t
Изобретение относится к системам автоматического управления положением объектов в пространстве.
По основному авт.св. 487377 известно устройство, содержащее двухстепенной опорно-поворотный карданный подвес телескопа с приводами телескопа, два астродатчика, установленных на телескопе в двухстепенных опорно-поворотных карданных подвесах с приводами астродатчиков, датчики углов которых подключены к управляющему пульту, соединенному с управляющими блоками приводов телескопа и астродатчиков, при этом внешние оси двухстепенных опорноповоротных карданных подвесов астродатчиков установлены параллельно, а внутренние - перпендикулярно оптической оси телескопа 1.
Недостатком известного устройств яв:зяется то, что при его эксплуатац вслег.ствие воздействия транспортных нагрузок, а также из-за температурных воздействий окружаюгдей среды в конструкции рамы телескопа возникаю деформации. Эти деформации являются основным и определяющим источником остаточных погрешностей ориентации оптической оси телескопе относительно направлений на опорные звезды, на которые направлены астродатчики, т.е. источником инструментальных погрешностей ориентации оптической оси телескопа на объект наблюдения.
Цель изобретения - повышение точности устройства.
Указанная цель достигается тем,
что в предлагаемом устройстве установлены последовательно соединенные третий астродатчик, блок памяти и преобразователь координат, выход которого подключён к управляющему
пульту, а третий астродатчик ж.естко установлен на телескопе параллельно его оптической оси.
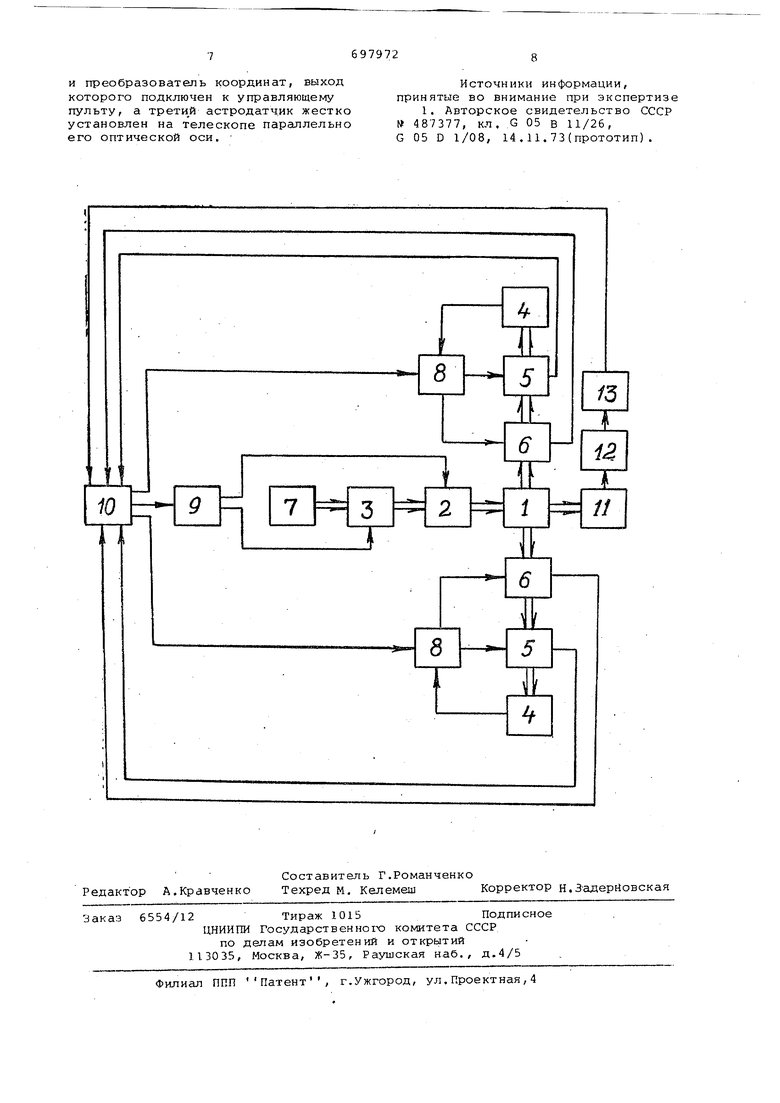
На чертеже изображена блок-схема устройства.
