |
| МОЕЧНЫЙ КОМПЛЕКС СТЕКЛЯННЫХ КРЫШ ТЕПЛИЦ | 1999 |
|
RU2202170C2 |
| СПОСОБ УБОРКИ ЗЕРНОВЫХ КУЛЬТУР, ЗЕРНОУБОРОЧНЫЙ АГРЕГАТ И ТОК | 1999 |
|
RU2206199C2 |
| Минитрактор И.Г.Мухина | 1989 |
|
SU1664137A1 |
| УСТАНОВКА ДЛЯ РАЗДЕЛЕНИЯ ТУШ ЖИВОТНЫХ НА ПОЛУТУШИ | 1992 |
|
RU2048108C1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Монорельсовая транспортная система | 1984 |
|
SU1230892A1 |
| ЯМКОДЕЛАТЕЛЬНЫЙ АГРЕГАТ И.Г.МУХИНА | 1998 |
|
RU2144755C1 |
| ПОДВЕСНОЕ МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2561559C1 |

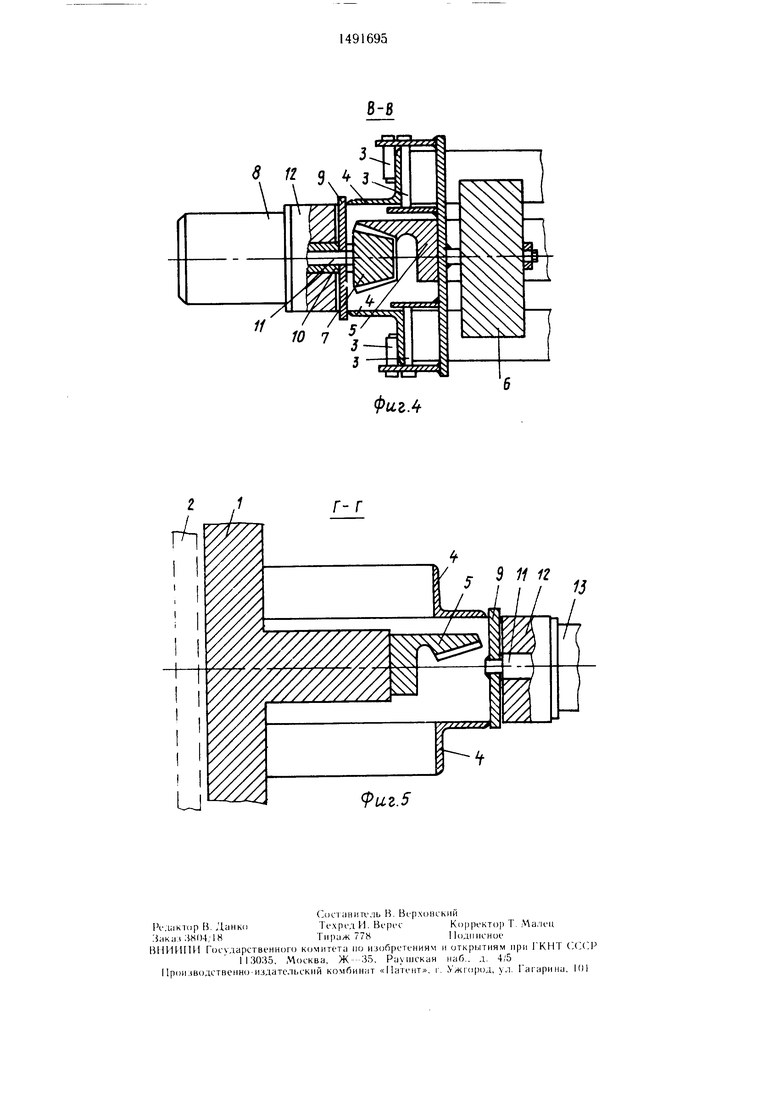
Изобретение относится к машиностроению и может быть использовано для автоматизации различных технологических процессов. Цель изобретения - расширение технологических возможностей за счет увеличения зоны обслуживания. Перед началом работы объект 2 закрепляется на раме 1, жестко смонтированной на выходном звене 5. Установкой противовеса добиваются уравновешивания выходного звена. Для обеспечения требуемой ориентации объекта включаются приводы 8, 13 и 15, при этом привод 8 осуществляет поворот выходного звена посредством зубчатой передачи, ведущее колесо у которой кинематически связано с этим приводом. Привод 13, жестко установленный на вилке 12, осуществляет поворот обоймы 4 благодаря шарнирному соединению ее с вилкой 12. Привод 15, жестко установленный на тележке, осуществляет поворот вилки относительно последней также благодаря соответствующему шарнирному соединению. Для обеспечения смены базирования объекта рычаг 20, шарнирно установленный на основании, поворачивается, и жестко смонтированные на нем штыри 21 входят в отверстия рамы. По окончании технологической операции рычаг 20 отводится и манипулятор перемещается по монорельсу 17 к следующей позиции. 2 з.п. ф-лы, 5 ил.
. З
. Ц 3. . 5
г-г
Фиг.
9иг.5
| Кантователь | 1973 |
|
SU484146A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
