1
Изобретение относится к устройствам для прецизионного автоматического позиционирования объектов, используемых в установках совмещения при производстве изделий микроэлектроники, в делительных машинах, металлорежущих станках с программным управлением и т. п.
Известно устройство для прецизионного автоматического позиционирования объектов, содержащее двигатель, на оси которого закреплен ротор датчика перемещений позиционного типа, кинематически связанный с кареткой, на которой расположен объект позиционирования, и электрически - с блоком управления.
Точность позиционирования в таком устройстве ограничивается возможностями механической передачи.
С целью повышения точности в устройстве дополнительно установлены обтюрациониый оптический датчик с растровой штриховой мерой и со штриховым индексом, каретка, датчик перемещений позиционного типа и двигатель, причем растровая штриховая мера и штриховой индекс обтюрациоиного датчика размещены соответственно иа каретке первого датчика перемещений и дополнительной каретке, кинематически связанной с валом дополнительного двигателя, на валу которого установлен ротор второго датчика перемещений
позиционного типа, который электрически связан с блоком управления.
На фиг. 1 схематично изображено предлагаемое устройство; на фиг. 2 - штриховой индекс, представляющий увеличенное изображение штриховой меры.
Устройство для прецизионного автоматического позиционирования объектов включает в себя каретку главного привода 1, гайку 2, винт 3, растровую штриховую меру 4, датчик перемещений позиционного типа с кодовым диском
5,двигатель главного привода 6, микрообъектив 7, штриховой индекс 8, дополнительный двигатель привода индекса 9, второйдатчик перемещений позиционного типа 10, фотоприемник 11, блок управления 12, осветитель 13, кодовые диски 14, 18, дополнительную каретку 15, винт привода индекса 16 и коллектив 17.
Блок главного привода содержит двигатель
6,винт 3 и гайку 2.
Команда на вывод системы на заданную координату подается блоком управления 12. Заданная координата равна
+ -,
п
где б - шаг штриховой меры; k и п - целые числа.
Главный привод выводит каретку в интервал k8: (ft+l)6 по сигналу от датчика 5.
Сигнал останова привода подается от оптического датчика в момент совпадения изображения штрихов штриховой меры 4 и индекса 8.
Для точного останова в точке с координатой
б+ - необходимо индекс сместить относип
