1
Изобретение относится к устройствам для переработки проволоки.
Известен автомат для отрезки и гибки проволочных деталей, содержащий смонтированные )на Сталине НО ходу технолопотеского процесса держатель для катушки с проволокой, устройство для сматывания и подачи проволоки, расположенные но оси разматываемой нроволоки и установленные на подвижных осях две гибочные онравки, кинематически связанные Между собой и несущие на двух одноименных торцах кулачки, а также гибочные пальцы и -механизм резки проволоки.
Для повышения качества изготовляемых изделий предлагаемый автомат снабжен жестко закрепленными на одном из концов осей онравки взаимодействующими с упомяпутыми кулачками дополнительными ноднружиненными кулачками, при этом гибочные пальцы неподвижно соединены с осями и размещены на противонолож.ных относительно кулачков концах осей.
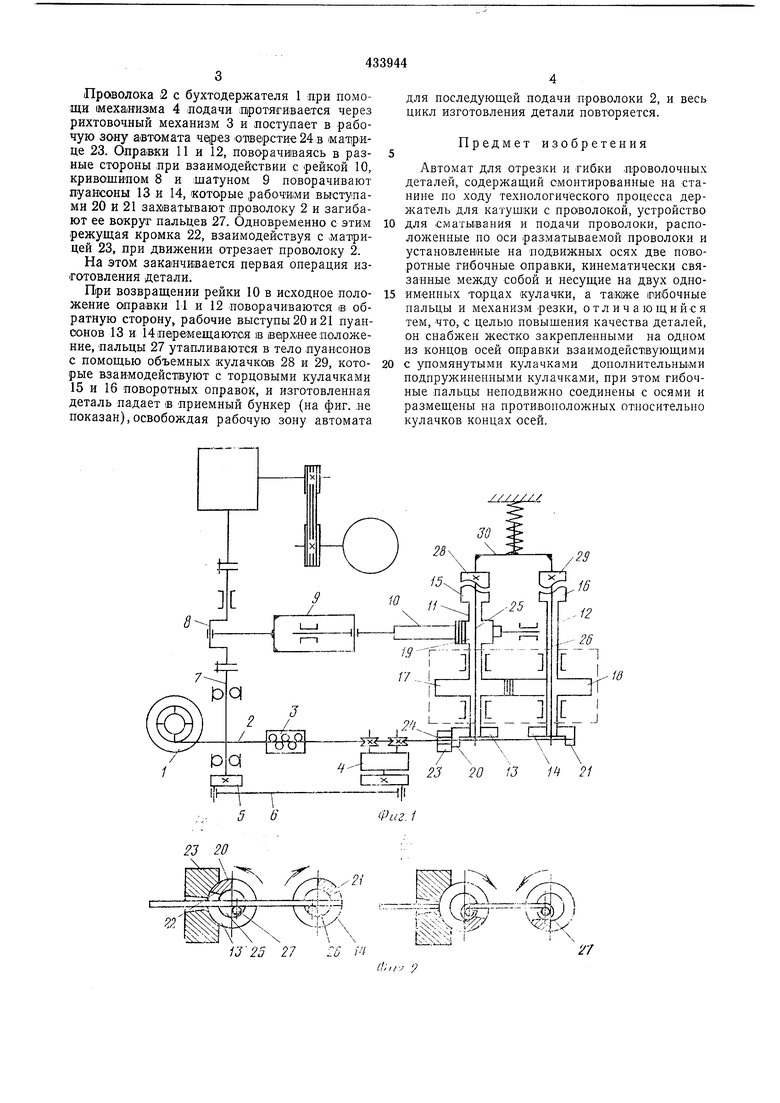
На фиг. 1 приведена принципиальная кинематическая схема нредлагаемого автомата; на фиг. 2 - механизм гибки.
Все составные части автомата расположены на столе, выполненном в виде сварного каркаса (на фиг. не показан). В верхней части стола расноложены бухтодержатель 1 с проволокой 2, механизм 3 для |рихтовки проволоки и механизм 4 подачи проволоки с приводом от кривошипа 5 через шатун 6. Величина нодачи проволоки регулируется эксцентриситетом кривошина 5. Приводной вал 7 через крнвошип 8 и шатун 9 сообщает возвратно-поступательное движение зубчатой рейке 10. Оправки 11 и 12 представляют собой полые валы, на одном конце которых крепятся пуансоны 13 и 14, а
на другом - торцовые кулачки 15 и 16. Онравки имеют зубчатые венцы il7 и 18, посредством которых они взаимодействуют между собой. Оправка И имеет зубчатый венец 19, который входит в зацепление с зубчатой рейкой 10.
Пуансоны 13 и 14 имеют рабочие выступы 20 и 21 для загиба детали, причем рабочий выступ 20 снабжен режущей кромкой 22, которая, взаимодействуя с матрицей 23, отрезает нроволоку 2. Для прохода проволоки матрица 23 имеет сквозное отверстие 24. Оправки 11 и 12 поворачиваются на осях 25 и 26, па которых па одном конце с торцовой стороны эксцент рично зацрессованы пальцы 27, вокруг которых осуществляется загибка проволоки 2. На
другом конце осей жестко закреплены объемные кулачки 28 и 29, котарые взаимодействуют с торцовыми кулачками 15 и 16 поворотных оправок. Концы осей жестко соединены подпружиненной скобой 30.
Автомат работает следующим образом.
