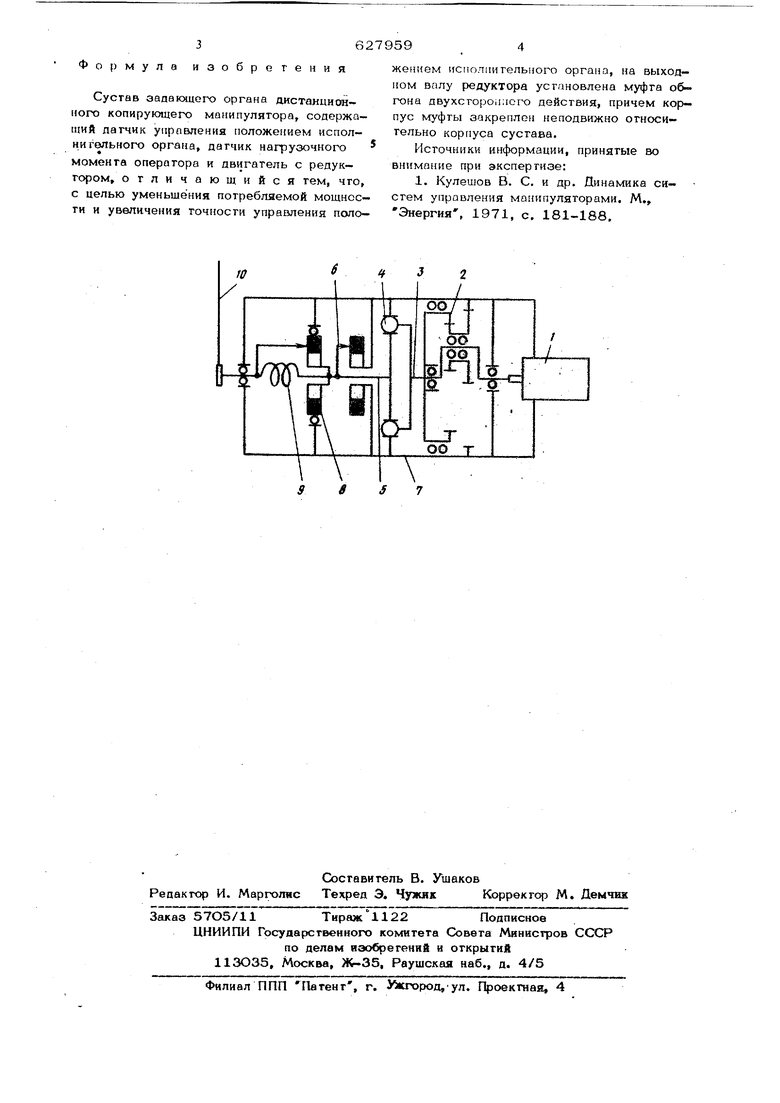
Изобрегение относится к станкосфое- нию и может быть использовано в задак щих органах коаирукяцих манипуляторов. Известен сустав задающего органа дистанционного копирующего манипулятора, содержащий датчик управления положением исполнительного органа, датчик нагрузочн го момента оператора и двигатель с реду тором flj . У известного устройства низкий коэф- фициент полезного действия и небольшая точность управления положением исполнительного органа. Цель изобретения - уменьшение потребля мой мошносги и увеличение точности управления положением исполнительного органа. Эта цель досгигаегся благодаря тому, что на выходном валу редуктора предлагаемого сустава установлена муфта обгон двухстороннего действия, причем корпус улуфты закреплен неподвижно относительно корпуса сустава. На чертеже представлена кинематическая схема сустава задающего органа дистанционного коаируклцего манипулятора Сустав задакдцего органа имеет двигатель 1, редуктор 2, например планетарный редуктор с двумя внутренними задаплвнн ми, на выходном валу 3 которого установлена муфта 4 обгона ,двухст шнего действяя. с выходным валом 5 муфты 4 caia- зан ротор датчика 6 управления положением исполнительного органа, а его статор закреплен на корпусе 7 сустава, корлус муфты 4 закреплен неподвижно в корпусе сустава 7. С валом 5 связан также статордатчика 8 нагрузочного момента оператора и упругий элемент 9, который, в свою очередь, жестко сввзан с ротором датчика 8 и звеном 1О задающего органа. Сустав работает следующим образом При повороте звена 1О крутшпий момент через-упругий элемент 9 передается на выходной вал 5 муфты 4. Муфта 4 при этом заклинивается, передавая усилие на корпус 7 сустава. При передаче крутшцего момента двигателя 1 вал 3 редуктора 2 поворачивается, расклинивая муфту, и приводит в движение ее выходной вал 5 и чв- рез упругий элемент-звено 1О.
Формула изобретения
Сустав задающего органа дистанционного копирующего манипулятора, содержащий датчик управления положением исполнигеяьного органа, датчик нагрузочного момента оператора и двигатель с редуктором, отличающийся тем, что, с целью уменьшения потребляемой мощности и увеличения точности управления положением ясполиительного органа, на выходном валу редуктора установлена муфта обгона двухсгорои;1сго действия, причем корпус муфты закреплен eпoдвижнo относительно корпуса сустава.
Источники информации, принятые во внимание при экспертизе:
1. Кулешов В. С, и др. Динамика систем управления манипуляторами. М., Энергия, 1971, с. 181-188.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сустав задающего органа дистанционного копирующего манипулятора | 1972 |
|
SU444634A1 |
| СУСТАВ ЗАДАЮЩЕГО ОРГАНА ДИСТАНЦИОННОГО КОПИРУЮЩЕГО МАНИПУЛЯТОРА | 1970 |
|
SU278371A1 |
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650428A2 |
| СУСТАВ ЗАДАЮЩЕГО ОРГАНА ДИСТАНЦИОННОГО КОПИРУЮЩЕГО МАНИПУЛЯТОРА | 1972 |
|
SU423624A1 |
| Устройство для управления дистанционным манипулятором | 1977 |
|
SU639699A2 |
| Моментный загружатель манипулятора | 1985 |
|
SU1240582A1 |
| Устройство для управления дистанционным манипулятором | 1976 |
|
SU582960A1 |
| Устройство для управления дистан-циОННыМ КОпиРующиМ МАНипуляТОРОМ | 1979 |
|
SU809048A1 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU883862A2 |
| Стенд для испытания электроприводов | 2020 |
|
RU2737738C1 |
6tt 32
9 в S 7
