Изобретение относится к локационной технике и предназначено для использования в системах сопровождения подвижных объектов и системах наведения ракет.
Известен способ оценки параметров траектории объекта, включающий измерение координат объекта, определение скоростей изменения его координат, формирование параметров движения объекта и сглаживание параметров движения объекта ([1] Л.Н. Преснухин, Л.А. Соломонов и др. Основы теории и проектирования вычислительных приборов и машин управления. М.: Высшая школа, 1970, стр. 112-120, стр. 169-190).
Такой способ оценки параметров траектории (параметров движения) объекта основан на сглаживании измерений координат фиксированной выборки, изменение которых заранее задают аппроксимирующим полиномом определенного порядка. Порядок аппроксимирующего полинома выбирают исходя из принятого закона (гипотезы) движения объекта. При фиксированном порядке полинома чем больше интервал сглаживания (длина выборки), тем в большей степени уменьшается влияние случайных ошибок измерений, но при этом увеличивается методическая ошибка аппроксимации (оценки) траектории. Если же увеличивать порядок аппроксимирующего полинома, то методическая ошибка в результате сглаживания уменьшается, а случайная ошибка оценивания возрастает. Другой принципиальной особенностью такого способа оценки параметров траектории является то, что сглаженные параметры движения объекта в каждой точке интервала имеют динамическое запаздывание относительно измеренных координат. Поэтому известный способ в условиях случайных ошибок измерения координат и переменных во времени параметров движения объекта обеспечивает низкую точность оценки параметров траектории, особенно в реальном времени сопровождения объекта.
Известен способ оценки параметров траектории объекта, основанный на оценивании состояния объекта как динамической системы, изменения которой задают математической моделью движения объекта, а процесс измерения координат характеризуют статистической дисперсией ошибок их измерения. Этот способ оценивания включает использование так называемого фильтра Калмана, обеспечивающего получение с минимальной дисперсией оценки вектора состояния (т.е. параметров траектории движения) объекта и корреляционной матрицы ошибок этой оценки по текущим измерениям наблюдаемых координат объекта ([2] Б.Ф. Жданюк. Основы статистической обработки траекторных измерений. - М.: Советское радио, 1978, стр. 87-97).
Наиболее близким к предлагаемому является способ оценки параметров траектории объекта, основанный на измерении координат объекта, преобразовании их в прямоугольные координаты и использовании для оценки параметров траектории объекта фильтра Калмана, включающего последовательные экстраполяцию параметров траектории, формирование сигналов ошибок оценки координат как разностей между соответствующими текущими измеренными и экстраполированными координатами объекта, вычисление корреляционных матриц ошибок экстраполяции и ошибок оценивания параметров траектории, определение с учетом корреляционной матрицы ошибок экстраполяции параметров траектории матричного коэффициента усиления фильтра и формирование по каждой прямоугольной координате оценок параметров траектории объекта как суммы соответствующих текущих экстраполированных параметров траектории и взвешенного в соответствии с матричным коэффициентом усиления фильтра сигнала ошибки оценки координаты объекта ([3] С.З. Кузьмин. Основы проектирования систем цифровой обработки радиолокационной информации. - М.: Радио и связь, 1986, стр. 160-164).
Известный способ основан на последовательном, после каждого нового измерения координат, уточнении параметров траектории объекта в соответствии с принятой моделью его движения, задаваемой матрицей экстраполяци параметров траектории, и позволяет обеспечить получение оптимальных оценок параметров траектории в реальном времени оценивания.
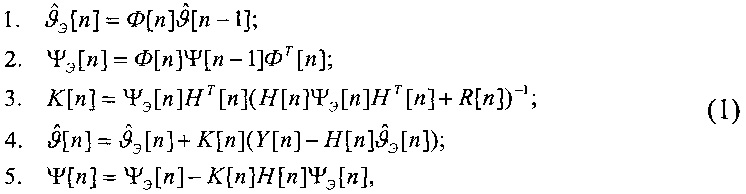
Соотношения, определяющие совместные и взаимосвязанные операции динамической экстраполяции и оценивания параметров движения фильтра Калмана, в общем случае имеют вид ([3], стр. 163)
где  - вектор экстраполированных параметров траектории;
- вектор экстраполированных параметров траектории;
Ф[n] - матрица экстраполяции;
 - вектор оценок параметров траектории;
- вектор оценок параметров траектории;
ΨЭ[n] - корреляционная матрица ошибок экстраполяции;
Ψ[n] - корреляционная матрица ошибок оценивания;
K[n] - матричный коэффициент усиления;
H[n] - матрица измерения (наблюдения);
Y[n] - вектор измеренных координат;
R[n] - корреляционная матрица ошибок измерения координат;
n - текущий номер дискретного шага по времени оценивания, n=1, 2, 3, … .
