1
Изобретение относится к манипуляторам, применяемым в станкостроении и других отраслях промышленности.
Известны способы адаптации робота - переносчика к форме и положению предметов, основанные на ориентации схвата робота в зависимости от положения предмета. Однако производительность и точность способов низка.
Для сокращения времени и повышения точности адаптации определяют координаты точек соприкосновения предмета с рабочей поверхностью по дискретному потенциальному рельефу, созданному плоским предметом на чувствительном поле рабочей поверхности, затем определяют угол наклона выбранной линии на предмете к горизонтальной оси поля, после чего преобразуют полученные параметры в сигналы, которые управляют движением и ориентацией схвата робота.
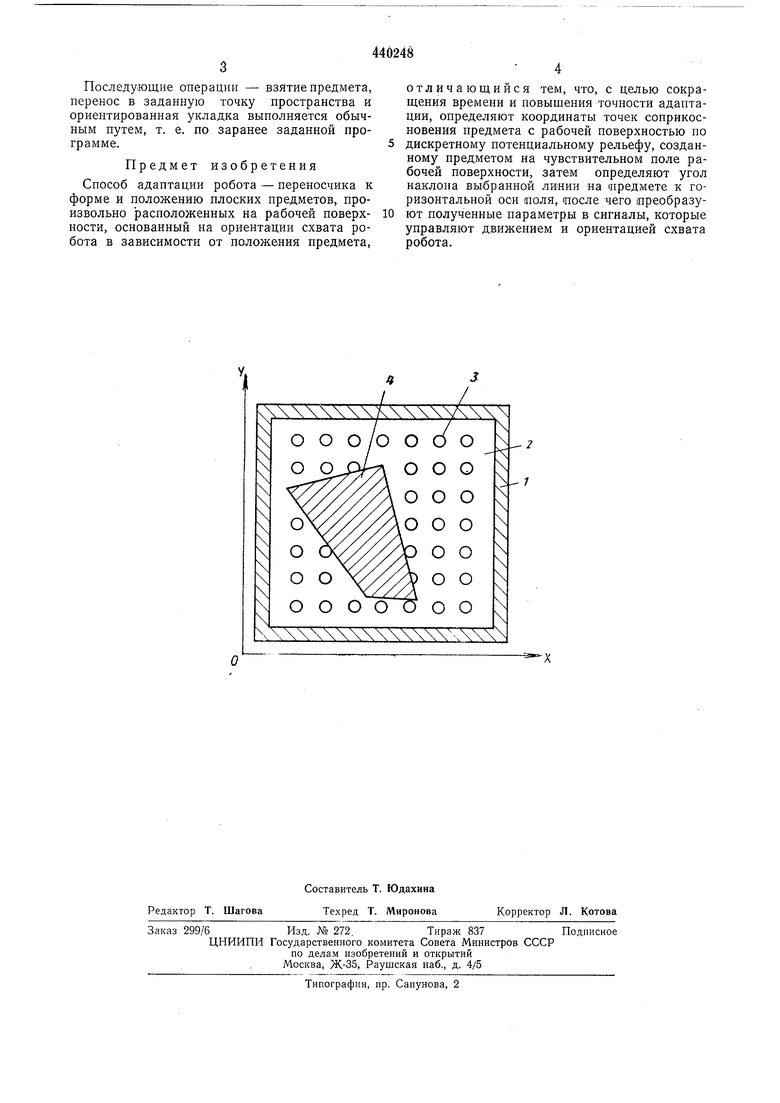
Один из вариантов реализации предлагаемого способа представлен на чертеже. На чертеже приняты следующие обозначения: рабочая поверхность 1, чувствительное поле 2, датчики 3 и предмет 4, находящийся на чувствительном поле рабочей поверхности. Предмет 4, находящийся па чувствительном поле 2 рабочей поверхности 1, воздействует на датчики 3, расположенные непосредственно под ним. В
случае датчиков, выполненных в виде нормально разомкнутых контактов, происходит замыкание контактов под действием тяжести предметов. Таким образом, способ адаптации сводится к определению координат точек соприкосновения предмета с рабочей поверхностью (осуществляется, например, путем опроса всех датчиков чувствительного поля в определенной последовательности с помощью
электронного коммутатора); определению угла наклона выбранной линии, например, оси симметрии предмета к горизонтальной оси чувствительного поля (выполняется с помощью решающего устройства, использующего сведения, получаемые в результате предыдущей операции); преобразованию полученных параметров положения ориентации предмета в электрические сигналы (например, в аналоговые напряжения); к выводу схвата робота -над центром предмета и ориентации схвата в соответствии с углом наклона предмета к горизонтальной оси чувствительного поля (осуществляется путем воздействия на соответствующие звенья кинематической цепи
робота электрическими сигналами, полученными в результате предыдущей операции). Перечисленные операции обеспечивают адаптацию робота - переносчика к форме и положению предмета на рабочей поверхности.
Последующие операции - взятие предмета, перенос в заданную точку пространства и ориентированная укладка выполняется обычным путем, т. е. по заранее заданной программе.
Предмет изобретения
Способ адаптации робота - переносчика к форме и положению плоских предметов, произвольно расположенных на рабочей поверхности, основанный на ориентации схвата робота в зависимости от положения предмета.
отличающийся тем, что, с целью сокращения времени и повыщения точности адаптации, определяют координаты точек соприкосновения предмета с рабочей поверхностью по дискретному потенциальному рельефу, созданному предметом на чувствительном поле рабочей поверхности, затем определяют угол наклона выбранной линии на предмете к горизонтальной оси (ПОЛЯ, после чего преобразуют полученные параметры в сигналы, которые управляют движением и ориентацией схвата робота.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления автоматическим роботом-манипулятором | 1973 |
|
SU447687A1 |
| Устройство для управления адаптивным РОбОТОМ | 1978 |
|
SU813360A1 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU881669A1 |
| Устройство для управления адаптив-НыХ РОбОТОМ | 1979 |
|
SU834667A1 |
| Схват промышленного робота | 1984 |
|
SU1291389A1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Устройство для ориентирования плоских деталей | 1984 |
|
SU1222360A1 |
| АДАПТИВНЫЙ МОБИЛЬНЫЙ ПРОСТРАНСТВЕННЫЙ РОБОТ-МАНИПУЛЯТОР ДЛЯ ПРОТЕЗИРОВАНИЯ ВЕРХНЕЙ КОНЕЧНОСТИ ПАЦИЕНТА И СПОСОБ ОБСЛУЖИВАНИЯ ПАЦИЕНТА ПОСРЕДСТВОМ АДАПТИВНОГО МОБИЛЬНОГО ПРОСТРАНСТВЕННОГО РОБОТА-МАНИПУЛЯТОРА | 2020 |
|
RU2738859C1 |
.
О О /О
о
о о о оо о о
ОС/
о
-2
1
