1
Изобретение относится к области подъемно-транспортного оборудования.
Известны автоматические захваты для штучных грузов, работающие на принципе рычажного механизма с автоватическим переключением положения захватных крюков, содержащие раму с захватными крюками, соединенными посредством тяг с механизмом фиксации их в раскрытом положении, состоящим из двухсекционной телескопической стойки, внутренняя и наружная секции которой взаимосвязаны посредством поворотной звездочки, выполняющей функцию фиксатора положения рычагов захватов.
Недостатком автоматического захвата является то, что механизм фиксации положения рычагов захватов выполнен незащищенным от попадания в него влаги, пыли и грязи и то, что при подъеме груза возможна деформация за счет момента сил рычажного механизма и силы тяжести груза.
С целью повышения надежности работы в предлагаемом автоматическом захвате внутренняя секция своим основанием прикреплена к раме захвата, а поворотная звездочка установлена на ее верхнем конце.
С целью обеспечения фиксации положения крюков в предлагаемом захвате рама может быть снабжена ограничительными упорами, обеспечивающими фиксированное положение
захватных крюков, что позволяет транспортировать грузы за проушины, исключая их деформацию.
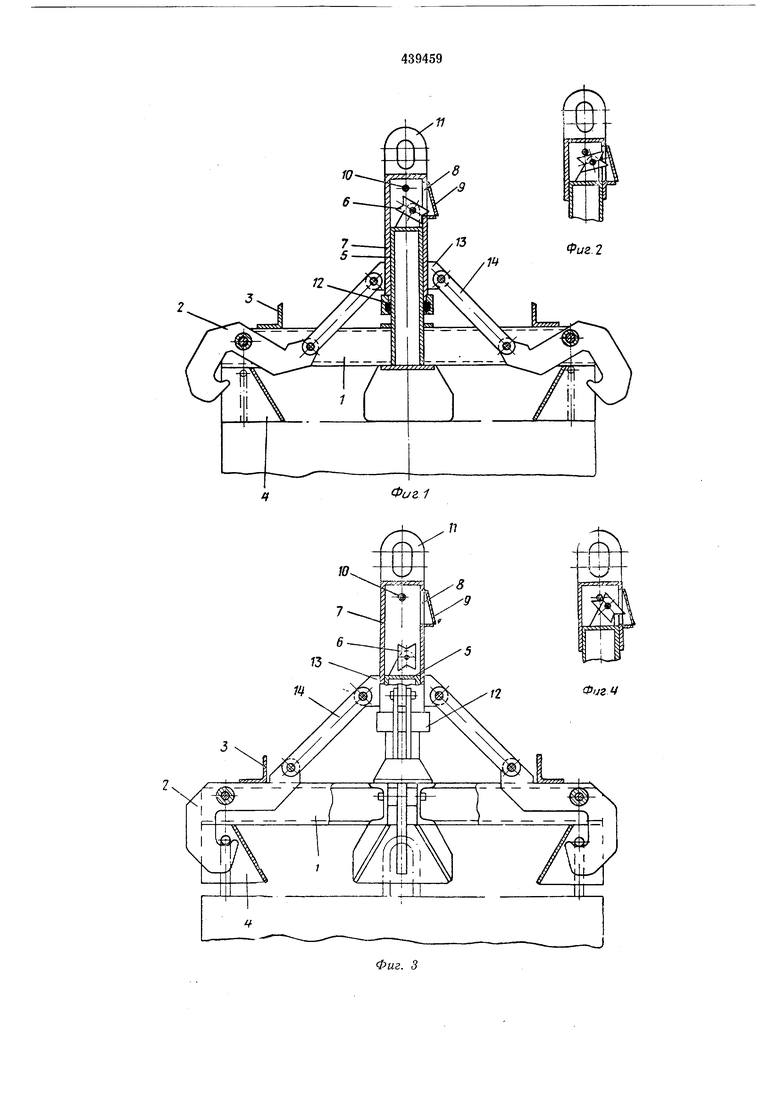
На фиг. 1 изображен предлагаемый автоматический захват в транспортном положении без груза (после отстроповки), общий вид; на фиг. 2 -- положение поворотной звездочки в момент, когда захват полностью опущен на груз для строповки; на фиг. 3 - захват в рабочем положении при подъеме груза, общий вид; на фиг. 4 - положение поворотной звездочки при установке груза на площадку для отстроповки. Автоматический захват состоит из рамы,
поворотных захватных крюков и механизма переключения их положения.