В соотношении (1) уравнение 1 представляет уравнение экстраполяции параметров траектории, уравнение 2 - выражение для вычисления корреляционной матрицы ошибок экстраполяции, уравнение 3 - выражение для определения коэффициента усиления фильтра, уравнение 4 - уравнение оценивания параметров траектории, уравнение 5 - выражение для вычисления корреляционной матрицы ошибок оценивания.
При таком способе оценки параметров траектории размерность вектора оцениваемых параметров траектории и структуру фильтра Калмана задают заранее, на этапе проектирования, исходя из априорно принятых модели траектории движения сопровождаемого объекта и ошибок измерения его координат. Так, при задании модели траектории с вектором состояния параметров движения в виде трехмерного вектора по каждой прямоугольной координате, например, для координаты x

его компоненты (параметры траектории) имеют смысл координаты x[n], скорости изменения координаты  и ускорения по координате
и ускорения по координате  . В соответствии с такой моделью движения объекта матрица экстраполяции координат Ф[n] имеет вид
. В соответствии с такой моделью движения объекта матрица экстраполяции координат Ф[n] имеет вид
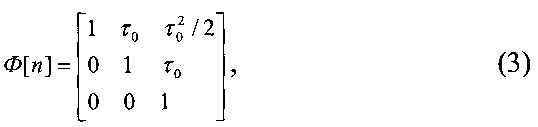
здесь τ0 - период (темп) измерения координат объекта (оценки параметров), а корреляционная матрица ошибок измерения координат R[n] задается как

где  - дисперсия ошибки измерения координат.
- дисперсия ошибки измерения координат.
В известном способе оценки параметров траектории не в полной мере учитываются конкретные реальные условия сопровождения объекта: возможные непредвиденные эволюции в его движении, приводящие к резким изменениям параметров движения (например, обусловленные маневром), а также возможные изменения величины ошибок измерения координат (в зависимости от дальности до объекта, его отражающих свойств, метеоусловий и т.п.). Несоответствие априори принятых в структуре фильтра модели траектории объекта и ошибок измерения координат (задаются в уравнениях (1) матрицы Ф[n], R[n], определяющие корреляционные матрицы ошибок оценивания Ψ[n], ошибок экстраполяции ΨЭ[n] и матричный коэффициент усиления K[n]) характеру реального изменения оцениваемых параметров траектории приводит (счет искаженного вычисления коэффициента K[n]) к динамическим ошибкам оценивания, которые существенно снижают точность оценок, а в случае преднамеренных маневров объекта, вероятность которых непредсказуема, вызывают даже срыв процесса оценивания. Указанные обстоятельства и определяют недостатки известного способа оценки параметров траектории объекта.
Задачей предлагаемого изобретения является повышение точности оценки параметров траектории сопровождаемого объекта в условиях неопределенности динамики его движения.
Поставленная задача решается тем, что в способе оценки параметров траектории объекта, основанном на измерении координат объекта, преобразовании их в прямоугольные координаты и использовании для оценки параметров траектории объекта фильтра Калмана, включающего последовательные экстраполяцию параметров траектории, формирование сигналов ошибок оценки координат как разностей между соответствующими текущими измеренными и экстраполированными координатами объекта, вычисление корреляционных матриц ошибок экстраполяции и ошибок оценивания параметров траектории, определение с учетом корреляционной матрицы ошибок экстраполяции параметров траектории матричного коэффициента усиления фильтра и формирование по каждой прямоугольной координате оценок параметров траектории объекта как суммы соответствующих текущих экстраполированных параметров траектории и взвешенного в соответствии с матричным коэффициентом усиления фильтра сигнала ошибки оценки координаты, новым является то, что заранее устанавливают контролируемый параметр фильтра Калмана и задают его пороговое значение, в текущем времени оценивания умножают корреляционную матрицу ошибок экстраполяции на весовой коэффициент с начальным значением, равным единице, накапливают значение контролируемого параметра, сравнивают текущее накопленное значение контролируемого параметра фильтра с его пороговым значением, и если накопленное значение контролируемого параметра больше порогового значения, то формируют признак "Маневр", обнуляют накопленное значение контролируемого параметра, а текущее значение весового коэффициента дискретно увеличивают и далее продолжают накопление контролируемого параметра и формирование оценок параметров траектории объекта, при этом, если при наличии признака "Маневр" текущее накопленное значение контролируемого параметра станет меньше порогового значения, то признак "Маневр" снимают, обнуляют накопленное значение контролируемого параметра, а текущее значение весового коэффициента дискретно уменьшают и далее продолжают накопление контролируемого параметра и формирование оценок параметров траектории объекта.
