1
Изобретение относится к области абразивной обработки металлов, а именно к обработке кромок плоских деталей любой конфигурации.
Известна установка для абразивной обработки кромок деталей, выполненная в виде рамы, перемещающейся по рельсам над закрепленными обрабатываемыми деталями и смонтированной на ней с возможностью перемещения вдоль ее каретки с вращающимся инструментом.
Известная установка не позволяет обрабатывать кромки деталей любой конфигурации и не обеспечивает равномерного износа абразивного круга.
Цель изобретения - устранение указанных недостатков.
Достигается это тем, что перемещения рамы кинематически связаны с перемещениями каретки носредством узла поворота, например, вращаемого от электропривода ролика, разворачиваемого посредством своего электропривода, по сигналу индуктивного датчика, передаваемого на него, причем электропривод одновременно кинематически связан с поворотной колонной, на которой консольно закреплены инструмент с автономным приводом н индуктивный датчик. Кроме того, колонна совершает возвратно-поступательные движения по вертикали, например от кривощипно2
шатунного механизма, установленного в каретке.
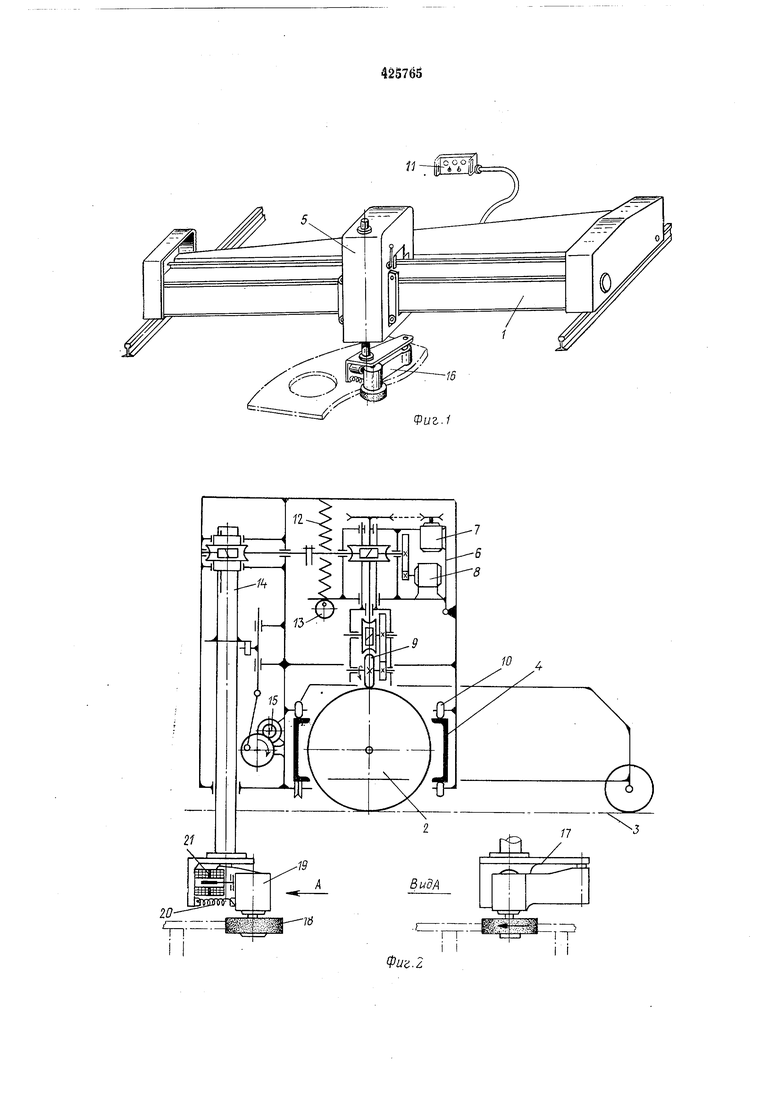
На фиг. 1 изображена установка, общий вид; на фиг. 2 - кинематическая схема.
Рама 1 установлена на тележке, снабженной ходовыми колесами 2, на которых она может перемещаться по рельсам 3, установленным над стендом с обрабатываемыми деталями.
