1
Изобретение относится к системам автоматического управления положением объектов в пространстве.
Известные устройства аналогичного назначения, содержащие двухстепенный опорно-поворотный карданный подвес телескопа с приводами, установленные на телескопе астродатчики (гиды) в двухстепенных карданных подвесах с приводами, соединенными через управляющие блоки с управляющим пультом,
Однако в таких устройствах точность ориентации недостаточна, вследствие ошибок преобразования и влияния кинематических погрешностей подвесов.
Предложенное устройство отличается от известного тем, что в нем внешние оси двухстепенных опорно-поворотных карданных нодвесов астродатчиков установлены параллельно, а внутренние - перпендикулярно оптической оси телескопа.
Это повышает точность ориентации, так как исключаются кинематические погрешности и ошибки преобразования.
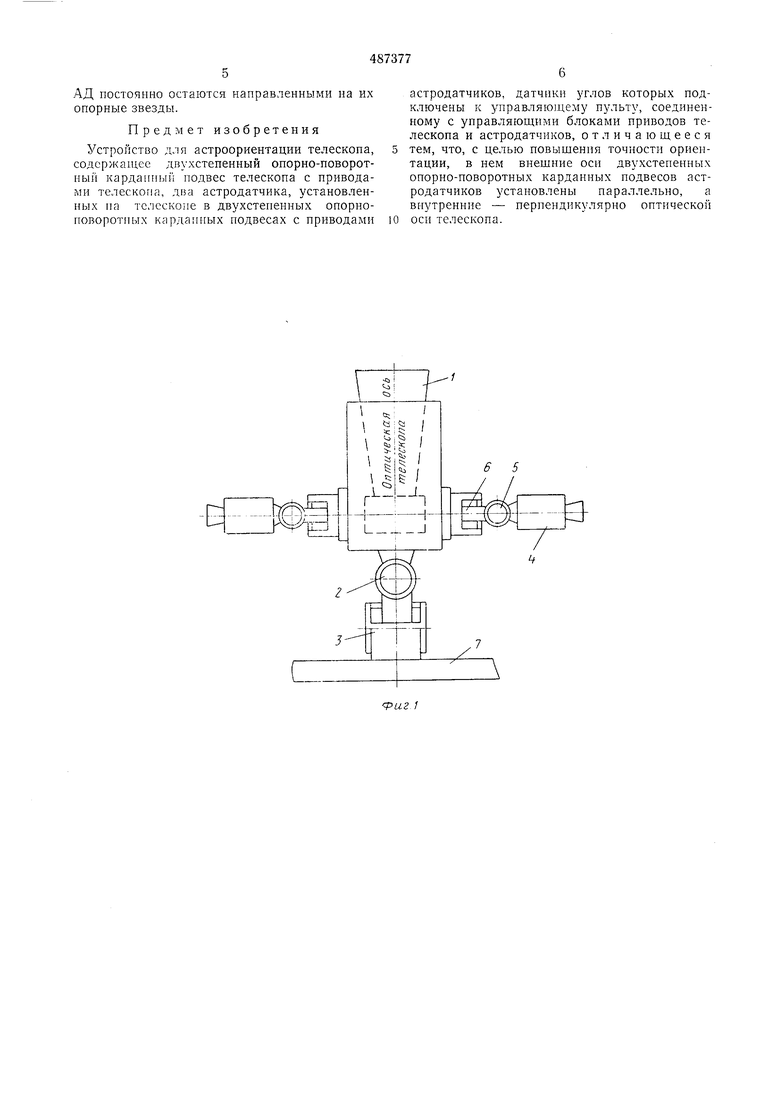
На фнг. 1 и 2 показано предложенное устройство.