В предлагаемом способе оценки параметров траектории объекта в качестве контролируемого параметра используют сигнал модуля ускорения, определяемого оценками вторых производных соответствующих прямоугольных координат объекта, а его накопление осуществляют запоминанием текущих значений на заданном интервале времени оценивания параметров траектории.
В предлагаемом способе оценки параметров траектории объекта в качестве контролируемого параметра используют по каждой прямоугольной координате сигнал модуля ошибки оценки соответствующей координаты, а его накопление осуществляют интегрированием текущих значений на заданном интервале времени оценивания параметров траектории.
В предлагаемом способе оценки параметров траектории объекта значение весового коэффициента изменяют в пределах заданного диапазона, границы которого задают из условия обеспечения допустимых значений флуктуационной и динамической составляющих ошибки оценки параметров траектории объекта.
Введение новых операций и их связей позволило по сравнению с известным способом повысить точность оценки параметров траектории объекта, особенно при сопровождении динамичных объектов при интенсивных шумах измерения их координат.
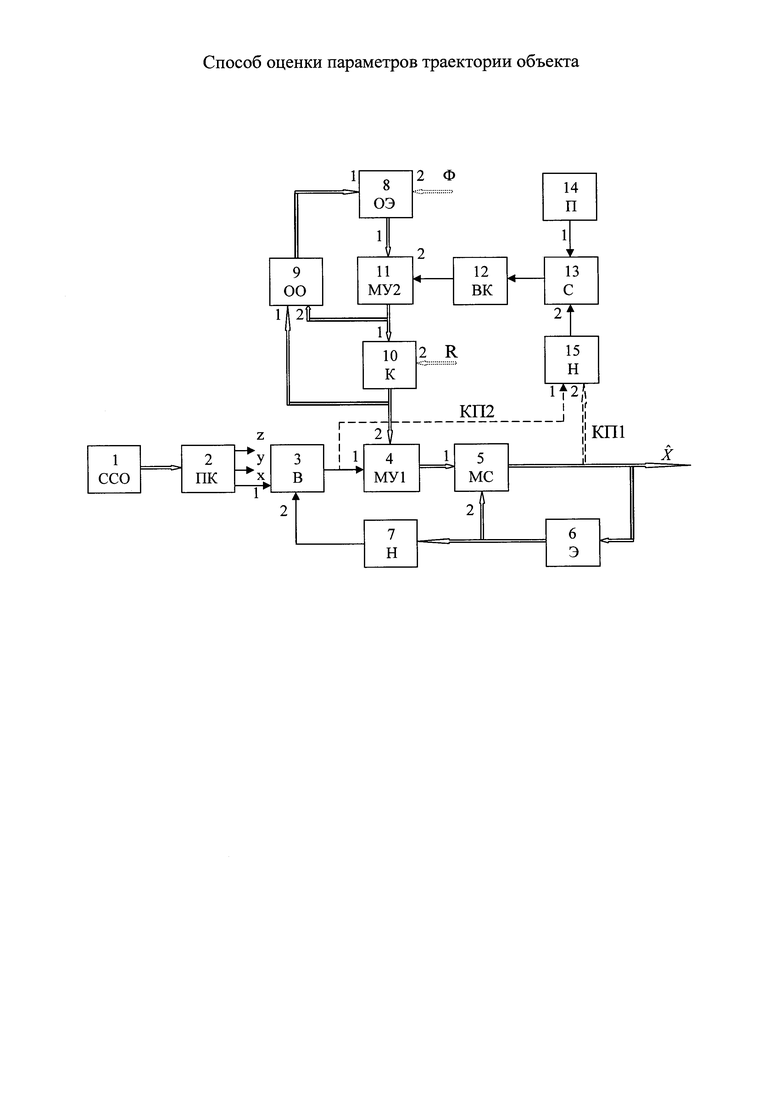
Схема, поясняющая предлагаемый способ оценки параметров траектории объекта, представлена на чертеже, на котором обозначено:
1 - система сопровождения объекта (ССО);
2 - преобразователь координат (ПК);
3 - вычитатель (В);
4, 11 - матричные усилители (МУ1, МУ2);
5 - матричный сумматор (МС);
6 - блок экстраполяции параметров траектории (Э);
7 - блок измеряемой (наблюдаемой) координаты (Н);
8 - вычислитель матрицы ошибок экстраполяции параметров траектории (ОЭ);
9 - вычислитель матрицы ошибок оценивания параметров траектории (ОО);
10 - вычислитель матричного коэффициента усиления (К);
12 - блок формирования весового коэффициента (ВК);
13 - блок сравнения (С);
14 - блок порогового значения (П);
15 - блок накопления контролируемого параметра (Н);
КП1 - связь при контролируемом параметре фильтра в виде сигнала модуля ускорения;
КП2 - связь при контролируемом параметре фильтра в виде сигнала ошибки оценки координаты;
R - корреляционная матрица ошибок измерения координат;
Ф - матрица экстраполяции параметров движения объекта;
х, у, z - прямоугольные координаты объекта;
 - вектор оценок параметров траектории (на примере координаты х).
- вектор оценок параметров траектории (на примере координаты х).
На чертеже двойные стрелки обозначают векторные (многомерные) связи, одинарные стрелки - скалярные связи (одномерные).
Способ оценки параметров траектории объекта заключается в следующем.
Предварительно, заранее, из фазовых координат фильтра Калмана устанавливают (назначают) контролируемый параметр. В качестве такого параметра приняты сигнал модуля ускорения, определяемый оценками вторых производных (ускорений)  соответствующих прямоугольных координат объекта (связь КП1 на чертеже)