Устройство состоит из телескопа 1
с несущей рамой, двух электромеханических приводов 2 и 3 по осям двухстепенного опорно-поворотно го карданного подвеса (ОПП) телескопа, двух
астродатчиков (АД) 4 для звездной ориентации телескопа и четырех электромеханических приводов (по два на каждый АД, звездной ориентации) 5 и 6 по осям двухстепенных опорноповоротных карданных подвесов (ОПП). Привод 5 предназначен для поворота АД относительно телескопа вокруг внутренней оси ОПП АД, а привод 6 для поворота АД вокруг внаиней оси ОПП ДЦ. Устройство установлено на подвижном основании (ПО) 7, Каждый электромеханический привод (2,3,5 и 6) состоит из исполнительно го электродвигателя, механического понижающего редуктора с волновой передачей, датчиков обратных связей следящего привода по углу и по скорости и вспомогательных элементов (телеметрические датчики угла, концевые выключатели и др.), которые расположены в корпусе привода. Кроме того, в устройство входят управляющие блоки 8 астродатчиков, управляющий блок 9 телескопа, управляющий пульт 10, третий астродатчик 11, предназначенный для измерений остаточных ошибок ориентации телескопа, блок памяти 12 и преобра зователь координат 13 третьего астродатчика. В пульте 10 расположены четыре реверсивных счетчика, представляющи в совокупности задатчик для набора командных значений углов и преобразователь сигналов. В преобразовател сигналов с помощью двух синусно-косинусных прецизионных потенциометро приращения углов поворота АД 4 (по отношению к их командным значениям) преобразуются в управляющие напряже ния. Для измерения приращений углов используются пары вращающихся транс форматоров (ВТ), включенные в трансформаторном режиме. Устройство работает следующим образом. Перед началом работы телескопа в бирается видимый объект наблюдения (ОН) и производится необходимая для выбранного ОН грубая трехосная начальная ориентация и стабилизация П 7, осуществляемая с достаточно боль шими погреиностями (порядка 3-5 угл вых градусов по каждой из трех осей ПО). При этом телескоп и третий АД 11 грубо ориентированы на види1 5ый О После выполнения ориентации ПО оператор включает питание устройств и набирает на пульте 10 командные значения углов АД 4 в их ОПП. Затем оптические оси АД 4 автома чески ориентируются по внутренним и внешним осям их ОПП. Для зтого пере ключатель режимов-работы на пульте 10 ставят в соответствующее положение. При этом ВТ-приемники приводов и 6 подключаются ко входам управляю щих блоков 8, а выходы АД 4 отключа ся от входов блоков 8. Таким образо формируются четыре позиционных прив да ориентации АД 4 (по два на кажды АД). Эти приводы поворачивают АД 4 о внутренним и внаиним осям их ОПП а командные углы. По окончании двухосной /ставки о командным углам астродатчики 4 захватывают свои опорные звезды, что обеспечивается применением АД с достаточно широким полем зрения, перекрывающим пограиности начальной ориентации и стабилизации ПО 7. При этом устройство готово к работе в режиме астроориентации телескопа н а видимый ОН. При переводе системы в режим астроориентации телескопа (переключателем режимов на пульте 10) ВТприемники приводов 5 и 6 отключаются от входов управляющих блоков 8 и ВТ-приемники приводов 6 подключаются управляющим пультом 10 к его преобразователю сигналов. Выходы преобразователя сигналов уставок подключаются ко-входам управляющего блока 9, а выходы АД 4- к соответствующим входам блоков 8. Таким образом формируются шесть следящих приводов, четыре из которых, управляемые сигналами рассогласования АД 4, регулируют вращение АД 4 относительно телескопа поворотами в их ОПП так, чтобы оптические оси АД 4 были строго направлены на соответствующие опорные звеэды при всех возможных движениях телескопа. Два других следящих привода 2 и 3, управляемых рассогласованиями ВТ-приемников приводов 5 по отношению к соответствующим ВТ-датчикам задатчика управляющего пульта, регулируют вращение телескопа и жестко связанного с ним третьего АД 11 относительно по 7 при всех возможных движениях ПО. Ориентация оптических осей АД 4 на их опорные звезды путем поворотов АД 4 следящими приводами 5 и б относительно телескопа вызывает рассогласование между действительным угловым положением АД 4 и ОПП и их командными значениями. Сигналы ВТ-приегжиков приводов 5 поступают на вход, преобразователя сигналов уставок, откуда после преобразования поступают управляющие напряжения через управляющий блок 9 на приводы 2 и 3. Под действием этих приводов телескоп поворачивается в своем ОПП так, чтобы свести к нулю управляющие напряжения. Это вызывает уменьшение рассогласования АД и ВТ-приемников приводов 5 . Если оптические оси АД с помощью собственных следящих приводов точно направлены на опорные звезды и рассогласования ВТ-приемников приводов 5 равны нулю, то-телескоп и третий АД 11 остается направленными на ОН с точностью до остаточных погрешностей ориентации телескопа, основную И определяющую долю которых составляют ошибки из-за деформации его ра мы. При этом устройство готово к ра боте в режиме измерения остаточных ошибок ориентации телескопа. I При переводе устройства в режим измерения остаточных сшибок ориентации телескопа переключателем режимо на пульте 10 включается третий АД 1 .