1
Изобретение относится к системам с бесконтактными электродвигателями постоянного тока и может использоваться для коррекции следящих систем, сервомеханизмов и т. п.
Известны бесконтактные следящие системы постоянного тока, содержащие последовательно соединенные элемент сравнения, усилитель, первый выпрямитель, сумматор, широтноимпульсный модулятор и бесконтактный двигатель постоянного тока, который через редуктор соединен со входом элемента сравнения, а также реле реверса, вход которого подключен к выходу усилителя, а выход - к бесконтактному двигателю постоянного тока, на валу которого установлен синхронный тахогенератор.
Недостатком известных следящих систем постоянного тока является малый коэффициент передачи при большой постоянной времени двигателя постоянного тока.
Кроме того, технически сложно получить на бесконтактных элементах напряжение постоянного тока, пропорциональное скорости вращения двигателя, а использование для этой цели реверсивных бесконтактных тахогенераторов постоянного тока значительно усложняет схему системы, увеличивает ее стоимость и габариты.
Предлагаемая схема отличается тем, что она содержит второй выпрямитель, вход которого соединен с выходом синхронного тахогенератора, а выход - с входом сумматора.
Это позволяет увеличить коэффициент передачи системы, не увеличивая электромеханическую постоянную времени двигателя.
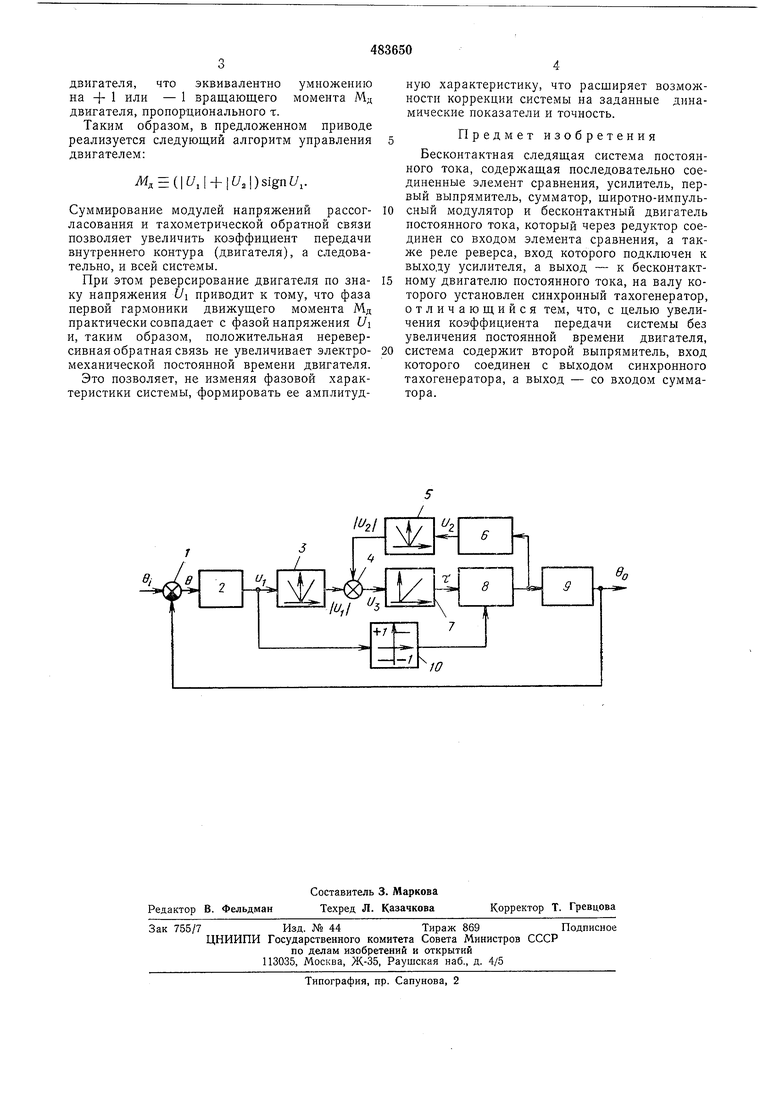
На чертеже изображена блок-схема бесконтактной следящей системы.
Рассогласование в в следящей системе выявляет элемент сравнения 1, преобразует и усиливает предварительный усилитель 2, выходное напряжение которого Ui поступает на выпрямитель 3. Выходное напряжение /t/i/выпрямителя 3 суммируется в сумматоре 4 с напряжением выпрямителя 5, преобразующего переменное напряжение синхронного тахогенератора 6 в постоянное напряжение/6 2/. С выхода сумматора 4 напряжение U поступает на вход широтно-импульсного модулятора 7.
Импульсы модулятора 7 с относительной длительностью т, пропорциональной напряжению f/s, подаются на коммутатор бесконтактного двигателя постоянного тока 8, выходной вал которого соединен с редуктором 9 и синхронным тахогенератором 6.
Напряжение t/i подается на вход реле реверса 10, а выходной вал редуктора 9 связан с элементом сравнения 1.
При работе системы реле 10 срабатывает при сменах- знака рассогласования и изменяет очередность коммутации силовых обмоток
двигателя, что эквивалентно умножению на + 1 или - 1 вращающего момента Мд двигателя, нронорционального т.
Таким образом, в предложенном приводе реализуется следующий алгоритм управления двигателем:
M,(U, + U,)signU,.
Суммирование модулей напряжений рассогласования и тахометрнческой обратной связи позволяет увеличить коэффициент передачи внутреннего контура (двигателя), а следовательно, и всей системы.
При этом реверсирование двигателя по знаку напряжения l/i приводит к тому, что фаза первой гармоники движущего момента Мд практически совпадает с фазой напряжения f/i и, таким образом, положительная нереверсивная обратная связь не увеличивает электромеханической постоянной времени двигателя.
Это позволяет, не изменяя фазовой характеристики системы, формировать ее амплитудную характеристику, что расширяет возможности коррекции системы на заданные динамические показатели и точность.
Предмет изобретения
Бесконтактная следящая система постоянного тока, содержащая последовательно соединенные элемент сравнения, усилитель, первый выпрямитель, сумматор, широтно-импульсный модулятор и бесконтактный двигатель постоянного тока, который через редуктор соединен со входом элемента сравнения, а также реле реверса, вход которого подключен к выходу усилителя, а выход - к бесконтактному двигателю постоянного тока, на валу которого установлен синхронный тахогенератор, отличающийся тем, что, с целью увеличения коэффициента передачи системы без увеличения постоянной времени двигателя, система содержит второй выпрямитель, вход которого соединен с выходом синхронного тахогенератора, а выход - со входом сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКОНТАКТНЫЙ СЛЕДЯЩИЙ ПРИВОД ПОСТОЯННОГО ТОКА С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ | 1972 |
|
SU435501A1 |
| Бесконтактная следящая система постоянного тока | 1973 |
|
SU470783A1 |
| Бесконтактная следящая система постоянного тока | 1979 |
|
SU930238A2 |
| Бесконтактная следящая система постоянного тока | 1974 |
|
SU474787A1 |
| Следящая система | 1979 |
|
SU862114A1 |
| Следящая система | 1978 |
|
SU763851A1 |
| Следящая система | 1979 |
|
SU847275A1 |
| Бесконтактная следящая система постоянного тока | 1974 |
|
SU525921A1 |
| Следящая система | 1986 |
|
SU1352451A1 |
| Следящая система | 1975 |
|
SU742871A1 |
/
в