Рама захвата выполнена в виде нескольких радиально расположенных консолей 1, на которых укреплены поворотные захватные
крюки 2, ограничительные упоры 3 и направляющие гнезда 4.
Механизм переключения положения крюков выполнен в виде двухсекционной телескопической стойки, внутренняя секция 5 которой связана с поворотной звездочкой 6, взаимодействующей с наружной секцией 7, оборудованной окном 8, козырьков 9, цилиндрическим упором 10, серьгой 11, сальником 12 и
кронштейнами 13, шарнирно связанными с
помощью жестких тяг 14 с поворотными захватными крюками 2.
Рама захвата жестко прикреплена к основанию внутренней секции 5 телескопической стойки. Рама захвата может быть выполнена как в виде консолей I, расположенных радиально под любым углом один относительно другого, так и в виде рамных конструкций в зависимости от конфигурации поднимаемого груза.
Захват работает следующим образом.
Предлагаемый захват подвешивают к крюку грузоподъемного механизма (например, крана) за серьгу 11 и опускают на груз (например, контейнер с проушинами) таким образом, чтобы проушины груза вошли в направляющие гнезда 4 рамы, опираясь при этом на наружную поверхность груза, как показано на фиг. 1. При дальнейшем опускании крюка наружная секция 7 телескопической стойки под действием собственного веса опускает до тех пор, пока поворотная звездочка 6 не упрется в цилиндрический упор 10. При этом звездочка 6 займет положение, показанное на фиг. 2.
При подъеме автоматического захвата наружная секция 7 телескопической стойки поднимается вверх, поворотная звездочка 6 развертывается в вертикальное положение, а захватные крюки 2 входят в проушины груза так, как показано на фиг. 3, и зафиксируются в рабочем положении на все время транспортировки груза, так как дальнейший поворот захватных крюков будет ограничен упорами 3. После окончания рабочего цикла и опускания груза на поверхность площадки наружная секция 7 телескопической стойки опускается вниз, при этом поворотная звездочка 6 упрощается в цилиндрический упор 10 и развертывается в положение, показанное на фиг. 4. Одновременно тяги 14 опускаются вниз и выводят захватные крюки 2 из проушин груза. При дальнейшем опускании наружной секции 7 стойки поворотная звездочка 6 упирается в цилиндрический упор 10 (фиг. 2) и зафиксирует захватные крюки 2 в раскрытом положении, в результате чего
происходит отстроповка захвата от поднимаемого груза.
Предлагаемый автоматический захват может быть использован как для внутрицехового транспортирования грузов, так и для механизации погрузочно-разгрузочных работ на транспорте.
Полная герметизация механизма фиксации положения крюков позволяет использовать автоматический захват для садки изделий в
печи с кипящим слоем.
Предмет изобретения
1. Автоматический захват для штучных грузов, содержащий раму с захватными крюками, соединенными посредством тяг с механизмом фиксации их в расткрытом положении, состоящим из двухсекционной телескопической стойки, внутренняя и наружная секции которой взаимосвязаны посредством поворотной звездочки, отличающийся тем, что, с целью повышения надежности его работы, внутренняя секция своим основанием прикреплена к раме захвата, а поворотная звездочка установлена на ее верхнем конце.
2. Захват по п. 1, отличающийся тем, что, с целью обеспечения фиксации положения крюков, рама снабжена ограничительными упорами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для грузов сошТыРЕМ и фигуРНОй гОлОВКОй | 1979 |
|
SU816935A1 |
| Грузозахватное устройство | 1978 |
|
SU906899A1 |
| Автоматический захват | 1958 |
|
SU117634A2 |
| Захватное устройство для грузов с отбортовкой | 1983 |
|
SU1085925A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ ДЛЯ ПЕРЕМЕЩЕНИЯ ШТУЧНЫХ ГРУЗОВ | 1972 |
|
SU336256A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Автоматический захват | 1957 |
|
SU109523A1 |
| Захватное устройство для изделий с вертикальным отверстием | 1990 |
|
SU1782913A1 |
| ВИРАЖ БЕГОВОЙ ДОРОЖКИ ЗАЛА | 1992 |
|
RU2016998C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА, КРЕПЛЕНИЯ И ОПУСКАНИЯ ЗАПАСНОГО КОЛЕСА НА БОЛЬШЕГРУЗНЫХ АВТОМОБИЛЯХ | 1993 |
|
RU2048352C1 |