и в блоке 12 производится запоминани значений выходных напряжений АД ц, пропбрционсшьных остаточным ошибкам ориентации телескопа. При этом приводы 2,3,5 и б Продолжают работать в следящем режиме. Так обеспечиваетс измерение ошибок ориентации из-за погрешностей по одной оси поворота каждого АД 4 относительно телескопа Для измерения ошибок ориентации из-з погрешностей по второй оси поворота каждого АД 4 относительно телескопа производится еще одно измерение, отличающееся от предыдущего тем, что ПО 7 при этом повернуто в пространстве вокруг оптической оси телескопа на угол 90 угловых градусов. При этом каждый АД 4 требуется повернуть вокруг телескопа на 90 угловых градусов, тогда АД останутся ориентированными на те же опорные звезды, а телескоп - на выбранный видимый ОН. Для этого переключатель режимов возвpcш aют в положение режима астроориентации телескопа, третий АД 11 и блок памяти 12 автоматически выключа ются,- ПО 7 с помощью его собственной системы ориентации поворачивают вокру г оси, параллельной оптической оси телескопа, на 90 угловых градусо Астродатчики 4, удерживаемые следящими приводами 5 и 6 в направлении опорных звезд, автоматически поворачиваются относительно телескопа на тот же угол, что и ПО. После этого повторяют измерение и запоминание значений остаточных ошибок ориентации телескопа. На этом режш измерений закончен, устройство готово для ориентации телескопа на невидимые ОН с компенсацией остаточных ошибок ориентации. Если для ориентации телескопа на невидимые ОН могут бытьиспользованы те же опорные звезды, что и в режиме измерений при видимом ОН, то переориентацию телескопа можно произвести без выключения режима астроориентсщии телескопа изменением на пульте 10 показаний счетчиков, соответствующих взаимному угловому положению нового ОН и пр.ежних опорных звезд. При использовании для нового ОН новых опорных звезд производят режим начальной грубой ориентации ПО, двухосную установку АДв их ОПУ, после этого включают режи астроориентации телескопа, при этом указанные режимы осуществляются для невидимых ОН так же, как описано выше для видимого ОН. Для компенсации остаточных ошибок ориентации телескопа на невидимый ОН выход преобразователя координат 13, соединенного по входу с блоком памяти 12, соединяется с суммирующим входом преобразователя сигналов управляющего пульта, где его сигналы суммируются с сигналаг-ш ВТ-приемников приводов 5, что обеспечивается автоматически после установки.оператором на управляющем пульте 10 переключателя рода работ в положение невидимый ОН . При этом компенсирующие сигналы порождают на выходе преобразователя координат управляющего пульта 10 дополнительный управляющий сигнал. После прохождения управляющего блока 9 этот сигнал воздействует на приводы 2 и 3, под действием которых телескоп поворачивается в ОПП до тех пор, пока сигналы с ВТ-приемников приводов 5 станут равными по величине, но противоположными по знаку компенсирующим сигналам. Так происходит коррекция ориентации телескопа .на величину остаточных ошибок его ориентации на невидимый ОН, при этом в данном устройстве, в отличие от известного, для достижения ориентированного положения телескопа принципиально требуетмя неравенство нулю сигналов ВТ-приемников приводов 5. Если до ориентации тел ескопа на новую серию объектов наблюдения условия эксплуатации изменились по сравнению с теми, в которых производились первые измерения остаточных ошибок ориентации телескопа, то следует вновь произвести эти измерения. использование устройства позволит рааиирить круг задач астрофизических исследований, выполняемых с помощью телескопа, (например, станет возможным исследование пространственной структуры излучения объектов наблюдения, угловые размеры которых превосходят ошибку наведения телескопа), а также проводить-исследование двойных звезд, угловое расстояние между которыми больше ошибки наведения телескопа. Формула изобретения Устройство для астроориентации телескопа по авт.св.w 4В/37/, отличающееся тем, что, с целью повышения точности устройства, в нем установлены последовательно соединенные третий астродатчик, .блок памяти
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для астроориентации телескопа | 1973 |
|
SU487377A1 |
| Система для астроориентации телескопа | 1976 |
|
SU648954A1 |
| СИСТЕМА АСТРООРИЕНТАЦИИ И СЛЕЖЕНИЯ | 1971 |
|
SU428211A1 |
| Система астроориентации и стабилизации телескопа | 1978 |
|
SU769499A1 |
| Система управления телескопом | 1980 |
|
SU972479A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
| Система ориентации и стабилизации астрономического телескопа | 1989 |
|
SU1679466A1 |
| Способ астроинерциальной ориентации и устройство для его осуществления | 2022 |
|
RU2836748C2 |
| Фотоэлектрическая следящая система гидирования телескопа | 1984 |
|
SU1228068A1 |
| УСТРОЙСТВО ДЛЯ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ПАРАМЕТРОВ ОРИЕНТАЦИИ ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО КОРАБЛЯ | 2016 |
|
RU2650730C1 |