Рама имеет направляющие 4, между которыми установлен на подшипниках цилиндр соосно с двумя ведущими колесами. Каретка 5, внутри которой на кронштейне 6 установлены электродвигатели постоянного тока 7, 8
и кинематические цепи привода главного движения и новоротиого ведущего ролика 9, может неремещаться вдоль направляющих на колесах 10. Привод главного движения, движения абразивиого инструмента вдоль кромки детали, выполнен в виде поворотного ведущего ролика, соединенного через клнноременную, червячную и зубчатую передачи с электродвигателем постоянного тока, скорость вращения
которого задает оператор с помощью реостата па пульте И. Пружина 12 прижимает ролик к цилиндру. Для расцепления их предусмотрено эксцентриковое устройство 13.
Привод поворота состоит из электродзигателя постоянного тока, соединенного через
зубчатую и червячную передачи с углом поворота ведущего ролика вокруг вертикалоной оси и посредством скользящей шпонки с поворотной колонной 14, последняя совершает возвратно-поступательные движения в вертикальной плоскости с помощью кривошипношатунного механизма с электродвигателем 15.
На колонне консольно закреплен рабочий механизм 16, выполненный в виде кронштейна 17, на котором шарнирно закреплен инструмент 18, например абразивный круг с автономным приводом 19, например пневмомашиной. Пружина 20 прижимает инструмент к обрабатываемой кромке. С корпусом автономного привода инструмента шарннрно соединен сердечник индуктивного датчика 21, катушка которого закреплена на кронштейне.
Установка работает следующим образом.
Рабочий с помощью потенциометра на пульте задает скорость вращения двигателя главного движения. Последний приводит во вращение поворотный ведущий ролик, который прижимается пружиной к цилиндру и обкатывается по его поверхности. Если ось поворотного ведущего ролика параллельна оси цилиндра, вращение его за счет сил трения вызывает вращение цилиндра и перемещение рамы по рельсам. Если ось поворотного ведущего ролика перпендикулярна оси цилиндра, то вращение его вызывает перемещение каретки по направляющим рамы при неподвижном цилиндре.
Если обрабатываемая кромка прямолинейна, проекция оси вращения колонки совпадает с точкой касания круга и кромки. При этом сердечник индуктивного датчика находится в нейтральном положении, усилие поджатия круга равно заданной величине, напряжение на выходе индуктивного датчика равно нулю, скорость двигателя поворота также равна нулю и вектор скорости совпадает с касательной к кромке детали. Если при движении установки кромка детали отклоняется вправо
