i.jpuii подключен к Ciii lidvlibd iup и lIpaE,l;ii() входу ключа.
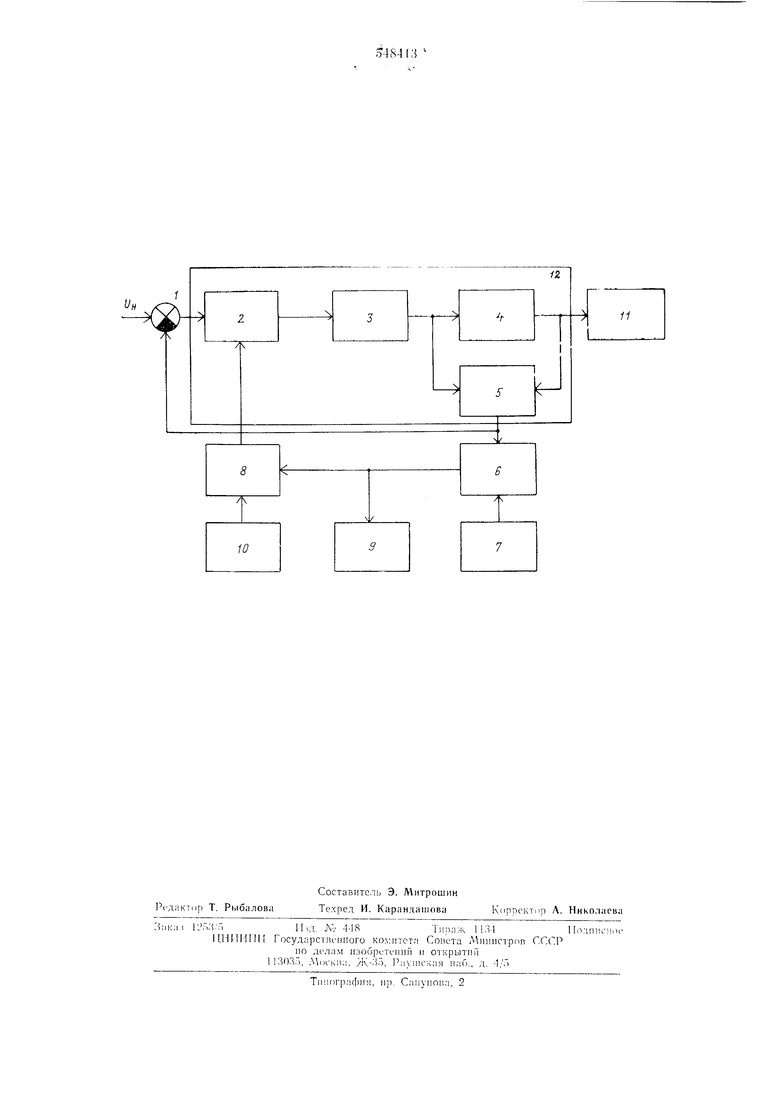
lla чс}) показана блок-схема устройства дл улрав.тения суставом очувствленного K(iiiiii)yi()iuer() манипулятора.
(чема содержит измс)итель рассогласования I, привод 2. исч)братимы 1 редуктор 3, уиj)yi4iii ч;1емеит 4, датчик нагрузки 5, схему сравнения (, (гчннк :)та;юнного си1нала 7, к;п()ч 8, сиг 1а;1нзат()р 9, ис10чии1 И1ггания 10. Оиерагор 1 i jip; B,iHei суставом задаюицмч) ojiraiia 12.
NcTpi)i icTii() panuTai. е.КДу|)И1,им образом. ()не|);г()|1 11, |,о.Д1,ч1СТв я на суставы ..адаюHie (j opiaiia 12, нрав.тяет со(Лветств IOHUI I
()рниоиа,:П)Нын величине иаг|)узк11 иа с ставе исполиителвиого органа. Привод 2 отрабатывает- eio и через необратимви редуктор 3 закручивает уиругий элемент 4. Момеит, создаваемвп уиругим элементом 4, нередается оиератору 11 и измеряется дат чиком нагрузки 5, сигнал с вв1хода которого постуиает на вврпггаклций вход измерите.тя рассогласования 1, где а.т1ебраически суммируется с сигналом Uu.