соответствующих прямоугольных координат объекта (связь КП1 на чертеже)

или сигнал модуля ошибки оценки прямоугольной координаты  по каждой оцениваемой координате объекта (связь КП2 на чертеже), здесь
по каждой оцениваемой координате объекта (связь КП2 на чертеже), здесь

где х[n], у[n], z[n] - измеренные (т.е. полученные преобразованием измеренных сферических координат) прямоугольные координаты объекта;
xЭ[n], yЭ[n], zЭ[n] - экстраполированные прямоугольные координаты объекта.
Также устанавливают пороговое значение контролируемого параметра фильтра (блок 14). Величину порогового значения контролируемого параметра устанавливают такой, выше которой значение контролируемого параметра, как фазовой координаты фильтра Калмана, является недопустимым с точки зрения обеспечения требуемой точности оценки параметров траектории. При использовании в качестве контролируемого параметра сигнала модуля ускорения (5) пороговое значение U1ПОР задают равным предполагаемому ускорению маневра объекта, при котором при принятой модели движения объекта (матрице экстраполяции координат Ф[n]) возникающая динамическая ошибка оценки ускорения еще допустима с точки зрения требования к точности оценивания параметров траектории объекта. При использовании в качестве контролируемого параметра сигнала модуля ошибки оценки координаты (6) пороговое значение U2ПОР задают равным предполагаемой динамической ошибке оценки координаты, при которой при принятой модели движения объекта (матрице экстраполяции координат Ф[n]) ошибка оценки координаты еще допустима с точки зрения требования к точности оценивания параметров траектории.
В процессе сопровождения объекта (устройство 1) измеряют сферические координаты объекта - угол места ε[n], азимут β[n] и дальность Д[n], которые далее преобразуют (блок ПК) в прямоугольные координаты х[n], y[n], z[n] в соответствии с соотношениями ([1], стр. 30).

Затем осуществляют оценку текущих параметров траектории объекта, под которыми понимаются фильтрованные прямоугольные координаты объекта  и их первые
и их первые  , вторые
, вторые  и т.д. производные, получаемые по результатам обработки прямоугольных координат объекта x[n], у[n], z[n]. Оценку параметров траектории проводят посредством использования фильтра Калмана, определяемого соотношениями (1). Структура фильтра содержит в качестве своей составной части математическую модель траектории объекта (модель оцениваемого процесса движения), которая задается матрицей экстраполяции координат Ф[n]. Свойства фильтра определяются используемой моделью траектории и коэффициентом усиления (фильтрации), значение которого определяется также принятыми ошибками измерения координат сопровождаемого объекта.
