1
Изобретение относится к системам, управляемым вычислительными устройствами, а также к автоматическим работам-манипуляторам, предназначенным для автоматизации различных технологических процессов и операций во многих отраслях промышленности, Б частности, в станкостроении, приборостроении и сталелитейной промышленности.
Известны роботы-манипуляторы, осуществляющие ряд технологических операций по переносу предмета с места на место, ориентированной укладке и т. д. Устройство управления таким роботом-манипулятором содержит датчики контакта с предметом, которые через блок опроса датчиков соединены с соответствующими входами блока опроса параметров положения предмета в рабочей зоне. Блок управления схватом имеет набор стандартных программ, определяющий виды работ (например, перенос предмета в заданную точку, ориентированная укладка и т. п.). Поиск предмета осуществляется по определенной траектории, определяемой программой поиска, т. е, обеспечивается «слепое обнаружение предмета.
Робот-манипулятор позволяет заменить ручной труд машинным при выполнении некоторых технологических операций, что дает возможность увеличить производительность труда и обеспечить работу в горячих и вредных
средах при отсутствии человека. Кроме того, такие роботы освобождают рабочего от выполнения тяжелого и монотонного ручного труда.
Однако этим роботам-манипуляторам свойственно малое быстродействие, вследствие длительного поиска предмета, а также значительная сложность всего устройства. Реализация затруднена жесткими требованиями,
предъявляемыми к датчикам и другим элементам, особенно в условиях горячих и вредных сред.
Цель изобретения - повышение быстродействия и упрощение устройства управления роботом-манипулятором.
Предлагаемое устройство для управления роботом-манипулятором содержит чувствительное поле, выполненное в виде матрицы подвижных шин, установленных над токопроводящей подложкой и подпружиненных относительно ее. Каждая шина матрицы снабжена контактами, установленными на стороне, обращенной к токопроводящей подложке, а контакты соединены между собой и соответствующими входами блока опроса датчиков, причем каждая шина изолирована от контактов других шин.
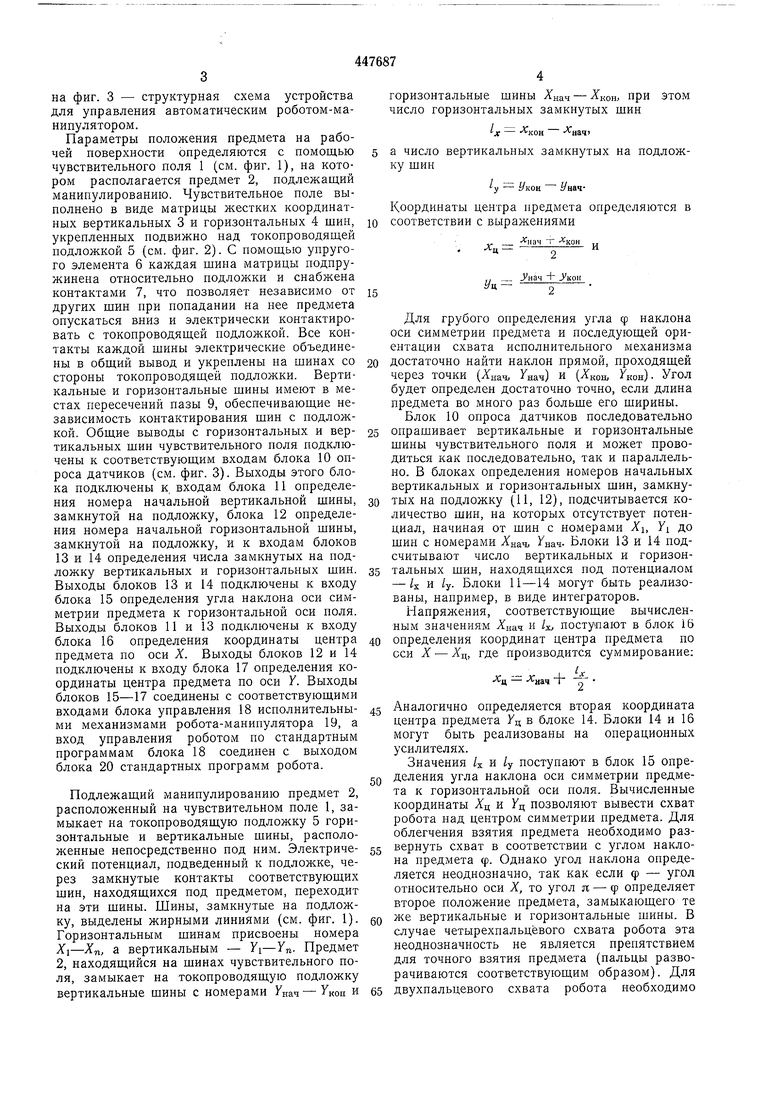
На фиг. i схематически представлено чувствительное поле; на фиг. 2 - один из вариантов выполнения шин чувствительного поля;
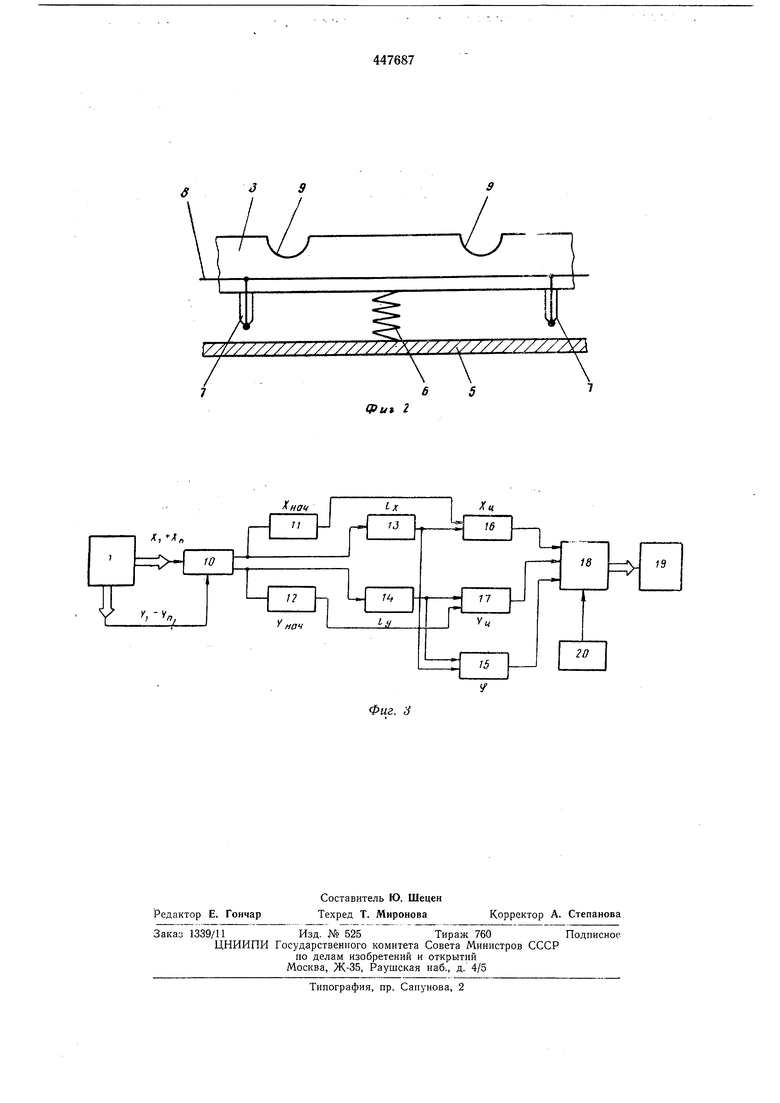
на фиг. 3 - структурная схема устройства для управления автоматическим роботом-манипулятором.