Привод 2 отрабатв1вает входной сигнал и закручивает уиругий элемент 4 до тех иор, пока сигнал с датчика иаг)узки 5 не с)авняетея с сигналом L-,,, нронорцнональным наг)узке на иенолннтелвном органе. Таким образом, оиератор 11 ои1уи1ает усилия, иронорннональные нагрузке на нсполнителвном орIaiie. При перегрузке зиачите;1Г)Но возрастает сигнал L,;, нрнвод 2 отрабат)1вает его н, так как онератор 1 1 н)одолжает возде1 |ств()) на задаюнип орган, через neo6inniiMi)iii редуктор 3 ен1е более закручивает унруг)1Й элемент 4. На датчика нагрузки о воз{)астает сигнал.
Как только величины сигналов датчика агрузки 5 и источиика эталоииого сиги ал а 7 сравняются, срабатвшает схема сравиения П, с выхода которой поступает сигпал па управляюнтий вход ключа 8 и сигиализатор 9. Ключ 8 разрывает ценв питания привода 2 от
нсючннк пи1ання 10, в чего дв жение задаюгцего органа прекращается. Оператор с помонцзю снгнализатора 9 определяет, что манипулятор иерегружен. Для СИ5ГГИЯ перегрузки оиератор изменяет нан)ав.ленне возде11етвня на задаюн;ий орган, )аскручивается ун)угнй элемент 4, уменьн1аетея вел)1чина снгнала с датчика нагрузки 5, выключаетея схема сравнения В, восстанавлииается не)П) ннтання привода 2, задающш и иснолнител1Д1ый органв перемещаются в обратно.м нанравленнн. в результате чего jseлнчина на1руз1 и иа нсно.иште.твном opi-анс мещлнается.
4акос ньлю.шенис 4-rp(iiicTiia иозволяе снизит1 учомляемосп, оператора и тем самым иовыситТ) ercj работ(:1СНОсоСчк)сть. С)дноВ)еменно умен1 1нается вepoятчuJCTl) но1;р1.ждеиия с етавов манииу.тятора н)Н его )к1Н1рузка,.
Ф о р м у л а н 3 о б р е т е н н я
етройстио для унра1.тения суставом очувствленного коннр чощего манннулят ора, содержан1,ее источник иитання, последовательно еоеднненные нривод, необратимый редукто) п упругий элемент, датчик иагрузки, входы ICoторого соединены соответственно с выходами необратимого редуктора и упругого элемента, и измеритель рассогласования, вычитающий вход которого подключен к выходу датчнка нагрузки, а выход соеди)1еп с входом п)ивода, отличающееся тем, что, с снижения утомляемости онератора путем oiраннчения предельпой отражеппой nai-рузкн на eio руку, устройство содержит схему сравнения, спгнализатор, источник эталонного сигнала и ключ, через который источник питаиия соединен с нриводом, а выходы нсточника эталонного снгнала н датчика иаг)узкл соединены с соотвстствуюншми входами схемы с)аБненпя, выход которой подключеп к сигнализатору и унравляюнтему входу ключа. Источники информации, иринятые во вннманне ирн экспертизе:
1.Лит. св. .Yo 368020. кл. В 25j 1/00, 1971.
2.Авт. св. До 278371, кл. В 23q 7/04, 1969 (прототин).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления суставом очувствленного дистанционного копирующего манипулятора | 1974 |
|
SU559820A1 |
| Устройство для управления манипулятором | 1973 |
|
SU552184A1 |
| СУСТАВ ЗАДАЮЩЕГО ОРГАНА ДИСТАНЦИОННОГО КОПИРУЮЩЕГО МАНИПУЛЯТОРА | 1970 |
|
SU278371A1 |
| ВПТБ -г.|'1||?1 t*'?f^n^'"Tp.-.7 I | 1973 |
|
SU406718A1 |
| МАНИПУЛЯТОР С ОСЯЗАТЕЛЬНЫМ ОЧУВСТВЛЕНИЕМ | 1969 |
|
SU234763A1 |
| Устройство для управления дистан-циОННыМ КОпиРующиМ МАНипуляТОРОМ | 1979 |
|
SU809048A1 |
| Привод для сустава задающего органа копирующего манипулятора | 1974 |
|
SU511201A1 |
| Сустав задающего органа дистанционного копирующего манипулятора | 1972 |
|
SU444634A1 |
| Очувствленный дистанционный копирующий манипулятор | 1973 |
|
SU501864A1 |
| Система управления суставом очувствленного манипулятора | 1978 |
|
SU748341A1 |