Изобретение относится к автоматике и предназначено для прецизионной стабилизации астронмоических телескопов, установленных на подвижном основании в опорно-поворотных устройствах.
Цель изобретения - повышение точности и расширение функциональных возможностей системы.
Цель достигается тем, что в предлагаемую систему введен контур управления астродатчиком, обеспечивающий его перемещение относительно корпуса телескопа в направлении, противоположном угловым поворотам телескопа вокруг оптической оси, чем обеспечивается инвариантность астродатчика к этим поворотам телескопа.
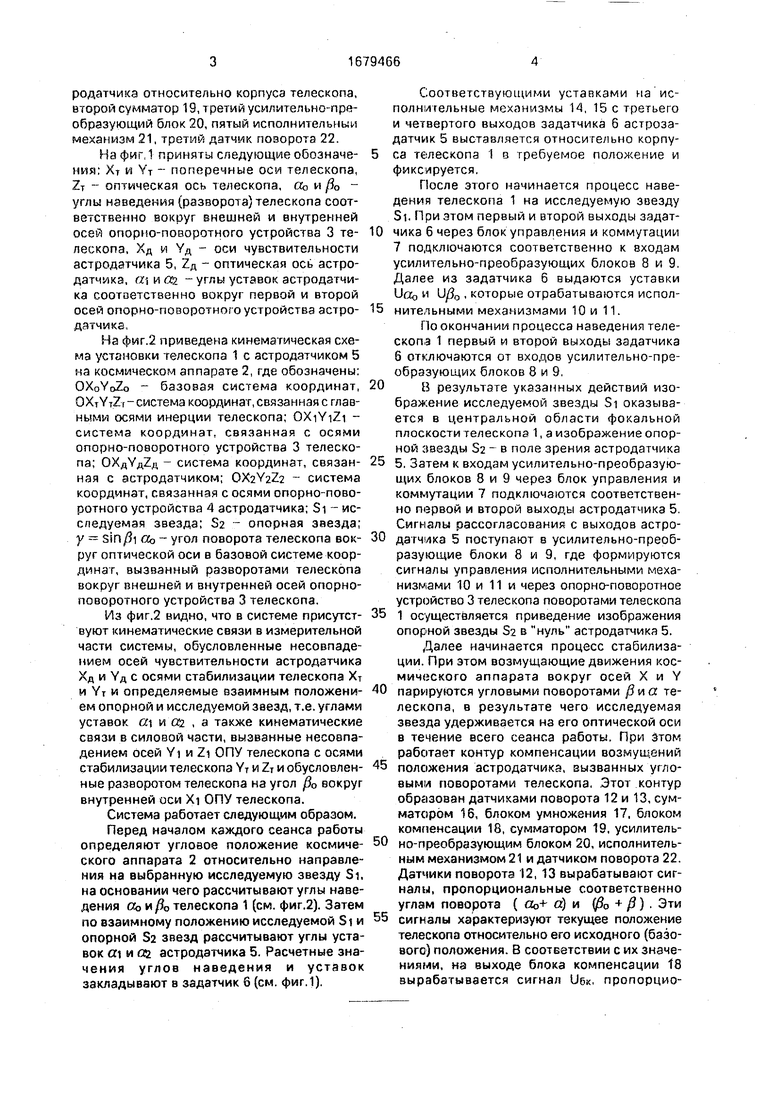
На фиг. 1 приведена функциональная схема системы ориентации и стабилизации астрономического телескопа; на фиг.2 - кинематическая схема установки телескопа.
Система содержит телескоп 1, космический аппарат 2, опорно-поворотное устройство (ОПУ) 3 телескопа, опорно-поворотное устройство 4 астродатчика, двухкоординат- ный астродатчик 5, задатчик 6, блок управления и коммутации 7, первый 8 и второй 9 усилительно-преобразующие блоки, первый 10 и второй 11 исполнительные механизмы, первый 12 и второй 13 датчики поворота, третий 14 и четвертый 15 исполнительные механизмы, первый сумматор 16, блок умножения 17, блок 18 компенсации перемещения астON VI Ч) а О
родатчика относительно корпуса телескопа, второй сумматор 19, третий усилительно-преобразующий блок 20, пятый исполнительный механизм 21, третий датчик поворота 22.