и т.д. производные, получаемые по результатам обработки прямоугольных координат объекта x[n], у[n], z[n]. Оценку параметров траектории проводят посредством использования фильтра Калмана, определяемого соотношениями (1). Структура фильтра содержит в качестве своей составной части математическую модель траектории объекта (модель оцениваемого процесса движения), которая задается матрицей экстраполяции координат Ф[n]. Свойства фильтра определяются используемой моделью траектории и коэффициентом усиления (фильтрации), значение которого определяется также принятыми ошибками измерения координат сопровождаемого объекта.
При задании модели траектории движения объекта трехмерным вектором состояния параметров движения в виде (2) с матрицей экстраполяции в виде (3) оцениваемыми параметрами будут прямоугольные координаты, скорости и ускорения объекта. В таком случае соотношения экстраполяции текущих параметров траектории xЭ[n], yЭ[n], zЭ[n] имеют вид (записано для одной координаты, например для координаты x)
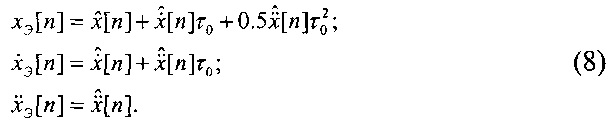
В соответствии с соотношениями (8) проводят (блок 6) экстраполяцию параметров траектории и далее формируют сигналы ошибок оценки координат как разностей между соответствующими текущими измеренными координатами объекта и экстраполированными координатами в соответствии с соотношениями (6). В данном случае измеренными координатами являются прямоугольные координаты траектории х[n], у[n], z[n], что определяется (блок измерений 7) видом матрицы измерения (наблюдения) H[n]

Затем формируют (блоки 4, 5) по каждой прямоугольной координате оценки параметров траектории объекта как суммы соответствующих экстраполированных координат xЭ[n], уЭ[n], zЭ[n] и взвешенных в соответствии с коэффициентом усиления фильтра K[n] сигналов ошибок оценивания координат Δх[n], Δу[n], Δz[n] в соответствии с уравнением 4 соотношения (1), которое при трехмерном векторе состояния параметров траектории (например, для координаты х) запишется в виде

где k1[n], k2[n], k3[n] - коэффициенты усиления фильтра по соответствующим параметрам траектории, составляющие матричный коэффициент усиления

Коэффициент усиления K[n] (составляющие k1[n], k2[n], k3[n]) определяют (блок 10) в текущем времени оценки траектории в соответствии с уравнением 3 соотношения (1) по текущим значениям корреляционной матрицы ошибок экстраполяции ΨЭ[n] (блок 8), которую умножают на весовой коэффициент KB[n] с начальным значением, равным единице (блок 11), и корреляционной матрицы ошибок измерения координат R[n]. Корреляционная матрица ошибок экстраполяции ΨЭ[n] в свою очередь вычисляется с учетом корреляционной матрицы ошибок оценивания Ψ[n] (блок 9).
Применительно к трем оцениваемым параметрам траектории (координатам, скоростям и ускорениям) соотношения для определения коэффициентов усиления k1, k2, k3 имеют вид

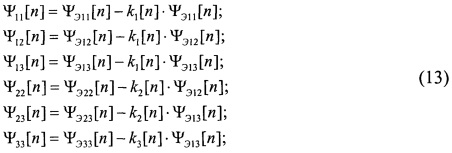
где ΨЭ11[n], ΨЭ12[n], ΨЭ13[n], ΨЭ22[n], ΨЭ23[n], ΨЭ33[n] - коэффициенты корреляции ошибок экстраполяции соответственно координаты (индекс «1»), первой (индекс «2») и второй (индекс «3») производных координаты;
Ψ11[n], Ψ12[n], Ψ13[n], Ψ22[n], Ψ23[n], Ψ33[n] - коэффициенты корреляции ошибок оценивания координаты, первой и второй производных координаты.
Дисперсия ошибки измерения координат объекта σИ2 является априорной величиной, характеризующей точность системы сопровождения, которую определяют предварительно статистически расчетным или экспериментальным путем для данной системы.
