Изобретение с дистанционным манинуляторным устройствам с дистанционным управлением и может быть исиользовано при создании манипуляторов.
Известен захват дистанционного копирующего манипулятора, в котором губки задающего и исполнительного органов замкнуты обратной связью. Этот манипулятор характеризуется тем, что оператор не получает информации о достаточности усилия зажатия объекта манипулирования в губках исполнительного органа, а также тем, что он не исключает возможности выскальзывания объекта манипулирования из губок манипулятора.
Предлагаемый захват манипулятора отличается тем, что губки задающего органа снабжены имитатором нроскальзывания, управляемым установленным на губках исполнительного органа датчиком проскальзывания объекта манипулирования относительно губок исполнительного органа. Датчик выполнен, например, в виде обхваченных замкнутой гибкой лентой подпружиненных на губку роликов, один из которых соединен с тахогенератором обратной связи. Это повышает надежность манипулирования.
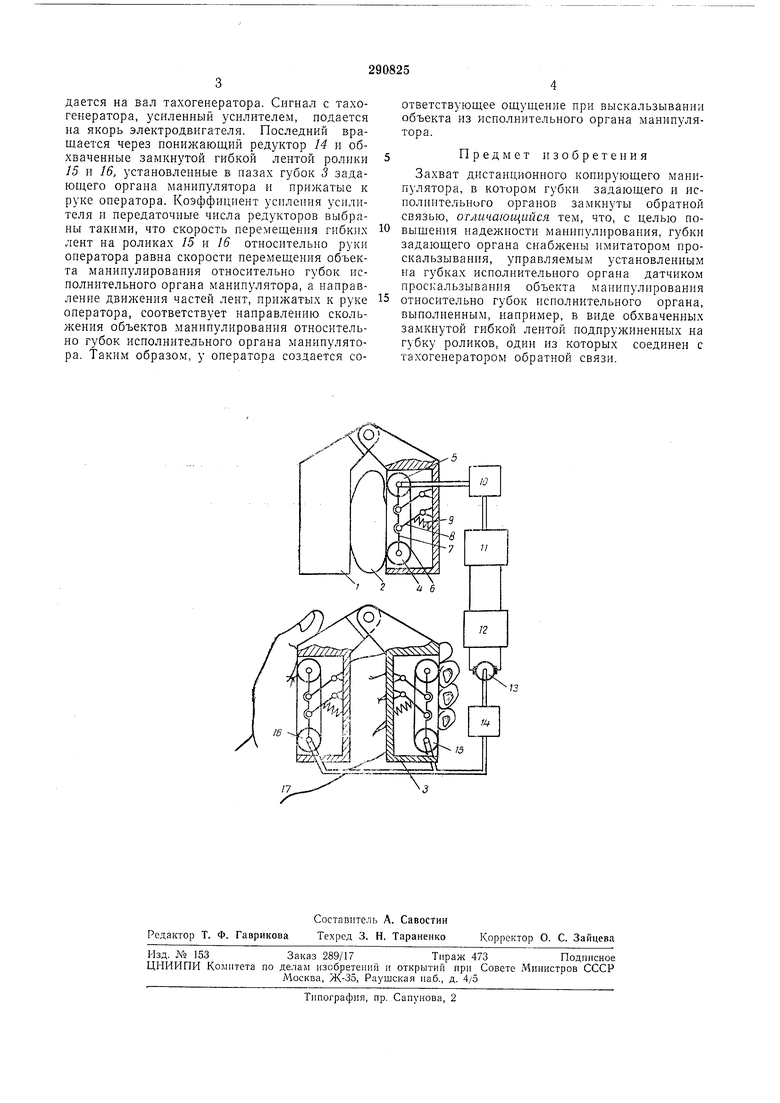
ся губками 3 задающего органа. В каждой губке 1 установлен датчик проскальзывания объекта манипулирования относительно губок исполнительного органа, состоящий из роликов 4 и 5, охваченных бесконечной гибкой лентой 6. Оси роликов закреплены на шатуне 7, связанном с губкой двумя звеньями 8, которые вместе с шатуном образуют шарнирный параллелограмм. Датчик поджимается к внутренней стороне губки 1 пружиной 9, установленной между стенкой губки / и одним из звеньев. 5 через повышающий редуктор 10 соедипен с валом тахогенератора //. Последний электрически соединен через усилитель 12 с якорем электродвигателя 13 постоянного тока. Вал электродвигателя через понижающий редуктор 14 соединен с ролнкамп 15 и 16 имитаторов проскальзывания объекта манипулирования, устройство которых аналогично устройству датчика проскальзывания. Имитаторы проскальзывания размещены в губках 3 задающего органа и поджимаются пруж нам11 к наружным сторонам губок 3, охватываемым рукой 17 оператора.
