1
Изобретение относится к области манинуляторных устройств и может быть исиользовано ири создании задающего или исиолнительного органов манинулятора.
По основному авт. св. № 278371 известен сустав задающего органа дистанционного конирующего манинулятора, содерл-сащий два звена, на одном из которых смонтирован нрнвод с редуктором.
Недостатками известного сустава являются большие габариты и сложность конструкции.
С целью уменьшения габаритов и унрощения конструкции в предлагаемом суставе манииулятора оба звена установлены на нодшипниках на выходном валу редуктора.
Такое выиолнение сустава дает возможность уменьшить его диаметр за счет уменьшения выходного колеса редуктора, жестко закрепленного на выходном валу редуктора со сравнительно малым диаметром. Размер сустава но его оси также уменьшается, так как этот размер онредсляется длиной выходного вала редуктора, который не связан жестко ни с одним из звеньев сустава, поэтому не требуется дополнительно увеличивать его длину для закрепления на одном из звеньев.
В предлагаемом суставе датчик, измеряющий деформацию упругого элемента, размещен снаружи сустава, между выходным вадо.м редуктора и звеном, па котором закреплен упругий элемент, что упрощает достун к этому датчику и его замену в случае выхода из строя.
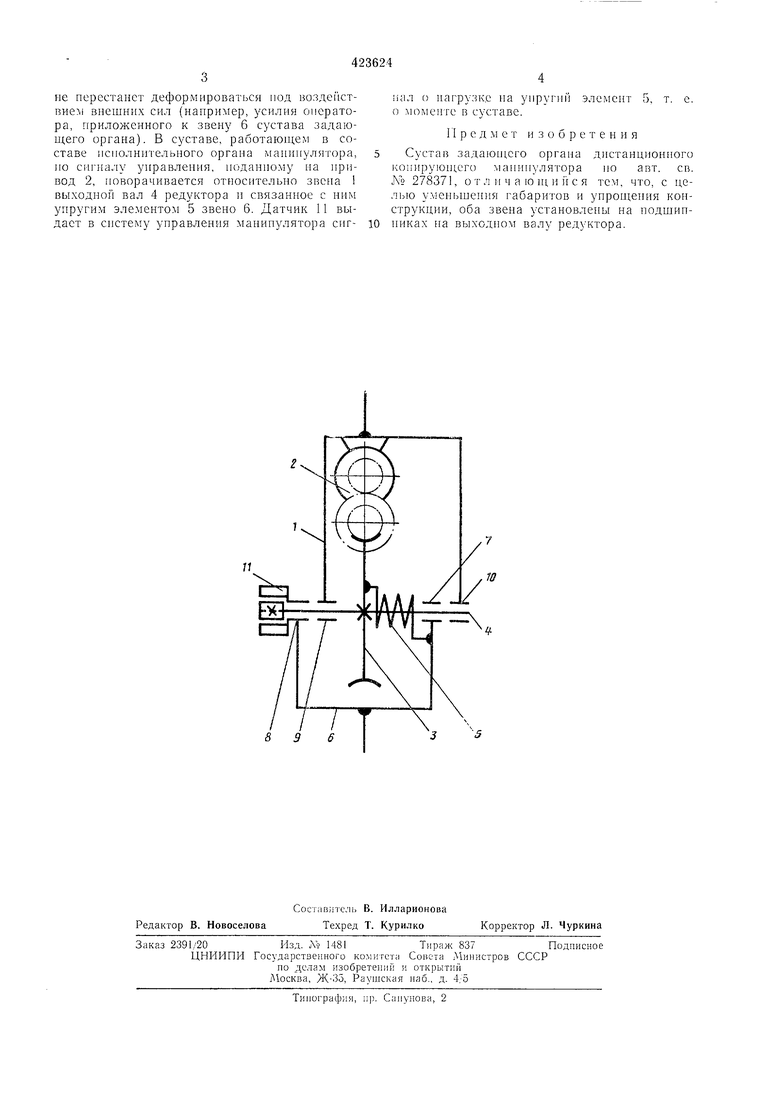
На чертеже представлена кинематическая схема предлагаемого сустава манипулятора.
Сустав манипулятора содержит звено 1, на котором установлен привод 2 с редуктором, выходное колесо 3 которого жестко закреплено на выходном валу 4 редуктора и через упругий элемент 5 соединено со звеном 6. Звено 6 устаповлепо па выходном валу редуктора па подшипниках 7 п 8, а звено 1 - на нодшипниках 9 и 10. Датчик 11, измеряющий дефор.мацию уиругого элемента 5, размещен между выходным валом 4 редуктора и звеном 6.
Поворот звена б под действпем внеппшх сил вокруг выходного вала 4 редуктора подшишгиках 7 и 8 приводит к деформации упругого элемента 5, которая измеряется датчиком 1К сигнал которого через систему управления iaнипyлятopa передается в привод 2, установленный на звене 1. Привод отрабатывает сигнал датчика и поворачивает выходное колесо редуктора, жестко закрепленное на выходном валу редуктора, относительно звена 1, установленного па этом валу на подшипниках 9 и 10. Поворот выходиого вала редуктора продолжается до тех пор, пока упругий элемент
не перестанет деформироваться иод воздействием внешних сил (нанример, усилия оператора, приложенного к звену 6 сустава задаюnj,ero органа). В суставе, работающем в составе исполнительного органа манипулятора, по сигна;1у управления, поданному па иривод 2, поворачивается относительно звена выходной вал 4 редуктора н связанное с нны упругим элементом 5 звено 6. Датчик 11 выдает в систему управления манипулятора сигпал о нагрузке на упругий
элемент
т. о и:) в суставе.
И р е д м е т изобретения
Сустав задаюи1,его органа дистанционного коиируюп1,его мапипулятора по авт. св. № 278371, от л II ч а 10 HI и и с я тем, что, с целью умешянения габаритов и унрон1,ения конструкции, оба звена установлены на подшинииках па выходном валу редуктора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сустав задающего органа дистанционного копирующего манипулятора | 1972 |
|
SU444634A1 |
| Устройство для управления суставом очувствленного копирующего манипулятора | 1974 |
|
SU548413A1 |
| СУСТАВ ЗАДАЮЩЕГО ОРГАНА ДИСТАНЦИОННОГО КОПИРУЮЩЕГО МАНИПУЛЯТОРА | 1970 |
|
SU278371A1 |
| Сустав задающего органа дистанционного копирующего манипулятора | 1977 |
|
SU627959A1 |
| Устройство для управления дистанционным манипулятором | 1977 |
|
SU639699A2 |
| Манипулятор | 1972 |
|
SU446411A2 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБСАЖЕННЫХ СКВАЖИН | 2008 |
|
RU2380535C1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| РЕГУЛЯТОР ТЕМПЕРАТУРЫ ПРЯМОГО ДЕЙСТВИЯ | 1988 |
|
SU1831149A2 |
.
I
I
J5