Проволока 2 с бухтодержателя 1 при помощи механизма 4 лодачи ;П)ротягивается через рихтовочлый механизм 3 и поступает в рабочую зону автомата че|рез отверстие 24 в матр-нце 23. OnpaiBKH 11 и 12, поворачиваясь в разные стороиы лри взаимодействии с рейкой 10, кривошипом 8 и шатуном 9 поворачивают пуашоны 13 и 14, которые рабочими выступами 20 и 21 заХ1ватывают проволоку 2 и загибают ее вокруг пальцев 27. Одновременно с этим режущая кромка 22, взаимодействуя с матрицей 23, при движении отрезает проволоку 2.
На этом закаичЕвается первая операция изготовления детали.
При возвращении рейки 10 в исходное положение опра1вки 11 и 12 поворачиваются в обратную сторону, рабочие выступы 20 и 21 пуансонов 13 к 14 перемещаются IB верхнее положение, пальцы 27 утапливаются в тело пуансонов с помощью объемных кулачкав 28 и 29, которые взаимодействуют с торцовыми кулачками 15 и 16 поворотных оправок, и изготовленная деталь падает в приемный бункер (на фиг. .не показан), освобождая рабочую зону автомата
для последующей подачи проволоки 2, и весь пикл изготовления детали повторяется.
Предмет изобретения
Автомат для отрезки и гибки проволочных деталей, содержащий смонтированные на станине по ходу технологического процесса держатель для катушки с пр01волокой, устройство
для сматывания и подачи проволоки, расположенные по оси разматываемой проволоки и установленные на подвижных осях две поворотные гибочные оправки, кинематически связапные между собой и несущие на двух одноименных торцах кулачки, а та1кже шибочные пальцы и механизм резки, отличающийся тем, что, с целью повышения качества деталей, он снабжен жестко закрепленными на одном из концов осей оправки взаимодействующими
с упомянутыми кулачками дополнительными подпружиненными кулачками, при этом гибочные пальцы неподвижно соединены с осями и размещены на противоположных относительно кулачков концах осей.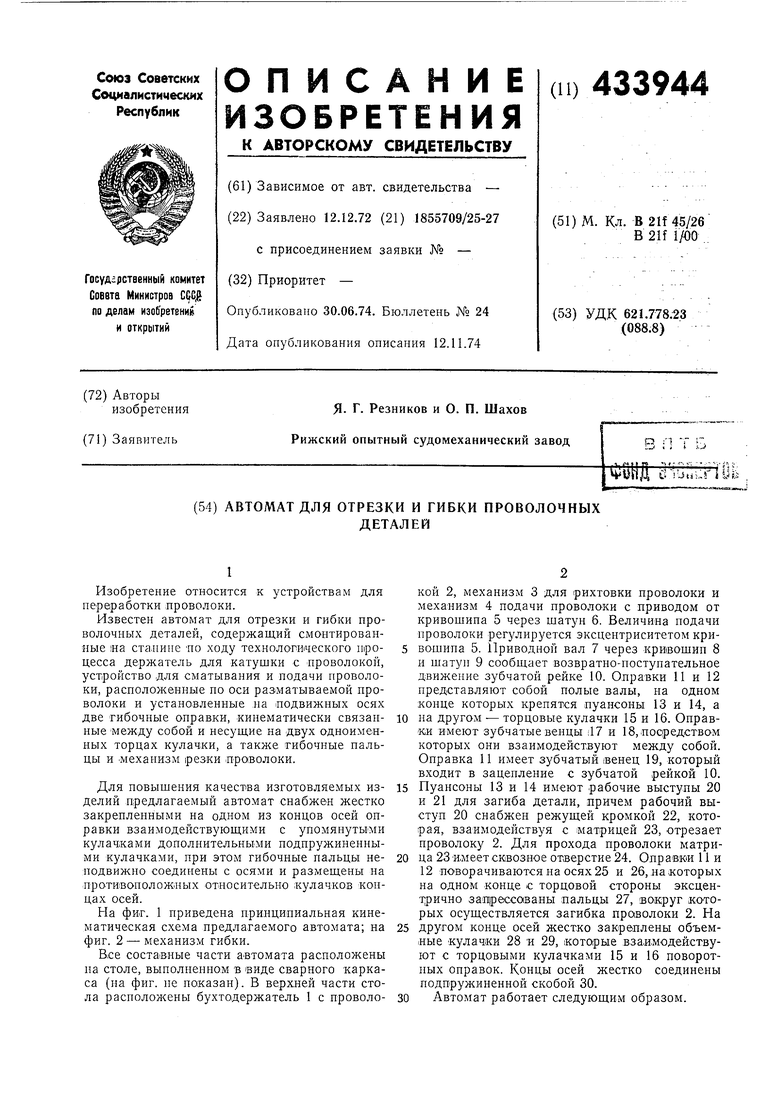
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для отрезки и гибки проволочных деталей | 1960 |
|
SU136301A1 |
| Автомат для отрезки и гибки проволочных деталей | 1979 |
|
SU874246A1 |
| Гибочно-отрезной автомат для изготовления проволочных изделий | 1984 |
|
SU1414493A1 |
| Гибочно-отрезной автомат для изготовления проволочных деталей | 1984 |
|
SU1232346A1 |
| Автомат для изготовления изделий из проволоки типа шплинтов | 1982 |
|
SU1093380A1 |
| Автомат для изготовления деталей из проволоки | 1991 |
|
SU1787630A1 |
| Цепевязальный автомат | 1990 |
|
SU1776198A3 |
| УСТРОЙСТВО ДЛЯ НАВИВКИ ПРУЖИН с ДВУМЯ ВЕТВЯМИ ПРОТИВОПОЛОЖНОГО НАПРАВЛЕНИЯ | 1971 |
|
SU424644A1 |
| Автомат для изготовления деталей сложной конфигурации из проволоки | 1983 |
|
SU1105266A1 |
| Автомат для изготовления двух ветвевых пружин с отогнутыми концами | 1989 |
|
SU1657263A1 |