На фиг 1 приняты следующие обозначения: Хт и YT - поперечные оси телескопа, ZT - оптическая ось телескопа, а0 и/30 - углы наведения (разворота) телескопа соответственно вокруг внешней и внутренней осей опорно-поворотного устройства 3 телескопа, Хд и Уд - оси чувствительности астродатчика 5, 7Д - оптическая ось астродатчика, щ и оа - углы уставок астродатчика соответственно вокруг первой и второй осей опорно-поворотного устройства астродатчике,
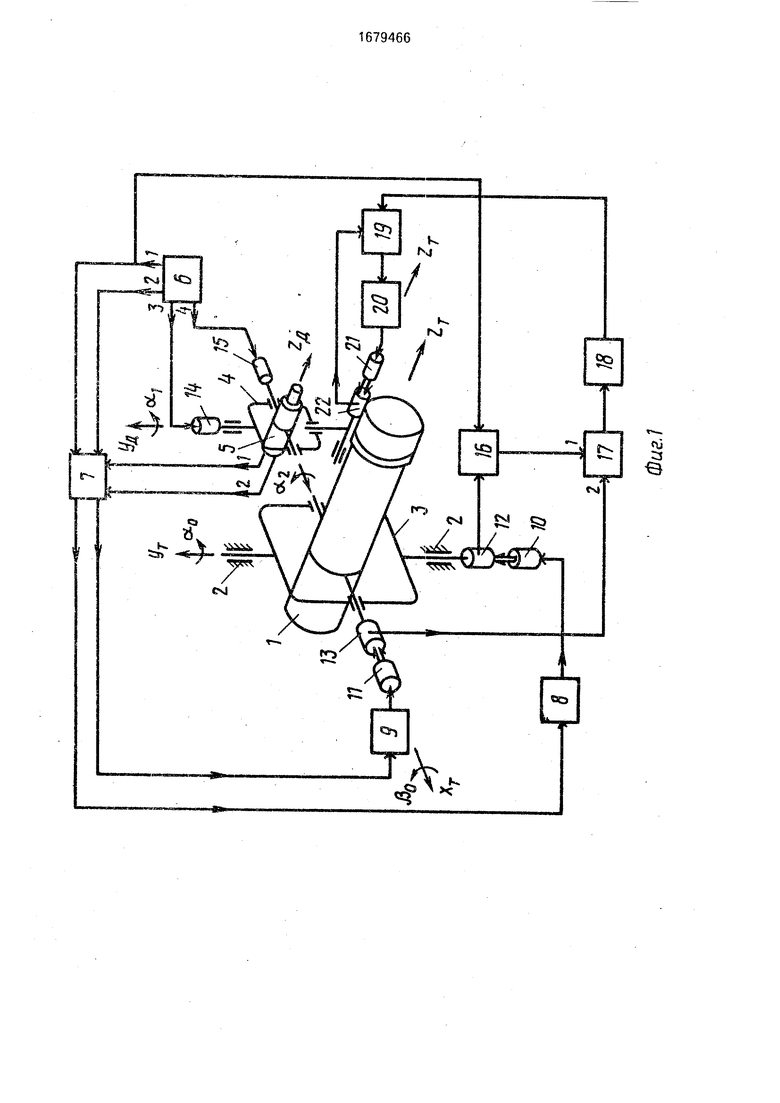
На фиг.2 приведена кинематическая схема установки телескопа 1 с астродатчиком 5 на космическом аппарате 2, где обозначены: OXoYoZo - базовая система координат, OXTYTZr-система координат, связанная с главными осями инерции телескопа; OXiYiZi - система координат, связанная с осями опорно-поворотного устройства 3 телескопа; ОХдУд7д - система координат, связанная с астродатчиком; OXaY2Z2 - система координат, связанная с осями опорно-поворотного устройства 4 астродатчика; Si - исследуемая звезда; $2 - опорная звезда; у - OQ - угол поворота телескопа вокруг оптической оси в базовой системе коор- динаг, вызванный разворотами телескопа вокруг внешней и внутренней осей опорно- поворотного устройства 3 телескопа.
Из фиг.2 видно, что в системе присутствуют кинематические связи в измерительной части системы, обусловленные несовпадением осей чувствительности астродатчика Хд и YA с осями стабилизации телескопа Хт и YT и определяемые взаимным положением опорной и исследуемой заезд, т.е. углами уставок а и с& , а также кинематические связи в силовой части, вызванные несовпадением осей YI и Zi ОПУ телескопа с осями стабилизации телескопа YT и ZT и обусловленные разворотом телескопа на угол Д вокруг внутренней оси Xi ОПУ телескопа.
Система работает следующим образом. Перед началом каждого сеанса работы определяют угловое положение космического аппарата 2 относительно направления на выбранную исследуемую звезду Si, на основании чего рассчитывают углы наведения OQ телескопа 1 (см. фиг.2). Затем по взаимному положению исследуемой Si и опорной S2 звезд рассчитывают углы уставок а и 05 астродатчика 5. Расчетные значения углов наведения и уставок закладывают в задатчик 6 (см. фиг.1).