В процессе оценивания накапливают значения установленного контролируемого параметра фильтра (блок 15). В случае использования контролируемого параметра в виде сигнала модуля ускорения (5) накопление осуществляют запоминанием его текущих значений W[i] на заданном интервале времени оценивания параметров траектории, где i=1, …, k, k целое число. Длительность интервала накопления T1нак=kτ0 определяется предполагаемой динамикой сопровождаемого объекта, т.е. временем, в течение которого объект может сменить вид своего движения, например, прямолинейное движение сменить на маневрирование.
В случае использования контролируемого параметра в виде сигнала модуля ошибки оценки координаты по каждой оцениваемой координате накопление осуществляют интегрированием его текущих значений на заданном интервале времени оценивания параметров траектории, например, по соотношению

где IΔx[j] - накопленное значение контролируемого параметра, j=1, …, m, m - целое число.
Длительность интервала накопления T2нак=mτ0 также определяют исходя из предполагаемой динамики траектории сопровождаемого объекта.
Затем сравнивают (блок 13) текущее накопленное значение контролируемого параметра с его установленным пороговым значением (блок 14). Если при текущем сравнении значение накопленного контролируемого параметра больше порогового значения (W[i]>U1ПОР или IΔx[j]>U2ПОР), то формируют признак "Маневр", накопленное значение контролируемого параметра обнуляют, т.е. полагают

или 
а текущее значение весового коэффициента KB дискретно увеличивают (блок 12) в соответствии с соотношением

где KB[l] - предшествующее значение весового коэффициента, l=1, 2, …, причем начальное значение весового коэффициента заранее полагают равным единице, т.е. KB[0]=0;
Δ - дискрет изменения весового коэффициента,
и далее продолжают накопление контролируемого параметра и формирование оценок параметров траектории объекта.
Величину дискрета Δ весового коэффициента задают такой, чтобы переходной процесс в фильтре Калмана при изменении его коэффициента усиления (после "взвешивания" корреляционной матрицы ошибок экстраполяции ΨЭ[n] коэффициентом KB[n]) не оказывал существенное влияние на точность оценивания параметров траектории. Это обеспечивается при значении дискрета Δ, составляющим 5-10% от текущего значения весового коэффициента KB[n].
Превышение накопленного контролируемого параметра его порогового значения означает, что требуемая точность оценки параметров траектории из-за возникающей динамической ошибки фильтра не обеспечивается в силу несоответствия принятых моделей движения объекта и ошибок измерения его координат реальным процессам движения объекта и измерения координат и требуется корректировка параметров оценивающего фильтра.
После проведения корректировки весового коэффициента KB в соответствии с соотношением (19) текущее умножение ("взвешивание") корреляционной матрицы ошибок экстраполяции проводят (блок 11) уже на весовой коэффициент по величине большей единицы, т.е. корреляционную матрицу ошибок экстраполяции вычисляют по соотношению

что приводит соответственно к коррекции вычисления матричного коэффициента усиления фильтра K[n] (соотношение (1), уравнение 3), направленной на придание большего веса в оценке координат измерениям, стоящим ближе к текущему моменту времени. Такая проведенная корректировка обеспечивает адаптивное расширение полосы пропускания фильтра, что эквивалентно учету маневра объекта, а это в свою очередь уменьшает возникшую динамическую ошибку оценивания параметров траектории.
Далее, если при наличии сформированного признака "Маневр" текущее накопленное значение контролируемого параметра станет меньше порогового значения (W[i]<U1ПОР или IΔx[j]<U2ПОP), то признак "Маневр" снимают, обнуляют накопленное значение контролируемого параметра, а текущее значение весового коэффициента KB дискретно уменьшают в соответствии с соотношением

после чего продолжают накопление контролируемого параметра фильтра и формирование оценок параметров траектории объекта. Корректировка (20) весового коэффициента KB[n] уменьшает коэффициент взвешивания корреляционной матрицы ошибок экстраполяции ΨЭ[n], что приводит к коррекции вычисления матричного коэффициента усиления фильтра K[n], соответственно к сужению полосы пропускания фильтра и уменьшению случайной ошибки оценивания параметров траектории при обеспечении требуемой динамической ошибки оценивания.
Регулирование возможных значений весового коэффициента KB[n] осуществляют в определенном допустимом диапазоне, ограниченном максимальной KBmax и минимальной KBmin величинами (относительно 1), которые выбирают из условия обеспечения флуктуационной и динамической составляющих ошибок оценки параметров траектории объекта, не выходящих за допустимые значения.