ъ тельно начала отсчета на величину-w
п
(знак «- объясняется поворотом изображения в оптической системе).
Смеш,ение индекса 8 на величинуv
осуш,ествляется по команде от блока управления до начала движения главного привода.
Предмет изобретения
Устройство для препйзионного автоматического позиционирования объекта, содержащее двигатель, на оси которого закреплен ротор датчика перемеш;ений позиционного типа, кинематически связанный с кареткой, на которой расположен объект позиционирования, и электрически - с блоком управления, отличающееся тем, что, с целью повышения точности, в нем дополнительно установлены обтюрационный отпический датчик с растровой штриховой мерой и со штриховым индексом, каретка, датчик перемещений позиционного типа и двигатель, причем растровая штриховая мера и штриховой индекс обтюрационного датчика размещены соответственно на каретке первого датчика перемещений и дополнительной каретке, кинематически связанной с валом дополнительного двигателя, на валу которого установлен ротор второго датчика перемещений позиционного типа, который электрически связан с блоком управления.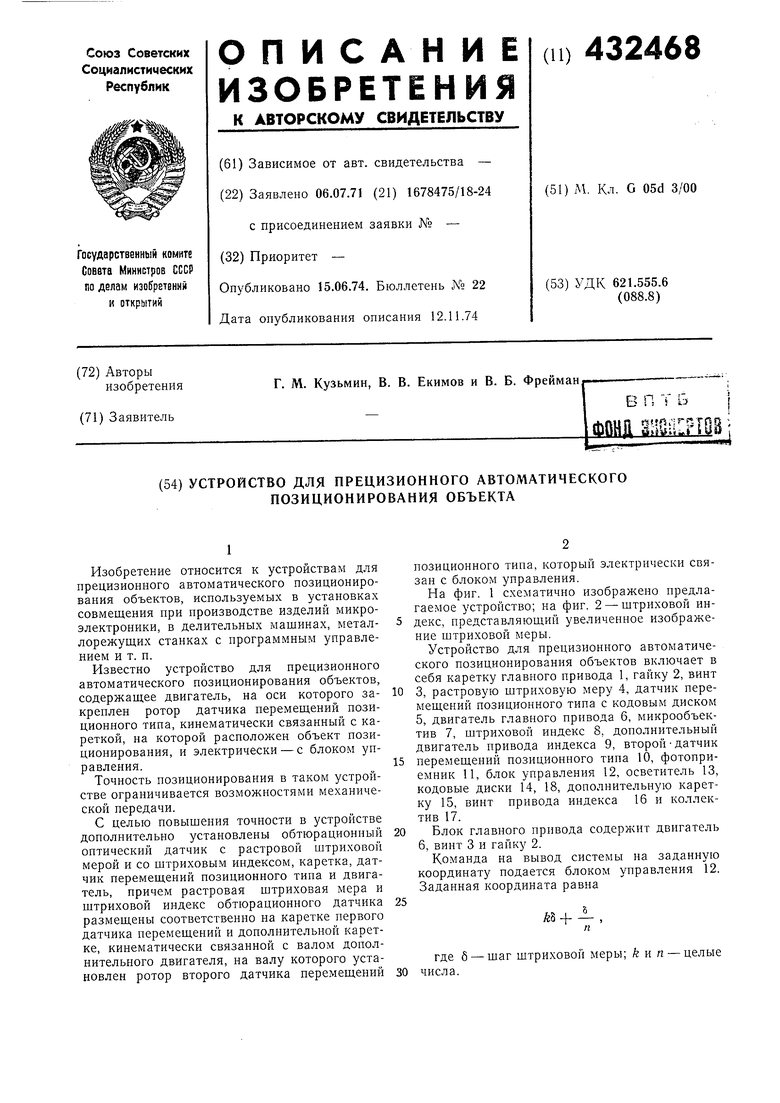
| название | год | авторы | номер документа |
|---|---|---|---|
| Струйная позиционная пневматическая система привода длинноходовых установочных координатных перемещений | 2023 |
|
RU2802568C1 |
| ПРЕЦИЗИОННЫЙ ПРИВОД ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2016 |
|
RU2644409C1 |
| УНИВЕРСАЛЬНО-РАСПРЕДЕЛЕННАЯ ГИБРИДНАЯ СИСТЕМА УПРАВЛЕНИЯ КОЛЛАБОРАТИВНЫМ МНОГОЦЕЛЕВЫМ РОБОТОМ С МАШИННЫМ ЗРЕНИЕМ | 2018 |
|
RU2710709C1 |
| Роботизированная хирургическая система транскатетерного протезирования клапана аорты | 2022 |
|
RU2789707C1 |
| МАГНИТОРЕОЛОГИЧЕСКАЯ ПОЗИЦИОНИРУЮЩАЯ И ВИБРОИЗОЛИРУЮЩАЯ СИСТЕМА | 2010 |
|
RU2443911C1 |
| Устройство автоматического управления приводами механизмов стана холодной прокатки труб | 1984 |
|
SU1210930A1 |
| Оптическое устройство для отсчета перемещений | 1972 |
|
SU417997A1 |
| Устройство для программного управления позиционированием | 1985 |
|
SU1267360A1 |
| Стенд для испытания интеллектуальной системы адаптивного управления процессом резания на металлорежущих станках со шпиндельным узлом с активными магнитными подшипниками | 2015 |
|
RU2690625C2 |
| РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ ТЕПЛОВОГО ДВИГАТЕЛЯ | 1993 |
|
RU2097593C1 |