или влевО; Происходит смещение точки касания инструмента относительно оси вращения колонны, смещение сердечника датчика, в результате чего вращающийся инструмент автомагически движется вдоль кромки детали произвольной конфигурации с постоянной скоростью.
Для стабилизации величины силы нрижатия инструмента к детали независимо от кривизны кромки и скорости движения потенциометр, задающий скорость, механически объединен с потенциометром на выходе индуктивного датчика. При подходе инструмента к краю детали
(углу кромки) следящая система должна быть отключена.
Предмет изобретения
1. Установка для абразивной обработки кромок плоских деталей, выполненная в виде рамы, перемещающейся по рельсам над закрепленными обрабатываемыми деталями и смонтированной на ней с возможностью перемещения вдоль ее каретки с вращающимся инструментом, отличающаяся тем, что, с целью автоматизации обхода контура детали любой конфигурации, перемещения рамы кинематически связаны с перемещениями каретки посредством узла поворота, например, вращаемого от электропривода ролика, разворачиваемого посредством своего электропривода, по сигналу индуктивного датчика, передаваемого на него, причем электропривод одновременно кинематически связан, с поворотной колонной, на которой консольно закреплен инструмент с автономным приводом и индуктивный датчик. 2. Установка по п. 1, отличающаяся
тем, что, с целью равномерного износа абразивного круга, колонна совершает возвратнопоступательные движения по вертикали, например, от кривошипно-шатунного механизма, установленного в каретке.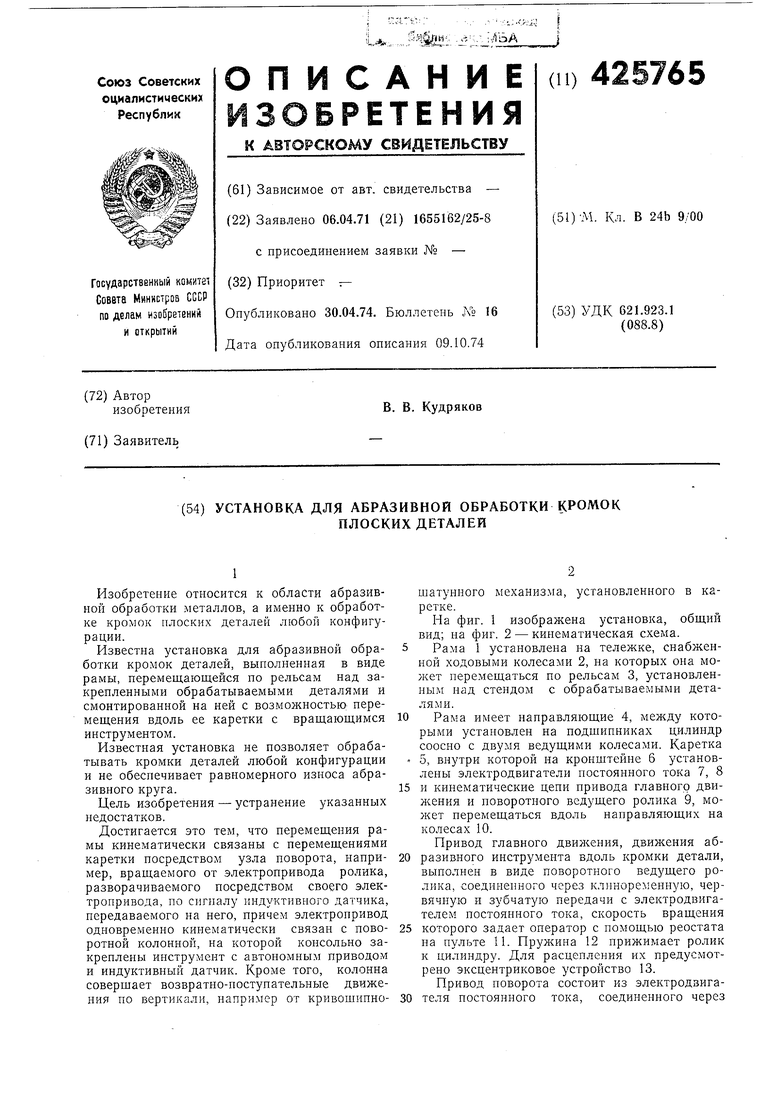
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ ПОДВЕСНОГО ТИПА ДЛЯ ДУГОВОЙ СВАРКИ | 1972 |
|
SU326026A1 |
| ШЛИФОВАЛЬНЫЙ СТАНОК С МНОЖЕСТВОМ ПАРАЛЛЕЛЬНЫХ АБРАЗИВНЫХ ЛЕНТ ДЛЯ ОДНОВРЕМЕННОГО ШЛИФОВАНИЯ ПОВЕРХНОСТЕЙ ОБРАБАТЫВАЕМЫХ ДЕТАЛЕЙ | 1993 |
|
RU2116880C1 |
| УСТРОЙСТВО ДЛЯ ДВУСТОРОННЕЙ ОБРАБОТКИ КРИВОЛИНЕЙНЫХ ПОВЕРХНОСТЕЙ ЛОПАТОК ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 1988 |
|
SU1693824A1 |
| ЛЕНТОШЛИФОВАЛЬНЫЙ СТАНОК ДЛЯ ОБРАБОТКИ ПРОФИЛЕЙ В ЗОНЕ СВАРНЫХ СТЫКОВ | 1966 |
|
SU216466A1 |
| Устройство для шлифования криволинейных поверхностей | 1987 |
|
SU1450982A1 |
| Станок для двухстороннего шлифования деталей аэродинамического профиля абразивными лентами | 1978 |
|
SU905009A1 |
| Устройство для снятия фасок на кулачках | 1984 |
|
SU1263429A1 |
| УСТРОЙСТВО ДЛЯ ШЛИФОВАНИЯ СФЕРИЧЕСКИХ ПОВЕРХНОСТЕЙ (ВАРИАНТЫ) | 2007 |
|
RU2450905C2 |
| Промышленный робот | 1987 |
|
SU1481057A1 |
| Устройство для обработки плоских поверхностей деталей | 1982 |
|
SU1047667A1 |