Предлагаемая корректировка коэффициента усиления фильтра Калмана и соответственно параметров фильтрации и экстраполяции параметров движения с использованием адаптивного текущего весового коэффициента матрицы ошибок экстраполяции позволяет на основе измеренных данных учесть фактические сложившиеся точностные условия сопровождения объекта (а не только лишь априорные данные), что повышает точность оценивания параметров траектории движения объекта.
Предлагаемый способ оценки параметров траектории объекта реализуется известными штатными элементами радиолокационных устройств и вычислительной системой обработки информации и управления, принципы построения, состав, структура и алгоритм функционирования которой приведены в [3], стр. 223-292.
Таким образом, предлагаемое техническое решение обеспечивает повышение точности оценки параметров траектории сопровождаемого объекта в условиях неопределенности динамики его движения, что выгодно отличает этот способ от известных способов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АДАПТИВНОГО СОПРОВОЖДЕНИЯ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2679598C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ОБЪЕКТА И СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ЛУЧА ПРИЕМНО-ПЕРЕДАЮЩЕГО АНТЕННОГО УСТРОЙСТВА СИСТЕМЫ СОПРОВОЖДЕНИЯ ОБЪЕКТА | 2011 |
|
RU2476904C1 |
| Способ сопровождения крылатой ракеты при огибании рельефа местности в различных тактических ситуациях | 2021 |
|
RU2760951C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ ПО ИЗМЕРЕНИЯМ ИХ НЕСУЩЕЙ ЧАСТОТЫ | 2021 |
|
RU2776078C1 |
| СПОСОБ ТРАССОВОГО СОПРОВОЖДЕНИЯ ВОЗДУШНЫХ МАНЕВРИРУЮЩИХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ ПО ПЕЛЕНГОВОЙ ИНФОРМАЦИИ ОТ ОДНОПОЗИЦИОННОЙ СИСТЕМЫ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ ВОЗДУШНОГО БАЗИРОВАНИЯ | 2017 |
|
RU2660498C1 |
| СПОСОБ ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2536768C1 |
| АДАПТИВНЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2012 |
|
RU2492506C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩЕЙ ВОЗДУШНОЙ ЦЕЛИ | 1993 |
|
RU2048684C1 |
| УСТРОЙСТВО ОПТИМИЗАЦИИ ВЕСОВЫХ КОЭФФИЦИЕНТОВ СЛЕДЯЩЕЙ ФИЛЬТРАЦИИ | 2022 |
|
RU2805171C1 |
| СПОСОБ И УСТРОЙСТВО СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩИХ ЦЕЛЕЙ В ОБЗОРНОЙ ДОПЛЕРОВСКОЙ РЛС | 2023 |
|
RU2815305C1 |
Изобретение относится к локационной технике и предназначено для использования в системах сопровождения подвижных объектов и системах наведения ракет. Достигаемый технический результат - повышение точности оценки параметров траектории сопровождаемого объекта в условиях неопределенности динамики его движения. Указанный результат достигается за счет того, что способ оценки параметров траектории объекта основан на измерении координат объекта, преобразовании их в прямоугольные координаты и использовании для оценки параметров траектории объекта фильтра Калмана, при этом устанавливают контролируемый параметр фильтра Калмана и задают его пороговое значение, в текущем времени оценивания умножают корреляционную матрицу ошибок экстраполяции фильтра Калмана на весовой коэффициент с начальным значением, равным единице, накапливают значение контролируемого параметра, сравнивают накопленное значение контролируемого параметра с пороговым значением и если оно больше порогового значения, то формируют признак "Маневр", обнуляют накопленное значение контролируемого параметра, а значение весового коэффициента дискретно увеличивают и далее продолжают накопление контролируемого параметра и формирование оценок параметров траектории, при этом, если при наличии признака "Маневр" накопленное значение контролируемого параметра станет меньше порогового значения, то признак "Маневр" снимают, обнуляют накопленное значение контролируемого параметра, а значение весового коэффициента дискретно уменьшают и далее продолжают накопление контролируемого параметра и формирование оценок параметров траектории объекта. 3 з.п. ф-лы, 1 ил.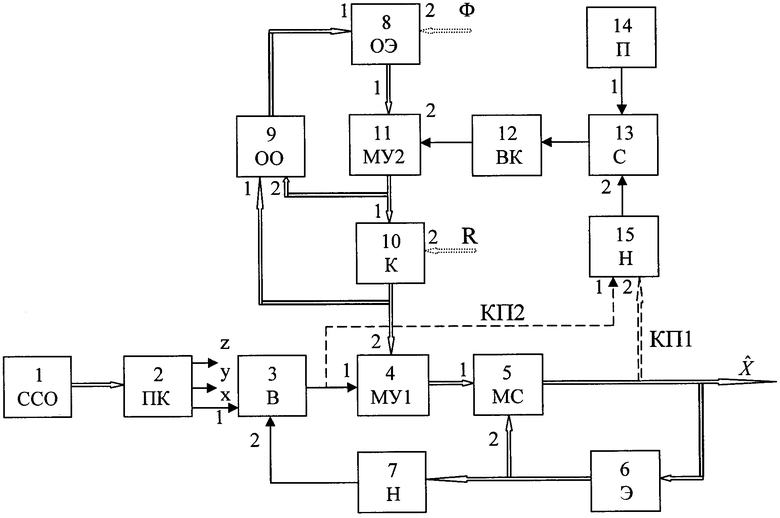