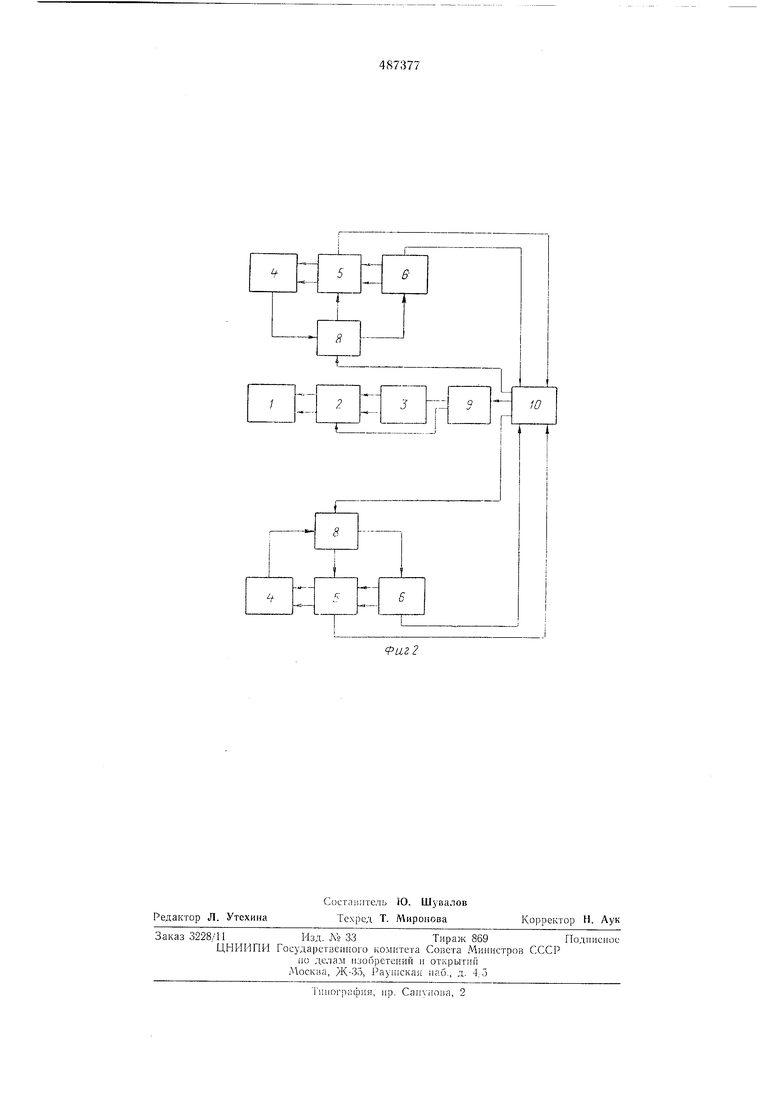
Устройство состоит из телескопа с несущей рамой 1, двух электромеханических ириводов 2 и 3 по осям двухстепенного опорно-поворотного карданного подвеса (ОПП) телескопа, двух астродатчиков (АД) 4 и четырех электромеханических приводов (по два па каждый АД) 5 и 6 по осям двухстепенных опорно-поворотных карданных подвесов (ОПП) АД. Привод 5 предназначен для поворота АД относительно телескопа вокруг внутренней оси ОПП АД, а привод 6 - для поворота АД вокруг внешней оси ОПП АД. Устройство установлено на подвижном основании 7.
Каждый электромеханический привод (2, 3, 5 и 6) состоит из исполнительного электродвигателя, механического понижающего редуктора с волновой передачей, датчиков обратных связей следящего привода по углу и по скорости и вспомогательных элементов, концевые выключатели, телеметрические датчики угла и др.), которые расиоложены в корпусе привода.
Кроме того в устройство входят управляющие блоки 8, 9, состоящ е каждый из двух управляющих усилителей, и управляющий пульт 10.
В пульте 10 расположены четыре четырехразрядных реверсивных счетчнка, представляющих в совокупности задатчик для набора командных значений углов, и преобразователь сигналов.
В устройстве использована специальная установка ОПП АД на раме телескопа, заключающаяся в том, что внешние оси ОПП АД параллельны, а внутренние оси периендиKy;iJtpiib (при нулевом положении АД в ОПП см. фиг. 1) оптической оси телескопа.
Прп таком расположении осей ОПП АД для управления телескопом требуется измерение не самих углов поворота АД в их ОПП, а только их приран.,еннй, и ие трех углов, а двух. Кроме того, при этом движение телескопа прекран1,ается только при нулевых приращениях углов поворота АД по внутренним осям их ОПП относительно командных значепи. При этом исключается систематическая погрешность ориентации телескопа при описанной выше специальной зстановке ОПП АД на раме телескопа.
Для измерения прираи1,ений углов исиользуаотся пары враш.ающихся трансформаторов (ВТ), включенных в трансформаторном режиме. Остальные преобразования производятся двумя синусно-косинусными прецизионными потенциометрами, установленными в задатчике пульта 10.
Устройство работает следуюш,им образом. Перед началом каждого сеанса работы выбирается объект наблюдения (ОП) и производится необходимая для выбранного ОН грубая трехосная начальная ориентация и стабилизация ПО 7. Номинальные параметры начальной ориентации ПО заранее рассчитываются для каждого ОН. Реализация требуе.мой ориентации ПО может производиться с достаточно большими погрешностями порядка 3-5 угловых градусов по каждой из трех осей ПО.
После выполнения ориентации ПО оператор включает питание устройства и набирает па пульте 10 командные значения углов (углов исходной ориентации) АД в их ОПП. Затем автоматически ориентируются оптические оси АД по внутренним и внешним осям их ОПП. Для этого переключатель режимов работы на пульте 10 ставят в соответствующее положение. При этом ВТ-приемники приводов 5 и 6 подключаются ко входам управляющих блоков 8, а выходы АД отключаются от входов блоков 8. Таким образом, формируются четыре следящих привода ориентации АД (по два на каждый АД). Эти приводы разворачивают АД по внутренним и внешним осям их ОПП на командные углы. По окончании двухосной уставки по командным углам АД «захватывают свои опорные звезды, что обеспечивается применением АД с достаточно широким полем зрения, перекрывающим возможные погрещности начальной ориентации и стабилизации основания 7. При этом система готова к работе в режиме астроориентации телескопа.