Соответствующими уставками на исполнительные механизмы 14, 15 с третьего и четвертого выходов задатчика 6 астроза- датчик 5 выставляется относительно корпуса телескопа 1 в требуемое положение и фиксируется,
После этого начинается процесс наведения телескопа 1 на исследуемую звезду Si. При этом первый и второй выходы задатчика 6 через блок управления и коммутации 7 подключаются соответственно к входам усилительно-преобразующих блоков 8 и 9. Далее из задатчика 6 выдаются уставки Ucto и , которые отрабатываются исполнительными механизмами 10 и 11.
По окончании процесса наведения телескопа 1 первый и второй выходы задатчика 6 отключаются от входов усилительно-преобразующих блоков 8 и 9,
ц результате указанных действий изображение исследуемой звезды Si оказывается в центральной области фокальной плоскости телескопа 1, а изображение опорной звезды S2 в поле зрения астродатчика
5. Затем к входам усилительно-преобразующих блоков 8 и 9 через блок управления и коммутации 7 подключаются соответственно первой и второй выходы астродатчика 5. Сигналы рассогласования с выходов астродатчика 5 поступают в усилительно-преобразующие блоки 8 и 9, где формируются сигналы управления исполнительными механизмами 10 и 11 и через опорно-поворотное устройство 3 телескопа поворотами телескопа
1 осуществляется приведение изображения опорной звезды S2 в нуль астродатчика 5.
Далее начинается процесс стабилизации. При этом возмущающие движения космического аппарата вокруг осей X и Y
0 парируются угловыми поворотами телескопа, в результате чего исследуемая звезда удерживается на его оптической оси в течение всего сеанса работы. При этом работает контур компенсации возмущений
5
положения астродатчика, вызванных угловыми поворотами телескопа, Этот контур образован датчиками поворота 12 и 13, сумматором 16, блоком умножения 17. блоком компенсации 18, сумматором 19, усилительно-преобразующим блоком 20, исполнительным механизмом 21 и датчиком поворота 22. Датчики поворота 12, 13 вырабатывают сигналы, пропорциональные соответственно углам поворота ( Оо+ а) и (#0 + fl) . Эти
сигналы характеризуют текущее положение телескопа относительно его исходного (базового) положения. В соответствии с их значениями, на выходе блока компенсации 18 вырабатывается сигнал Убк, пропорциональный кинематическим угловым поворотам у а sin Дз + / телескопа вокруг оптической оси YI опорно-поворотного устройства 3 Сигнал De сравнивается в сумматоре 19 с сигналом датчика поворота 22 и через усилительно-преобразующий блок 20 поступает на вход исполнительного механизма 21, который, отрабатывая рассогласование на входе усилительно-преобразующего блока 20, разворачивает астродатчик 5 вокруг третьей оси опорно-поворотного датчика, параллельной оптической оси телескопа на угол, противоположный углу у(см. фиг.1). При этом астродатчик 5 оказывается инвариантным к угловым поворотам у, совершаемым телескопом вокруг своей оптической оси в процессе стабилизации, а это значит, что компенсируется влияние на работу системы кинематических обратных связей, которые структурно охватывают каналы стабилизации.
Таким образом, благодаря перемещениям астродатчика 5 относительно корпуса телескопа вокруг его оптической оси в направлении, противоположном угловым поворотам телескопа, вызванным кинематическими особенностями системы ориентации и стабилизации, повышается точность системы.
Так, например, для случая, когда телескоп развернут вокруг внутренней оси опср- но-поворотного устройства на угол /5 15°, угловое расстояние между исследуемой и опорной звездами равно 1°, а амплитуда качки космического аппарата вокруг поперечной оси Y телескопа составляет ±2 угл.мин, компенсируемая ошибка стабилизации по каждому каналу примерно равна ±0,5 угл.с. Компенсация ошибки стабилизации позволяет ослабить требования по ограничению величины угла /3 , в результате чего расширяются функциональные возможности работы системы, связанные с выбором исследуемых звезд.