Параметры положения предмета на рабочей поверхности определяются с помощью чувствительного поля 1 (см. фиг. 1), на котором располагается предмет 2, подлежащий манипулированию. Чувствительное поле выполнено в виде матрицы жестких координатных вертикальных 3 и горизонтальных 4 щин, укрепленных подвижно над токопроводящей подложкой 5 (см. фиг. 2). С помощью упругого элемента 6 каждая щина матрицы подпружинена относительно подложки и снабжена контактами 7, что позволяет независимо от других щин при попадании на нее предмета опускаться вниз и электрически контактировать с токопроводящей подложкой. Все контакты каждой шины электрические объединены в общий вывод и укреплены на шинах со стороны токопроводящей подложки. Вертикальные и горизонтальные шины имеют в местах пересечений пазы 9, обеспечивающие независимость контактирования шин с подложкой. Общие выводы с горизонтальных и вертикальных шин чувствительного поля подключены к соответствующим входам блока 10 опроса датчиков (см. фиг. 3). Выходы этого блока подключены к, входам блока 11 определения номера начальной вертикальной щины, замкнутой на подложку, блока 12 определения номера начальной горизонтальной шины, замкнутой на подложку, и к входам блоков 13 и 14 определения числа замкнутых на подложку вертикальных и горизонтальных шин. Выходы блоков 13 и 14 подключены к входу блока 15 определения угла наклона оси симметрии предмета к горизонтальной оси поля. Выходы блоков 11 и 13 подключены к входу блока 16 определения координаты центра предмета по оси X. Выходы блоков 12 и 14 подключены к входу блока 17 определения координаты центра предмета по оси У. Выходы блоков 15-17 соединены с соответствующими входами блока управления 18 исполнительными механизмами робота-манипулятора 19, а вход управления роботом по стандартным программам блока 18 соединен с выходом блока 20 стандартных программ робота.
Подлежащий манипулированию предмет 2, расположенный на чувствительном поле 1, замыкает на токопроводящую подложку 5 горизонтальные и вертикальные шины, расположенные непосредственно под ним. Электрический потенциал, подведенный к подложке, через замкнутые контакты соответствующих щин, находящихся под предметом, переходит на эти шины. Шины, замкнутые на подложку, выделены жирными линиями (см. фиг. 1). Горизонтальным щинам присвоены номера Xi-Хп, а вертикальным - YI-У. Предмет 2, находящийся на щинах чувствительного поля, замыкает на токопроводящую подложку вертикальные щины с номерами Унач-УКОП и
горизонтальные шины Х - кош при этом число горизонтальных замкнутых щин
Ijf -
а ЧИСЛО вертикальных замкнутых на подложку шин
у - Укои. УмчКоординаты центра предмета определяются в соответствии с выражениями
.. Т ..
И
.Унач г Уко11
У
Для грубого определения угла ф наклона оси симметрии предмета и последующей ориентации схвата исполнительного механизма
достаточно найти наклон прямой, проходящей
через точки (нач, Унач) и (Хков, УКОН). Угол
будет определен достаточно точно, если длина
предмета во много раз больше его ширины.
Блок 10 опроса датчиков последовательно
опрашивает вертикальные и горизонтальные шины чувствительного поля и может проводиться как последовательно, так и параллельно. В блоках определения номеров начальных вертикальных и горизонтальных шин, замкнутых на подложку (11, 12), подсчитывается количество шин, на которых отсутствует потенциал, начиная от шин с номерами Xi, Yi до шин с номерами , Увач. Блоки 13 и 14 подсчитывают число вертикальных и горизонтальных шин, находящихся под потенциалом - /X и /у. Блоки 11-14 могут быть реализованы, например, в виде интеграторов.
Напряжения, соответствующие вычисленным значениям нач и /х, поступают в блок 16
определения координат центра предмета по оси X - Хц, где производится суммирование:
Лц л:„ач -j- - .
Аналогично определяется вторая координата
центра предмета Уц в блоке 14. Блоки 14 и 16
могут быть реализованы на операционных
усилителях.
Значения /х и /у поступают в блок 15 определения угла наклона оси симметрии предмета к горизонтальной оси поля. Вычисленные координаты Хц и Уц позволяют вывести схват робота над центром симметрии предмета. Для облегчения взятия предмета необходимо развернуть схват в соответствии с углом наклона предмета ф. Однако угол наклона определяется неоднозначно, так как если ф - угол относительно оси X, то угол я - ф определяет второе положение предмета, замыкающего те
же вертикальные и горизонтальные шины. В случае четырехпальцёвого схвата робота эта неоднозначность не является препятствием для точного взятия предмета (пальцы разворачиваются соответствующим образом). Для
двухпальцевого схвата робота необходимо
пробное взятие в соответствии с вычисленным углом ф. В случае неудачной попытки схват разворачивается на угол я -ф и захватывает предмет.