При перемещении зажатого в губках / исполнительного органа манипулятора объекта относительно губок начинают вращаться охваченные гибкой лентой ролики 4 и 5 датчика, прижатого к объекту пружиной. Вращение родается на вал тахогенератора. Сигнал с тахогенератора, усиленный усилителем, подается на якорь электродвигателя. Последний вращается через ионижающий редуктор 14 и обхваченные замкнутой гибкой лентой ролики 15 и 16, установленные в пазах губок 3 задающего органа манипулятора и прижатые к руке оператора. Коэффициент усиления усилителя и передаточные чнсла редукторов выбраны такими, что скорость иеремещеиия гибких лент на роликах 15 и 16 относительно руки оператора равна скорости перемещения объекта манипулирования относительно губок исполнительного органа манипулятора, а направление движения частей лент, прижатых к руке оператора, соответствует направлению скольжения объектов манипулирования относительно губок исполнительного органа маиипулятора. Таким образом, у оператора создается соответствующее ощущение при выскальзывании объекта из исполнительного органа манипулятора.
Предмет изобретения
Захват дистанционного копирующего манипулятора, в котором губки задающего и исполнительиого органов замкнуты обратной связью, отличающийся тем, что, с целью повыщения надежности манипулирования, губки задающего органа снабжены имитатором проскальзывания, уиравляемым установленным иа губках исполнительного органа датчиком проскальзывания объекта манипулирования
относительно губок исполнительного органа, выполненным, например, в виде обхваченных замкнутой гибкой лентой подпружиненных на губку роликов, один из которых соединен с тахогенератором обратной связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ МАНИПУЛЯТОРА | 1973 |
|
SU433023A1 |
| СХВАТ ЗАДАЮЩЕГО ОРГАНА МАНИПУЛЯТОРА | 1972 |
|
SU426804A1 |
| ВПТБ -г.|'1||?1 t*'?f^n^'"Tp.-.7 I | 1973 |
|
SU406718A1 |
| Устройство для управления схватом манипулятора | 1989 |
|
SU1754439A1 |
| Сустав задающего органа дистанционного копирующего манипулятора | 1972 |
|
SU444634A1 |
| МАНИПУЛЯТОР С ОСЯЗАТЕЛЬНЫМ ОЧУВСТВЛЕНИЕМ | 1969 |
|
SU234763A1 |
| СУСТАВ ЗАДАЮЩЕГО ОРГАНА ДИСТАНЦИОННОГО КОПИРУЮЩЕГО МАНИПУЛЯТОРА | 1970 |
|
SU278371A1 |
| Устройство для управления дистан-циОННыМ КОпиРующиМ МАНипуляТОРОМ | 1979 |
|
SU809048A1 |
| ДИСТАНЦИОННЫЙ КОНИРУЮ(ЦИЙ МАНИНУЛЯТОР | 1972 |
|
SU330950A1 |
| ДИСТАНЦИОННЫЙ МАНИПУЛЯТОР | 1973 |
|
SU398386A1 |