Формула изобретения
Система ориентации и стабилизации астрономического телескопа, содержащая установленное на космическом аппарате двухосное опорно-поворотное устройство телескопа, внутренняя рамка которого кинематически соединена с телескопом, содержащая двухкоординатный астродатчик, задатчик, блок управления и коммутации, два усилительно-преобразующих блока, четыре исполнительных механизма, два датчика поворота, встроенные соответственно по внешней и внутренней осям опорно-поворотного устройства телескопа, установленное на телескопе опорно-поворотное устройство астродатчика, первая и вторая оси которого в исходном состоянии параллельны соответственно внешней и внутренней осям опорно-поворотного устройства телескопа, а внутренняя рамка кинематически соединена с астродатчиком, первые выходы аст- 5 родатчика и задатчика соединены через блок управления и коммутации с входом первого усилительно-преобразующего блока, вторые выходы астродатчика и задатчика соединены через блок управления и коммутации с вхо0 дом второго усилительно-преобразующего блока, выходы первого и второго усилительно- преобразующих блоков соединены с входами соответствующих исполнительных механизмов, выходы которых кинематически соеди5 нены соответственное внешней и внутренней осями опорно-поворотного устройства телескопа, третий и четвертый выходы задатчикэ соединены соответственно с входами третьего и четвертого исполнительных механизмов,
0 выходы которых кинематически соединены соответственно с первой и второй осями опорно-поворотного устройства астродатчика, отличающаяся тем, что, с целью повышения точности и расширения функци5 ональных возможностей за счет возможности разворота астродатчика относительно корпуса телескопа, в нее введены блок умножения, два сумматора, блок компенсации перемещения астродатчика относительно те0 лесхопа, третий усилительно-преобразующий блок, пятый исполнительный механизм, третий датчик поворота, а опорно-поворотное устройство астродатчика выполнено трехосным, причем его третья ось является
5 внешней по отношению к. двум другим осям и параллельна оптической оси телескопа, выход первого датчика поворота соединен с неинвертирующим входом первого сумматора, выход которого соединен с первым
0 входом блока умножения, выход второго датчика поворота соединен с вторым входом блока умножения, выход которого соединен с входом блока компенсации перемещения астродатчика относительно
5 корпуса телескопа, соединенного выходом с неинвертирующим входом второго сумматора, выход которого соединен с входом третьего усилительно-преобразующего блока, соединенного выходом с входом пятого
0 исполнительного механизма, выход которого кинематически соединен с третьей осью опорно-поворотного устройства астродатчика, инвертирующий вход второго сумматора соединен с выходом третьего датчика
5 поворота, встроенного по третьей оси опорно-поворотного устройства астродатчика, а инвертирующий вход первого сумматора соединен с первым выходом задатчика.
u 3
e

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для астроориентации телескопа | 1975 |
|
SU697972A2 |
| Устройство для астроориентации телескопа | 1973 |
|
SU487377A1 |
| Система астроориентации и стабилизации телескопа | 1978 |
|
SU769499A1 |
| Система управления телескопом | 1980 |
|
SU972479A1 |
| Система астроориентации орбитального космического аппарата с обратными связями | 2023 |
|
RU2812876C1 |
| Система для астроориентации телескопа | 1976 |
|
SU648954A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕИСПРАВНОСТЕЙ ГИРОСКОПИЧЕСКОГО ИЗМЕРИТЕЛЯ ВЕКТОРА УГЛОВОЙ СКОРОСТИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2655008C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
| СПОСОБ КАРТОГРАФИРОВАНИЯ НЕБЕСНОЙ СФЕРЫ И КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2014252C1 |
| СИСТЕМА АСТРООРИЕНТАЦИИ И СЛЕЖЕНИЯ | 1971 |
|
SU428211A1 |
Изобретение относится к автоматике и предназначено для прецизионной стабилизации астрономических телескопов, установленных на космических аппаратах в опорно-поворотных устройствах. Цель изобретения - повышение точности и расширение функциональных возможностей системы ориентации и стабилизации. В системе телескоп установлен в двухосном опорно-поворотном устройстве, обеспечивающем его наведение в направлении на исследуемые звезды. Стабилизация телескопа осуществляется по сигналам двухкоординатного астродатчика, установленного на корпусе телескопа в отдельном опорно-поворотном устройстве. Астродатчик наводится на выбранные опорные звезды, расположенные под небольшими углами (порядка нескольких градусов) к оптической оси телескопа. Цель достигается тем, что в систему введен канал управления астродатчиком, обеспечивающим его перемещения относительно корпуса телескопа в направлении, противоположном угловым поворотам телескопа вокруг оптической оси, вызванным кинематическими особенностями системы, Этим достигается инвариантность астродатчика к указанным поворотам телескопа, что позволяет повысить точность системы ориентации и стабилизации, а также расширить ее функциональные возможности, 2 ил.
| Крмоян М.Н | |||
| Система управления автоматической работой аппаратуры Орион | |||
| Сообщения Бюроканской обсерватории, Вып | |||
| XIV | |||
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Астроследящие системы./Под ред | |||
| Че- моданова Б.К | |||
| М.: Машиностроение, 1977, с | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