Сигналы, содержащие сведения о координатах и угле наклона ф, в виде аналоговых напряжений подаются в блок 18 управления исполнительными механизмами робота, осуществляющий преобразование этих сигналов в форму, необходимую для управления угловыми и линейными перемещениями схвата робота. В этот же блок вводятся напряжения из блока 20 стандартных программ, управляющие перемещениями схвата робота после взятия предмета. Стандартные программы позволяют производить заданные виды работ: перенос предмета в определенную точку, ориентированную укладку, сортировку и т. п.
Реализация устройства для управления автоматическим роботом-манипулятором не представляет трудностей. Конструкция чувствительного поля проста и для его изготовления не требуется применения дорогостоящего и сложного оборудования. Вся электронная часть может быть выполнена на стандартных
интегральных микросхемах - логических элементах 133-й серии и операционных усилителях типа 1УТ 401 и т. п.
Предмет изобретения
Устройство для управления автоматическим роботом-манипулятором, содержащее датчики контакта с предметом, выходы которых через блок опроса датчиков связаны с соответствующими входами блока определения параметров положения предмета, выходы которого соединены с соответствующими входами блока управления исполнительным органом, о тличающееся тем, что, с целью повышеНИН быстродействия и упрощения устройства, оно содержит чувствительное поле, выполненное в виде матрицы подвижных шин, установленных над токопроводящей подложкой и подпружиненных относительно нее, каждая шина
снабжена контактами, установленными на стороне, обращенной к токопроводящей подложке, причем контакты каждой шины электрически соединены друг с другом и с соответствующим входом блока опроса датчиков и
изолированы от контактов других шин.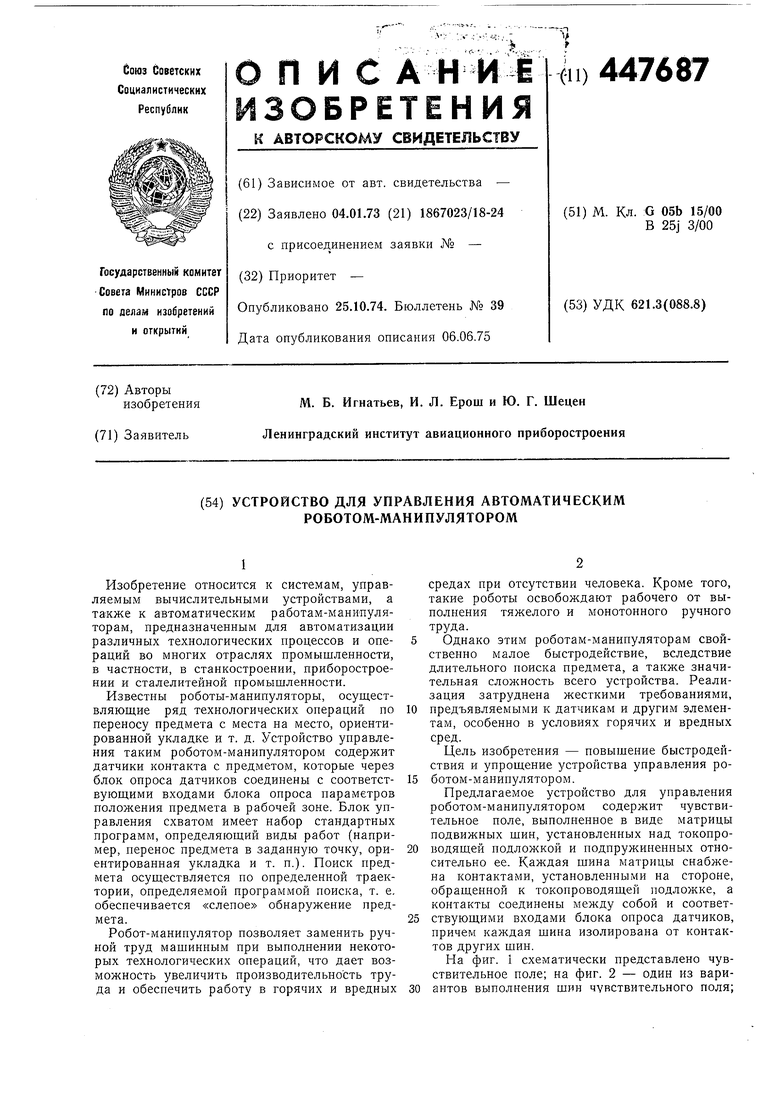

J9
////Л//
9ut 2
Фиг. 3