1. Способ оценки параметров траектории объекта, основанный на измерении координат объекта, преобразовании их в прямоугольные координаты и использовании для оценки параметров траектории объекта фильтра Калмана, включающего последовательные экстраполяцию параметров траектории, формирование сигналов ошибок оценки координат как разностей между соответствующими текущими измеренными и экстраполированными координатами объекта, вычисление корреляционных матриц ошибок экстраполяции и ошибок оценивания параметров траектории, определение с учетом корреляционной матрицы ошибок экстраполяции параметров траектории матричного коэффициента усиления фильтра и формирование по каждой прямоугольной координате оценок параметров траектории объекта как суммы соответствующих текущих экстраполированных параметров траектории и взвешенного в соответствии с матричным коэффициентом усиления фильтра сигнала ошибки оценки координаты, отличающийся тем, что заранее устанавливают контролируемый параметр фильтра Калмана и задают его пороговое значение, в текущем времени оценивания умножают корреляционную матрицу ошибок экстраполяции на весовой коэффициент с начальным значением, равным единице, накапливают значение контролируемого параметра, сравнивают текущее накопленное значение контролируемого параметра фильтра с его пороговым значением, и если накопленное значение контролируемого параметра больше порогового значения, то формируют признак "Маневр", обнуляют накопленное значение контролируемого параметра, а текущее значение весового коэффициента дискретно увеличивают и далее продолжают накопление контролируемого параметра и формирование оценок параметров траектории объекта, при этом, если при наличии признака "Маневр" текущее накопленное значение контролируемого параметра станет меньше порогового значения, то признак "Маневр" снимают, обнуляют накопленное значение контролируемого параметра, а текущее значение весового коэффициента дискретно уменьшают и далее продолжают накопление контролируемого параметра и формирование оценок параметров траектории объекта.
2. Способ по п. 1, отличающийся тем, что в качестве контролируемого параметра используют сигнал модуля ускорения, определяемого оценками вторых производных соответствующих прямоугольных координат объекта, а его накопление осуществляют запоминанием текущих значений на заданном интервале времени оценивания параметров траектории.
3. Способ по п. 1, отличающийся тем, что в качестве контролируемого параметра используют по каждой прямоугольной координате сигнал модуля ошибки оценки соответствующей координаты, а его накопление осуществляют интегрированием текущих значений на заданном интервале времени оценивания параметров траектории.
4. Способ по п. 1, отличающийся тем, что значение весового коэффициента изменяют в пределах заданного диапазона, границы которого задают из условия обеспечения допустимых значений флуктуационной и динамической составляющих ошибки оценки параметров траектории объекта.
| КУЗЬМИН С.З | |||
| Основы проектирования систем цифровой обработки радиолокационной информации | |||
| Москва, Радио и связь, 1986, с.160-164 | |||
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ СТАБИЛИЗАЦИИ И САМОНАВЕДЕНИЯ ПОДВИЖНОГО НОСИТЕЛЯ И БОРТОВАЯ СИСТЕМА САМОНАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2303229C1 |
| СПОСОБ ОЦЕНИВАНИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ В ДВУХПОЗИЦИОННОЙ УГЛОМЕРНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2003 |
|
RU2246121C9 |
| US 7187320 B1, 06.03.2007 | |||
| EP 1857831 A1, 21.11.2007 | |||
| WO 2004005961 A1, 15.01.2004. | |||