При переводе системы в режим астроориентации телескопа переключателем режимов на пульте 10 ВТ-приемники приводов 5 и 6 отключаются от входов усилителей блоков 8 и подключаются к преобразователю координат задатчика в управляющем пульте 10. ВЕЯХОЛЫ преобразователя координат подключаются ко
входам усилителей б.юка 9, выходы АД 4 - ко входам соответствую1цих усилителей блоков 8.
Таким образом, формируют шесть еледящих приводов, четыре из которых, управляемые сигналами рассогласования АД, регулируют относительное вращение АД в их ОПП так, чтобы оптические оси АД были строго направлеиы на соответствуюи1,ие опорные звезды при всех воз.люжных движениях телескопа. Дза других следяпи1х привода 2, 3, управляемых рассогласованиями ВТ-приемников приводов 5, регулируют относительное Браи1ение телескопа при всех возможных движениях ПО.
Если онтические оси АД с помощью собствеииых следящих ириводов точио направлены на оиорные звезды, а оптическая ось телескопа - на ОН, то рассогласования АД, ВТ-ириемников приводов 5 и управляющие напряжения на выходе преобразователя коордипат равны Н3лю и телескоп остается направленным на ОН. Если под действием возмущений, виосимых движением ПО, телескоп отклоняется ОТ направления на ОН, то оптические оси АД тоже отклоняются от направлений на свои опорные звезды, что порождает на выходах АД еигналы рассогласования, под действием которых АД поворачиваются в ОПП так, чтобы свести к нулю сигналы рассогласования па выходах АД. Поворот АД вызывает рассогласование между действительным угловым положением АД и ОПП и их командными значениями. Сигналы ВТ-приемников приводов 5 иостуиают в задатчик пульта 10, откуда после преобразования поступают в блок 9. Под действие.м управлярощих напряжений телескоп поворачивается в ОПП так, чтобы свести к нулю управляющие напряжения. Это вызывает умепьшение рассогласования АД и ВТ-приемпиков приводов 5.
Наличие стабилизации АД строго в направлении опорных звезд позволяет применить АД с узкими зонами линейности их статических характеристик и, как следствие, с высокой разрешаюгцей способностью, что увеличивает в целом разрешающую способность устройства.
Поля зрепия АД после «захвата ими опорных звезд и окончания переходных процессов в системе можно уменьшить с помощью электрически управляемых полевых диафрагм до малых размеров (порядка зон линейности АД), что резко увеличивает помехозащищенность АД и устройства в целом.
Переориентация телескопа производится без выключения режима астроориентации телескопа изменением иа пульте 10 показаний счетчиков, соответствующих взаимному расположению па небесной ефере нового ОН и прежних опорных звезд. Система сводит к нулю управляющие воздействия телескопа, возникшие вследствие изменения командных УГЛОВ при ориентации телескопа в новую точку пебесиой сферы. При этом оптические оси
АД постоянно остаются направленными на их опорные звезды.
Предмет изобретения
Устройство для астроориентации телескопа, содсржап 1,ее двухстепенный опорно-поворотный карданный подвес телескопа с приводами телескопа, два астродатчика, установленных на тслссколе в двухстепенных опорноповоротных карданных подвесах с приводами
астродатчиков, датчики углов которых подключены к управляющему пульту, соединенному с управляющими блоками приводов телескопа и астродатчиков, отличающееся тем, что, с целью повыщения точности ориентации, в нем внешние оси двухстепенных опорно-иоворотных карданных подвесов астродатчиков установлены параллельно, а внутренние - перпендикулярно онтической оси телескопа.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для астроориентации телескопа | 1975 |
|
SU697972A2 |
| Система для астроориентации телескопа | 1976 |
|
SU648954A1 |
| СИСТЕМА АСТРООРИЕНТАЦИИ И СЛЕЖЕНИЯ | 1971 |
|
SU428211A1 |
| Система ориентации и стабилизации астрономического телескопа | 1989 |
|
SU1679466A1 |
| Система управления телескопом | 1980 |
|
SU972479A1 |
| Система астроориентации и стабилизации телескопа | 1978 |
|
SU769499A1 |
| СТАБИЛИЗИРОВАННОЕ ТЕПЛОВИЗИОННОЕ УСТРОЙСТВО НАВЕДЕНИЯ | 1995 |
|
RU2099750C1 |
| Система астроориентации орбитального космического аппарата с обратными связями | 2023 |
|
RU2812876C1 |
| КОСМИЧЕСКАЯ ОПТИЧЕСКАЯ ЛИНИЯ СВЯЗИ МЕЖДУ ДВУМЯ ОБЪЕКТАМИ | 1997 |
|
RU2106749C1 |
| Фотоэлектрическая следящая система гидирования телескопа | 1984 |
|
SU1228068A1 |
LH
